用于锥形金属筒的抓取装置及抓取机器人的制作方法
本技术涉及抓取设备,尤其涉及一种用于锥形金属筒的抓取装置及抓取机器人。
背景技术:
1、目前锥形金属筒产品的上下料基本都是手工取放,因为产品加工完成后表面很光滑,有一定重量且是锥形,对精准的自动抓取放有一定难度,此锥形产品在军工和一些精密加工企业有大量的生产。传统的方式是人工搬运,劳动力成本高、效率低,搬运工的工作环境恶劣,不利于人体健康。也有一些企业研发设计了全自动或者半自动的抓手,用来取代部分人工操作,提高生产效率。但是,现有的抓手均存在结构相对较复杂、成本较高的问题。
技术实现思路
1、针对上述现有技术中的问题,本申请提出了一种用于锥形金属筒的抓取装置及抓取机器人,能够解决锥形金属筒的抓取问题。
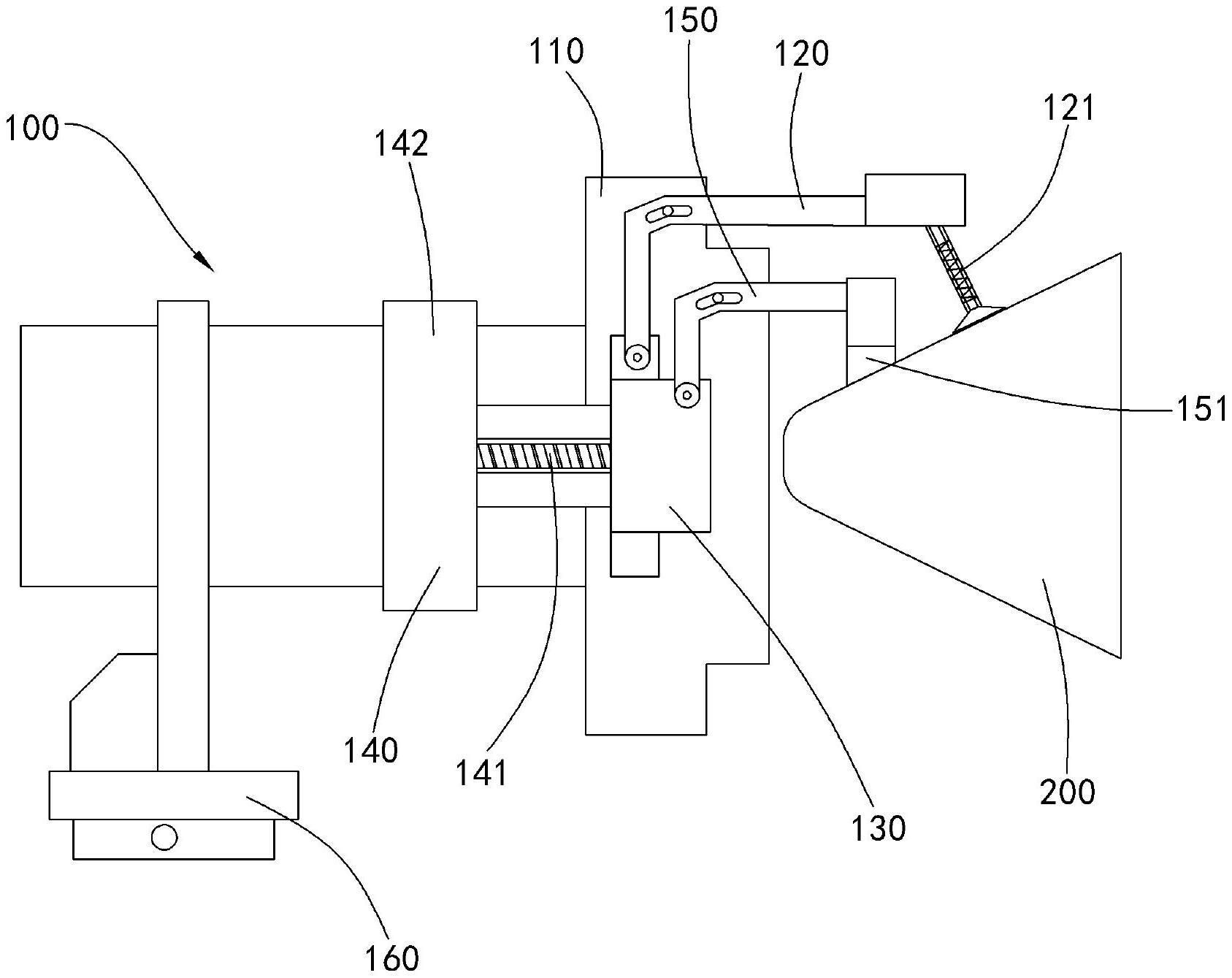
2、本实用新型的一方面提供一种用于锥形金属筒的抓取装置,所述抓取装置包括安装座,所述安装座上沿其周向间隔可转动安装有多个抓取爪,所述抓取爪的第一端部安装有吸附件,所述安装座上安装有能够沿所述安装座轴向移动的滑动块以及用于驱动所述滑动块移动的驱动机构,各所述抓取爪的第二端均与所述滑动块铰接,所述驱动机构能够驱动所述滑动块移动以带动各所述抓取爪转动,以使所述吸附件吸附于所述锥形金属筒的外侧壁。
3、作为上述技术方案的进一步改进:
4、上述的用于锥形金属筒的抓取装置,进一步地,所述安装座上沿其周向间隔可转动安装有多个定位爪,所述定位爪的第一端部安装有定位块,各所述定位爪的第二端均与所述滑动块铰接,所述驱动机构能够驱动所述滑动块移动以带动各所述定位爪转动,以使所述定位块形成与所述锥形金属筒相匹配的锥形定位槽。
5、上述的用于锥形金属筒的抓取装置,进一步地,所述驱动机构包括沿所述安装座的轴向延伸的丝杆以及能够驱动所述丝杆转动的旋转驱动件,所述滑动块与所述丝杆螺纹配合,所述旋转驱动件能够驱动所述丝杆转动以带动所述滑动块沿所述安装座轴向移动。
6、上述的用于锥形金属筒的抓取装置,进一步地,所述旋转驱动件为伺服电机。
7、上述的用于锥形金属筒的抓取装置,进一步地,所述吸附件为圆形波纹吸盘。
8、上述的用于锥形金属筒的抓取装置,进一步地,所述安装座上安装有快速切换机构,所述快速切换机构能够与机械臂相连。
9、本实用新型的另一方面提供一种抓取机器人,所述抓取机器人包括机械臂以及如上述的用于锥形金属筒的抓取装置,所述抓取装置安装于所述机械臂上。
10、上述技术特征可以各种适合的方式组合或由等效的技术特征来替代,只要能够达到本实用新型的目的。
11、本实用新型提供的一种用于锥形金属筒的抓取装置及抓取机器人,与现有技术相比,至少具备有以下有益效果:当需要使用该用于锥形金属筒的抓取装置抓取锥形金属筒时,驱动该抓取装置靠近锥形金属筒,然后驱动机构驱动滑动块移动以带动各抓取爪转动,以使吸附件吸附于锥形金属筒的外侧壁,由此对锥形金属筒进行抓取至其它位置,然后驱动机构驱动滑动块反向移动以带动各抓取爪转动,以使吸附件从锥形金属筒的外侧壁上脱离,从而释放锥形金属筒。该抓取装置能够解决锥形金属筒的抓取问题,同时具有结构简单,操作简便等优点。
