移动机器人的制作方法
本技术涉及智能机器人,尤其涉及一种移动机器人。
背景技术:
1、在移动机器人领域,机器人的电池通常不可拆卸,主要通过手动或自动充电方式实现电池充电。
2、在一些应用场景中,移动机器人需要连续工作,而现有的电池充电的移动机器人无法满足移动机器人连续工作的需求。
技术实现思路
1、本实用新型的目的在于提出一种移动机器人,该移动机器人能够快速更换电池,满足移动机器人连续工作的需求。
2、为达此目的,本实用新型采用以下技术方案:
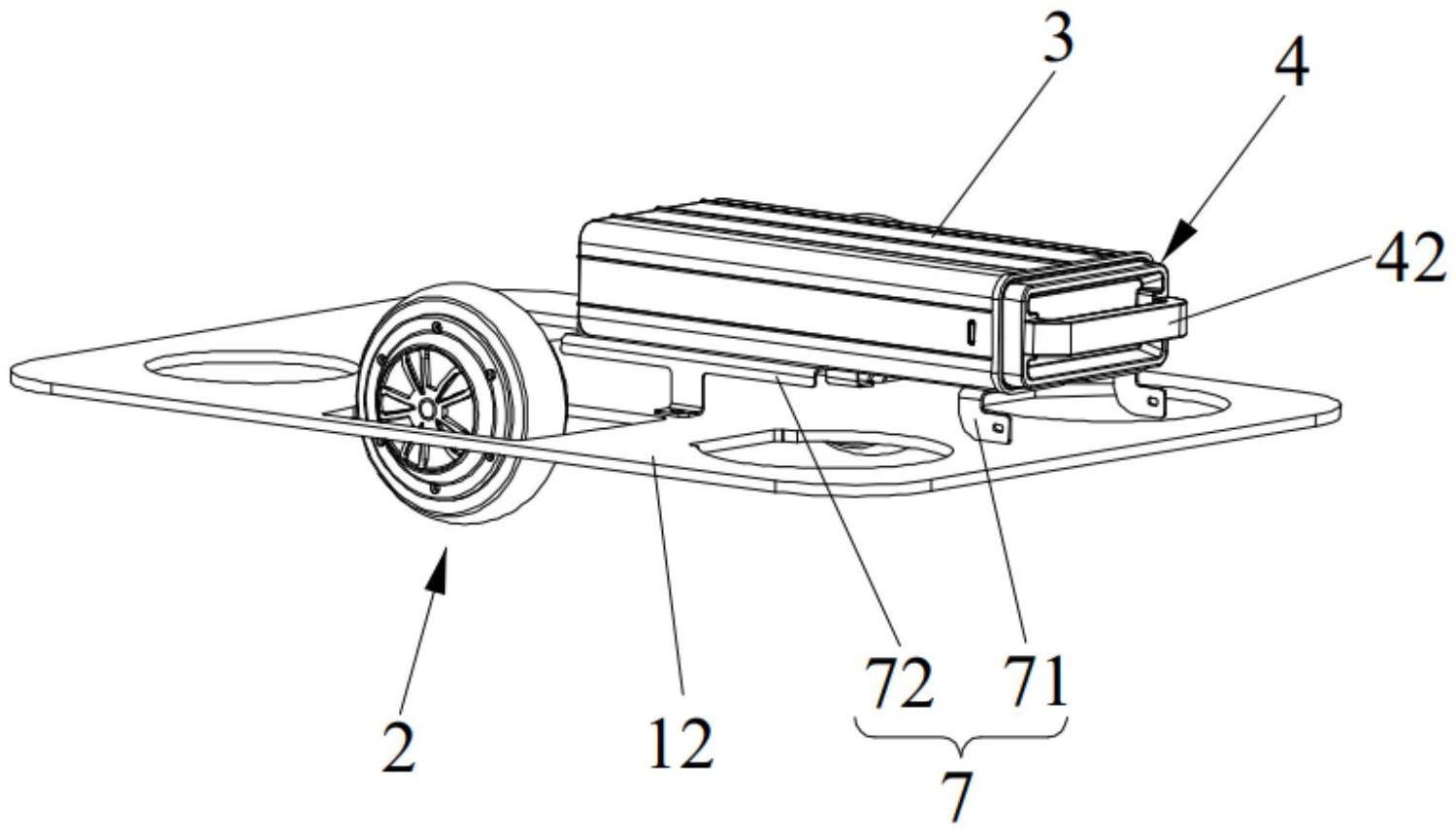
3、移动机器人,包括电池仓和电池模组,所述电池模组与所述电池仓可拆卸连接;
4、所述电池仓的一端设置有母头插接件,所述电池模组的一端设置有公头插接件,所述公头插接件与所述母头插接件插接配合;
5、所述电池模组还设置有可伸缩的卡接件,所述卡接件伸出,所述电池模组能与所述电池仓卡接,所述卡接件缩回,所述电池模组能与所述电池仓脱离卡接。
6、作为移动机器人的一个可选方案,所述电池模组还包括按钮,所述按钮位于所述电池仓的外部,通过所述按钮控制所述卡接件伸缩。
7、作为移动机器人的一个可选方案,所述按钮通过连接组件与所述卡接件连接,所述连接组件的一端连接所述按钮,另一端连接所述卡接件,所述按钮用于驱动所述连接组件,以使所述卡接件伸缩。
8、作为移动机器人的一个可选方案,所述连接组件包括连接块和卡套,所述连接块的一端与所述按钮连接,另一端穿过所述卡套与所述卡接件连接,所述卡套设于所述电池模组内,所述卡接件可伸缩地设置于所述卡套内,所述卡接件的伸缩方向与所述连接块的移动方向垂直,所述按钮用于驱动所述连接块移动,以使所述卡接件伸缩。
9、作为移动机器人的一个可选方案,所述卡接件通过弹性件与所述卡套连接,所述卡接件在所述弹性件的弹力作用下,能伸出所述卡套与所述电池仓卡接。
10、作为移动机器人的一个可选方案,所述卡接件上设置有滑槽,所述连接块的一端滑动设置于所述滑槽内,另一端与所述按钮连接;
11、所述滑槽倾斜设置,所述滑槽自靠近所述弹性件的一端延伸至远离所述弹性件的一端,所述滑槽靠近所述弹性件的一端与所述按钮之间的距离大于所述滑槽远离所述弹性件的一端与所述按钮之间的距离。
12、作为移动机器人的一个可选方案,所述电池模组还包括联动支架,所述连接组件和所述卡接件均一一对应设置有至少两个,所述按钮连接于所述联动支架的中部,至少两个所述连接组件分别与所述联动支架连接。
13、作为移动机器人的一个可选方案,所述电池模组还包括推拉把手,所述联动支架设置于所述推拉把手内,所述推拉把手上设置有避让口,所述按钮活动设置于所述避让口。
14、作为移动机器人的一个可选方案,所述移动机器人还包括机体,所述电池仓设置于所述机体内,所述机体上设置有拆卸口,所述拆卸口对应所述推拉把手设置。
15、作为移动机器人的一个可选方案,所述移动机器人还包括安装支架,所述安装支架与所述机体连接,所述电池仓设置于所述安装支架上。
16、本实用新型的有益效果:
