一种不同机器人之间数据转换后二次校准的方法及装置与流程
本发明涉及一种不同机器人之间数据转换后二次校准的方法及装置,属于机器人自动化加工。
背景技术:
1、随着自动化工业的发展,机器人技术在工业生产领域得到了广泛的应用。通过在机器人末端安装不同的执行机构(例如:喷枪或焊枪等)来完成各种作业任务。
2、执行机构的位置准确度直接影响着机器人的操作精度,然而由于执行机构自带的机械误差、在人工装配过程中造成的误差以及随着使用时间的延长造成的磨损误差等造成执行机构的理论位置与实际位置存在一定的固有误差,而同一执行动作由不同的机器人执行时会更加放大这种固有误差,因此对机器人进行校准是十分必要的。
3、当前实现多台机器人执行同一动作主要是通过人工采用工具对于每台机器人进行示教或将第一台机器人的点位程序直接复制到其它机器人上,这种机器人的校准方式存在较大的误差,且需要耗费较大的人力。
技术实现思路
1、本发明提供一种不同机器人之间数据转换后二次校准的方法、装置及计算机可读存储介质,其主要目的在于解决机器人的校准方式存在较大的误差,且需要耗费较大的人力的问题。
2、为实现上述目的,本发明提供的一种不同机器人之间数据转换后二次校准的方法,包括:
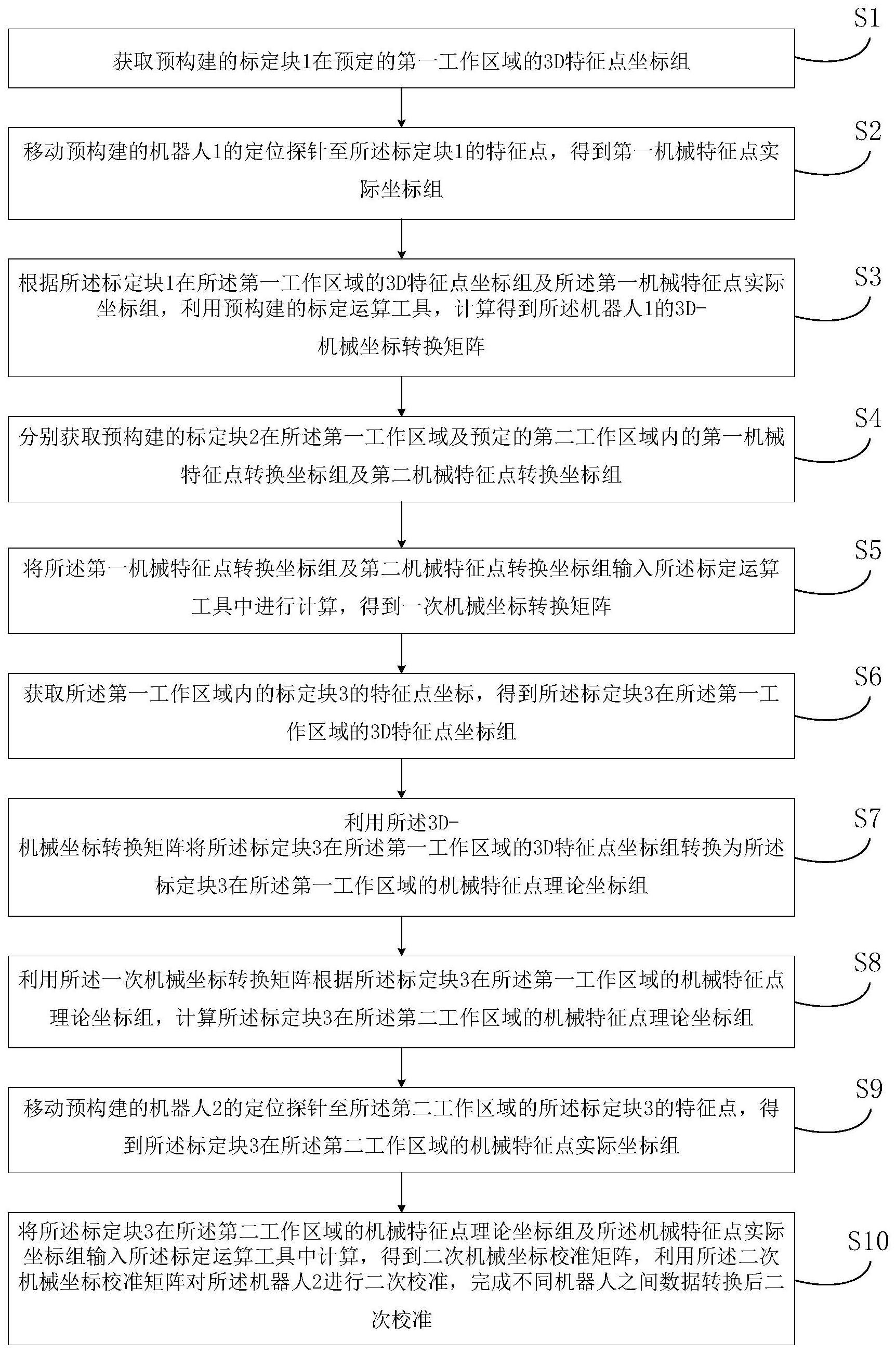
3、获取预构建的标定块1在预定的第一工作区域的3d特征点坐标组;
4、移动预构建的机器人1的定位探针至所述标定块1的特征点,得到第一机械特征点实际坐标组;
5、根据所述标定块1在所述第一工作区域的3d特征点坐标组及所述第一机械特征点实际坐标组,利用预构建的标定运算工具,计算得到所述机器人1的3d-机械坐标转换矩阵;
6、分别获取预构建的标定块2在所述第一工作区域及预定的第二工作区域内的第一机械特征点转换坐标组及第二机械特征点转换坐标组;
7、将所述第一机械特征点转换坐标组及第二机械特征点转换坐标组输入所述标定运算工具中进行计算,得到一次机械坐标转换矩阵;
8、获取所述第一工作区域内的标定块3的特征点坐标,得到所述标定块3在所述第一工作区域的3d特征点坐标组;
9、利用所述3d-机械坐标转换矩阵将所述标定块3在所述第一工作区域的3d特征点坐标组转换为所述标定块3在所述第一工作区域的机械特征点理论坐标组;
10、利用所述一次机械坐标转换矩阵根据所述标定块3在所述第一工作区域的机械特征点理论坐标组,计算所述标定块3在所述第二工作区域的机械特征点理论坐标组;
11、移动预构建的机器人2的定位探针至所述第二工作区域的所述标定块3的特征点,得到所述标定块3在所述第二工作区域的机械特征点实际坐标组;
12、将所述标定块3在所述第二工作区域的机械特征点理论坐标组及所述机械特征点实际坐标组输入所述标定运算工具中计算,得到二次机械坐标校准矩阵,利用所述二次机械坐标校准矩阵对所述机器人2进行二次校准,完成不同机器人之间数据转换后二次校准。