12、为使本实用新型的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种用于锥形金属筒的抓取装置,其特征在于,所述抓取装置包括安装座,所述安装座上沿其周向间隔可转动安装有多个抓取爪,所述抓取爪的第一端部安装有吸附件,所述安装座上安装有能够沿所述安装座轴向移动的滑动块以及用于驱动所述滑动块移动的驱动机构,各所述抓取爪的第二端均与所述滑动块铰接,所述驱动机构能够驱动所述滑动块移动以带动各所述抓取爪转动,以使所述吸附件吸附于所述锥形金属筒的外侧壁。
2.根据权利要求1所述的用于锥形金属筒的抓取装置,其特征在于,所述安装座上沿其周向间隔可转动安装有多个定位爪,所述定位爪的第一端部安装有定位块,各所述定位爪的第二端均与所述滑动块铰接,所述驱动机构能够驱动所述滑动块移动以带动各所述定位爪转动,以使所述定位块形成与所述锥形金属筒相匹配的锥形定位槽。
3.根据权利要求1所述的用于锥形金属筒的抓取装置,其特征在于,所述驱动机构包括沿所述安装座的轴向延伸的丝杆以及能够驱动所述丝杆转动的旋转驱动件,所述滑动块与所述丝杆螺纹配合,所述旋转驱动件能够驱动所述丝杆转动以带动所述滑动块沿所述安装座轴向移动。
4.根据权利要求3所述的用于锥形金属筒的抓取装置,其特征在于,所述旋转驱动件为伺服电机。
5.根据权利要求1所述的用于锥形金属筒的抓取装置,其特征在于,所述吸附件为圆形波纹吸盘。
6.根据权利要求1所述的用于锥形金属筒的抓取装置,其特征在于,所述安装座上安装有快速切换机构,所述快速切换机构能够与机械臂相连。
7.一种抓取机器人,其特征在于,所述抓取机器人包括机械臂以及如权利要求1至6任一项所述的用于锥形金属筒的抓取装置,所述抓取装置安装于所述机械臂上。
技术总结
本技术提供了一种用于锥形金属筒的抓取装置及抓取机器人,涉及抓取设备技术领域。该抓取装置包括安装座,安装座上沿其周向间隔可转动安装有多个抓取爪,抓取爪的第一端部安装有吸附件,安装座上安装有能够沿安装座轴向移动的滑动块以及用于驱动滑动块移动的驱动机构,各抓取爪的第二端均与滑动块铰接,驱动机构能够驱动滑动块移动以带动各抓取爪转动,以使吸附件吸附于锥形金属筒的外侧壁。基于本技术的技术方案,该抓取装置能够解决锥形金属筒的抓取问题,同时具有结构简单,操作简便等优点。
技术研发人员:刘强,丁维强,沈卓,邓晟,黄勇,李竹暄,李玉球,陈莹,涂昌波
受保护的技术使用者:长沙智能制造研究总院有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!