17、本实用新型提供的移动机器人,通过将电池模组设置为与电池仓可拆卸连接,以在电池模组没电时,将电池模组从电池仓内拆卸,更换新的电池模组,以满足移动机器人的连续工作。电池模组的一端通过公头插接件与电池仓的母头插接件插接配合,以传输电池模组的电能。电池模组还设置有可伸缩的卡接件,卡接件伸出与电池仓卡接配合,用于固定电池模组。当拆卸电池模组时,卡接件缩回,电池模组能与电池仓脱离卡接,然后将电池模组从电池仓内拔出,公头插接件与母头插接件脱离插接,从而快速更换新的电池模组,以保证移动机器人连续工作。
技术特征:
1.移动机器人,其特征在于,包括电池仓和电池模组,所述电池模组与所述电池仓可拆卸连接;
2.根据权利要求1所述的移动机器人,其特征在于,所述电池模组还包括按钮,所述按钮位于所述电池仓的外部,通过所述按钮控制所述卡接件伸缩。
3.根据权利要求2所述的移动机器人,其特征在于,所述按钮通过连接组件与所述卡接件连接,所述连接组件的一端连接所述按钮,另一端连接所述卡接件,所述按钮用于驱动所述连接组件,以使所述卡接件伸缩。
4.根据权利要求3所述的移动机器人,其特征在于,所述连接组件包括连接块和卡套,所述连接块的一端与所述按钮连接,另一端穿过所述卡套与所述卡接件连接,所述卡套设于所述电池模组内,所述卡接件可伸缩地设置于所述卡套内,所述卡接件的伸缩方向与所述连接块的移动方向垂直,所述按钮用于驱动所述连接块移动,以使所述卡接件伸缩。
5.根据权利要求4所述的移动机器人,其特征在于,所述卡接件通过弹性件与所述卡套连接,所述卡接件在所述弹性件的弹力作用下,能伸出所述卡套与所述电池仓卡接。
6.根据权利要求5所述的移动机器人,其特征在于,所述卡接件上设置有滑槽,所述连接块的一端滑动设置于所述滑槽内,另一端与所述按钮连接;
7.根据权利要求3所述的移动机器人,其特征在于,所述电池模组还包括联动支架,所述连接组件和所述卡接件均一一对应设置有至少两个,所述按钮连接于所述联动支架的中部,至少两个所述连接组件分别与所述联动支架连接。
8.根据权利要求7所述的移动机器人,其特征在于,所述电池模组还包括推拉把手,所述联动支架设置于所述推拉把手内,所述推拉把手上设置有避让口,所述按钮活动设置于所述避让口。
9.根据权利要求8所述的移动机器人,其特征在于,所述移动机器人还包括机体,所述电池仓设置于所述机体内,所述机体上设置有拆卸口,所述拆卸口对应所述推拉把手设置。
10.根据权利要求9所述的移动机器人,其特征在于,所述移动机器人还包括安装支架,所述安装支架与所述机体连接,所述电池仓设置于所述安装支架上。
技术总结
本技术公开了一种移动机器人,涉及移动机器人技术领域。该移动机器人包括电池仓和电池模组,电池模组与电池仓可拆卸连接。电池仓的一端设置有母头插接件,电池模组的一端设置有与母头插接件插接配合的公头插接件,电池模组还设置有可伸缩的卡接件,卡接件伸出,电池模组能与电池仓卡接,卡接件缩回,电池模组能与电池仓脱离卡接。该移动机器人能够快速将电池模组从电池仓内取出,更换新的电池模组,以保证移动机器人连续工作。
技术研发人员:王毅可,唐旋来,李通
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!