13、可选地,所述获取预构建的标定块1在预定的第一工作区域的3d特征点坐标组,包括:
14、利用预构建的3d相机依次扫描处于预定扫描点位的标定块1,得到不同扫描点位的标定块1的标定模型;
15、在所述标定块1的标定模型中提取标定孔对应的3d点云数据;
16、在所述标定孔对应的3d点云数据中提取3d特征点坐标,得到所述标定块1在预定的第一工作区域的3d特征点坐标组。
17、可选地,所述移动预构建的机器人1的定位探针至所述标定块1的特征点,得到第一机械特征点实际坐标组,包括:
18、移动所述机器人1的定位探针至处于不同扫描点位的所述标定块1的标定孔内,利用所述定位探针感应出不同扫描点位的所述标定块1的标定孔的机械点云数据;
19、在所述不同扫描点位的所述标定块1的标定孔的机械点云数据中提取标定孔机械圆心坐标,得到所述第一机械特征点实际坐标组。
20、可选地,所述根据所述标定块1在所述第一工作区域的3d特征点坐标组及所述第一机械特征点实际坐标组,利用预构建的标定运算工具,计算得到所述机器人1的3d-机械坐标转换矩阵,包括:
21、根据不同扫描点位的所述标定块1的3d点云数据构建所述第一工作区域的不同扫描点位的3d坐标系;
22、根据不同扫描点位的所述标定块1的机械点云数据构建所述第一工作区域的不同扫描点位的机械坐标系;
23、按照所述扫描点位的排列顺序分别对所述不同扫描点位的3d坐标系及机械坐标系进行顺序标定拼合,得到所述第一工作区域的3d坐标系及机械坐标系;
24、根据所述第一工作区域的3d坐标系中的3d特征点坐标组及所述机械坐标系中的第一机械特征点实际坐标组,利用所述标定运算工具排列计算出所述3d-机械坐标转换矩阵。
25、可选地,所述分别获取预构建的标定块2在所述第一工作区域及预定的第二工作区域内的第一机械特征点转换坐标组及第二机械特征点转换坐标组,包括:
26、移动所述机器人1的定位探针至所述标定块2的不同标定孔内的标定点位,得到所述标定块2在所述第一工作区域的第一机械特征点转换坐标组;
27、移动所述机器人2的定位探针至所述标定块2的不同标定孔内的标定点位,得到所述标定块2在所述第二工作区域的第二机械特征点转换坐标组。
28、可选地,所述将所述第一机械特征点转换坐标组及第二机械特征点转换坐标组输入所述标定运算工具中进行计算,得到一次机械坐标转换矩阵,包括:
29、在所述第一机械特征点转换坐标组及第二机械特征点转换坐标组中提取所述标定块2的同一标定孔内的机械特征点转换坐标;
30、利用所述标定运算工具,根据所述同一标定孔内的机械特征点转换坐标,计算所述一次机械坐标转换矩阵。
31、可选地,所述利用所述3d-机械坐标转换矩阵将所述标定块3在所述第一工作区域的3d特征点坐标组转换为所述标定块3在所述第一工作区域的机械特征点理论坐标组,包括:
