一种机器人执行端用铰接式夹具的制作方法
本技术涉及机器人领域,尤其涉及一种机器人执行端用铰接式夹具。
背景技术:
1、随着自动化技术的快速发展,机器人用夹具或夹爪已经渗透进各行各业,其主要作用是代替人工的抓取工作,可有效地提高生产效率及工作的安全性。在精密加工领域,越来越多的人工操作被替代为自动化操作,以达到更高的精度要求和生产效率,工件在不同工位间的转换,经常需要用到夹具或夹爪来实现。
2、现有的机器人用夹具,多是采用气动式的,气动式夹具一般只适用于固定种类的工件,原因在与气动式夹具的夹持力是固定的,在调整夹持力度时只能通过调节气缸的力来实现,在同一次生产中不能气动式夹具不能随意切换以适应不同的工件。
技术实现思路
1、本实用新型的目的是提供一种机器人执行端用铰接式夹具。
2、为实现上述目的,采用以下方案。
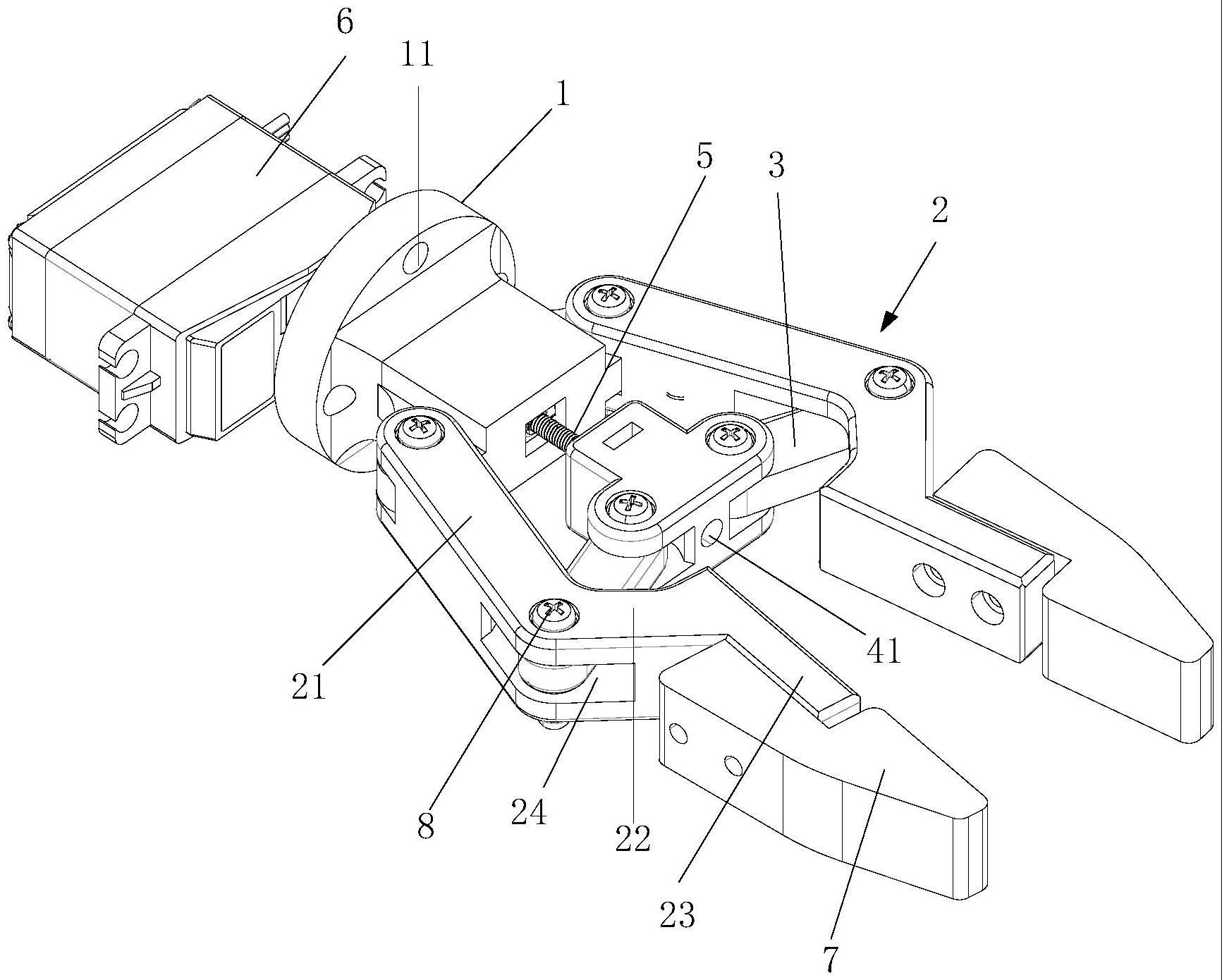
3、一种机器人执行端用铰接式夹具,包括安装座,所述安装座上铰接有两个相互对称设置的夹持臂,所述夹持臂包括一体形成的延长部、弯曲部和夹持部,两个所述夹持臂的所述延长部和所述弯曲部的交接处分别与一连接臂的一端铰接,两个所述连接臂的另一端连接至连接座,所述连接座中具有通孔,所述通孔内设置有一丝母,所述丝母与一丝杆的一端连接,所述丝杆穿过所述安装座设置,且所述丝杆的另一端与执行电机连接。
4、进一步的,所述安装座上设置有安装孔。使得本夹具可以安装在机器人的执行端上使用。
5、进一步的,所述夹持部上设置有橡胶夹持头,任一所述橡胶夹持头朝向另一所述橡胶夹持头的一面与所述夹持部平齐。橡胶夹持头在夹持工件时可以保护工件,且还可以通过更换橡胶夹持头来进行改造。
6、进一步的,所述延长部和所述弯曲部的交接处设置有中通的通槽,所述连接臂铰接于所述通槽内。将连接臂与夹持臂的连接处隐藏在通槽内,可以缩小本夹具的尺寸。
7、进一步的,所述夹持臂与所述连接臂、所述连接臂与所述连接座、所述夹持臂与所述安装座均通过螺栓和螺母铰接。易于安装和生产。
8、本实用新型的技术方案具有以下有益效果:
9、通过设置丝杆、执行电机、连接座、连接臂和夹持臂,夹持臂的开合过程是由执行电机决定的,执行电机是可以编程实现夹持臂的开合程度的随意变换的,进而,本实用新型在一次生产中可以用于夹持不同厚度的工件,提高了夹具的使用率,以减少生产成本。
技术特征:
1.一种机器人执行端用铰接式夹具,其特征在于,包括安装座,所述安装座上铰接有两个相互对称设置的夹持臂,所述夹持臂包括一体形成的延长部、弯曲部和夹持部,两个所述夹持臂的所述延长部和所述弯曲部的交接处分别与一连接臂的一端铰接,两个所述连接臂的另一端连接至连接座,所述连接座中具有通孔,所述通孔内设置有一丝母,所述丝母与一丝杆的一端连接,所述丝杆穿过所述安装座设置,且所述丝杆的另一端与执行电机连接。
2.根据权利要求1所述的机器人执行端用铰接式夹具,其特征在于,所述安装座上设置有安装孔。
3.根据权利要求1所述的机器人执行端用铰接式夹具,其特征在于,所述夹持部上设置有橡胶夹持头,任一所述橡胶夹持头朝向另一所述橡胶夹持头的一面与所述夹持部平齐。
4.根据权利要求1所述的机器人执行端用铰接式夹具,其特征在于,所述延长部和所述弯曲部的交接处设置有中通的通槽,所述连接臂铰接于所述通槽内。
5.根据权利要求1所述的机器人执行端用铰接式夹具,其特征在于,所述夹持臂与所述连接臂、所述连接臂与所述连接座、所述夹持臂与所述安装座均通过螺栓和螺母铰接。
技术总结
本技术公开一种机器人执行端用铰接式夹具,包括安装座,安装座上铰接有两个相互对称设置的夹持臂,夹持臂包括一体形成的延长部、弯曲部和夹持部,两个夹持臂的延长部和弯曲部的交接处分别与一连接臂的一端铰接,两个连接臂的另一端连接至连接座,连接座中具有通孔,通孔内设置有一丝母,丝母与一丝杆的一端连接,丝杆穿过安装座设置,且丝杆的另一端与执行电机连接。本技术通过设置丝杆、执行电机、连接座、连接臂和夹持臂,夹持臂的开合过程是由执行电机决定的,执行电机是可以编程实现夹持臂的开合程度的随意变换的,进而,本技术在一次生产中可以用于夹持不同厚度的工件,提高了夹具的使用率,以减少生产成本。
技术研发人员:张辉,段万胜,韦令勤,张耀春
受保护的技术使用者:深圳市华钧科技发展有限公司
技术研发日:20221228
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!