32、从所述标定块3在所述第一工作区域的3d特征点坐标组中依次提取待转换3d特征点坐标;
33、利用所述3d-机械坐标转换矩阵依次将所述待转换3d特征点坐标转换为机械特征点理论坐标,得到所述标定块3在所述第一工作区域的机械特征点理论坐标组。
34、可选地,所述利用所述一次机械坐标转换矩阵根据所述标定块3在所述第一工作区域的机械特征点理论坐标组,计算所述标定块3在所述第二工作区域的机械特征点理论坐标组,包括:
35、从所述标定块3在所述第一工作区域的机械特征点理论坐标组中依次提取待转换机械特征点坐标;
36、利用所述一次机械坐标转换矩阵依次计算所述待转换机械特征点坐标为在所述第二工作区域的机械特征点坐标,得到所述标定块3在所述第二工作区域的机械特征点理论坐标组。
37、可选地,所述将所述标定块3在所述第二工作区域的机械特征点理论坐标组及所述机械特征点实际坐标组输入所述标定运算工具中计算,得到二次机械坐标校准矩阵,包括:
38、从所述标定块3在所述第二工作区域的机械特征点实际坐标组中依次提取所述标定块3的每一个特征点的机械特征点实际坐标;
39、从所述标定块3在所述第二工作区域的机械特征点理论坐标组中依次提取所述标定块3的每一个机械特征点实际坐标对应的机械特征点理论坐标;
40、计算所述标定块3的每一个特征点的机械特征点实际坐标与对应的所述机械特征点理论坐标的校准误差;
41、根据所述标定块3的每一个特征点的校准误差,计算所述二次机械坐标校准矩阵。
42、为了解决上述问题,本发明还提供一种不同机器人之间数据转换后二次校准的装置,所述装置包括:
43、3d-机械坐标转换矩阵计算模块,用于获取预构建的标定块1在预定的第一工作区域的3d特征点坐标组;移动预构建的机器人1的定位探针至所述标定块1的特征点,得到第一机械特征点实际坐标组;根据所述标定块1在所述第一工作区域的3d特征点坐标组及所述第一机械特征点实际坐标组,利用预构建的标定运算工具,计算得到所述机器人1的3d-机械坐标转换矩阵;
44、一次机械坐标转换矩阵计算模块,用于分别获取预构建的标定块2在所述第一工作区域及预定的第二工作区域内的第一机械特征点转换坐标组及第二机械特征点转换坐标组;将所述第一机械特征点转换坐标组及第二机械特征点转换坐标组输入所述标定运算工具中进行计算,得到一次机械坐标转换矩阵;
45、二次机械坐标校准矩阵校准模块,用于获取所述第一工作区域内的标定块3的特征点坐标,得到所述标定块3在所述第一工作区域的3d特征点坐标组;利用所述3d-机械坐标转换矩阵将所述标定块3在所述第一工作区域的3d特征点坐标组转换为所述标定块3在所述第一工作区域的机械特征点理论坐标组;利用所述一次机械坐标转换矩阵根据所述标定块3在所述第一工作区域的机械特征点理论坐标组,计算所述标定块3在所述第二工作区域的机械特征点理论坐标组;移动预构建的机器人2的定位探针至所述第二工作区域的所述标定块3的特征点,得到所述标定块3在所述第二工作区域的机械特征点实际坐标组;将所述标定块3在所述第二工作区域的机械特征点理论坐标组及所述机械特征点实际坐标组输入所述标定运算工具中计算,得到二次机械坐标校准矩阵,利用所述二次机械坐标校准矩阵对所述机器人2进行二次校准,完成不同机器人之间数据转换后二次校准。
46、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
47、至少一个处理器;以及,
48、与所述至少一个处理器通信连接的存储器;其中,
49、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以实现上述所述的不同机器人之间数据转换后二次校准的方法。
50、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的不同机器人之间数据转换后二次校准的方法。
51、相比于背景技术所述机器人的校准方式存在较大的误差,且需要耗费较大的人力的问题,本发明实施例在实现不同机器人之间数据转换后的二次校准时,分为三步,第一步通过标定块1获取所述机器人1的3d-机械坐标转换矩阵,在获得所述机器人1的3d-机械坐标转换矩阵的过程中,首先获得标定块1在预定的第一工作区域的3d特征点坐标组,再移动机器人1的定位探针至所述标定块1的特征点,得到第一机械特征点实际坐标组,最后根据所述第一工作区域的3d特征点坐标组及所述第一机械特征点实际坐标组计算得到所述机器人1的3d-机械坐标转换矩阵,在第二步中,需要利用标定块2在所述第一工作区域及预定的第二工作区域内的第一机械特征点转换坐标组及第二机械特征点转换坐标组,输入所述标定运算工具中进行计算,进而获取所述第一工作区域及预定的第二工作区域之间的一次机械坐标转换矩阵,在第三步中,需要同时利用所述机器人1的3d-机械坐标转换矩阵及一次机械坐标转换矩阵,首先需要获取标定块3在所述第一工作区域的3d特征点坐标组,再利用所述3d-机械坐标转换矩阵将所述标定块3在所述第一工作区域的3d特征点坐标组转换为第一工作区域的机械特征点理论坐标组,再利用所述一次机械坐标转换矩阵计算所述第一工作区域的机械特征点理论坐标组在所述第二工作区域的机械特征点理论坐标组,最后根据所述第二工作区域的机械特征点实际坐标组对所述第二工作区域的机械特征点理论坐标组进行校准,得到所述二次机械坐标校准矩阵,,利用所述二次机械坐标校准矩阵对所述机器人2进行二次校准,完成不同机器人之间数据转换后二次校准。因此本发明提出的不同机器人之间数据转换后二次校准的方法、装置、电子设备及计算机可读存储介质,其主要目的在于解决机器人的校准方式存在较大的误差,且需要耗费较大的人力的问题。
- 还没有人留言评论。精彩留言会获得点赞!