信息处理装置、远程操作系统和信息处理方法与流程
本公开内容涉及信息处理装置、远程操作系统和信息处理方法。
背景技术:
1、已知通过主从控制方法来控制远程位置处的从属装置的系统。专利文献1公开了如下技术,该技术用于确定主装置与从属装置之间的数据传输是正常还是异常,在数据传输正常的情况下根据命令值控制从属装置的操作,并且在数据传输异常的情况下根据预测的命令值控制从属装置的操作。
2、引用列表
3、专利文献
4、专利文献1:jp2019-217557a
技术实现思路
1、技术问题
2、在常规技术中,在操作者远程控制作为从属装置的机器人的运动的情况下,可执行的任务受到操作者的技能水平和操作技能以及输入装置的性能的限制,并且难以顺利地操作机器人。
3、因此,本公开内容提供了能够通过操作者的远程操作来提高操作单元的可操作性的信息处理装置、远程操作系统和信息处理方法。
4、问题的解决方案
5、为了解决上述问题,根据本公开内容的一个实施方式的信息处理装置包括:预测单元,其基于操作单元执行的动作和能够识别工作步骤的步骤信息,预测操作单元根据远程操作在下一个步骤中要执行的下一个动作;以及运动控制单元,其基于预测出的下一个动作、关于远程操作的操作信息以及操作单元要操作的对象之间的关系控制操作单元,以辅助操作单元的远程操作。
6、为了解决上述问题,根据本公开内容的一个实施方式的远程操作系统包括:操作单元;信息处理装置;以及操作装置,其远程操作操作单元,其中,信息处理装置包括:预测单元,其基于操作单元执行的动作和能够识别工作步骤的步骤信息,预测操作单元根据远程操作在下一个步骤中要执行的下一个动作;以及运动控制单元,其基于预测出的下一个动作、关于远程操作的操作信息以及操作单元要操作的对象之间的关系控制操作单元,以辅助操作单元的远程操作。
7、为了解决上述问题,根据本公开内容的一个实施方式的信息处理方法由计算机执行,该方法包括:基于操作单元执行的动作和能够识别工作步骤的步骤信息,预测操作单元根据远程操作在下一个步骤中要执行的下一个动作;以及基于预测出的下一个动作、关于远程操作的操作信息以及操作单元要操作的对象之间的关系控制操作单元,以辅助操作单元的远程操作。
技术特征:
1.一种信息处理装置,包括:
2.根据权利要求1所述的信息处理装置,还包括:
3.根据权利要求2所述的信息处理装置,其中,
4.根据权利要求1所述的信息处理装置,其中,
5.根据权利要求1所述的信息处理装置,其中,
6.根据权利要求1所述的信息处理装置,其中,
7.根据权利要求1所述的信息处理装置,其中,
8.根据权利要求1所述的信息处理装置,其中,
9.根据权利要求1所述的信息处理装置,其中,
10.根据权利要求1所述的信息处理装置,其中,
11.根据权利要求1所述的信息处理装置,其中,
12.一种远程操作系统,包括:
13.根据权利要求12所述的远程操作系统,其中,
14.一种由计算机执行的信息处理方法,所述方法包括:
技术总结
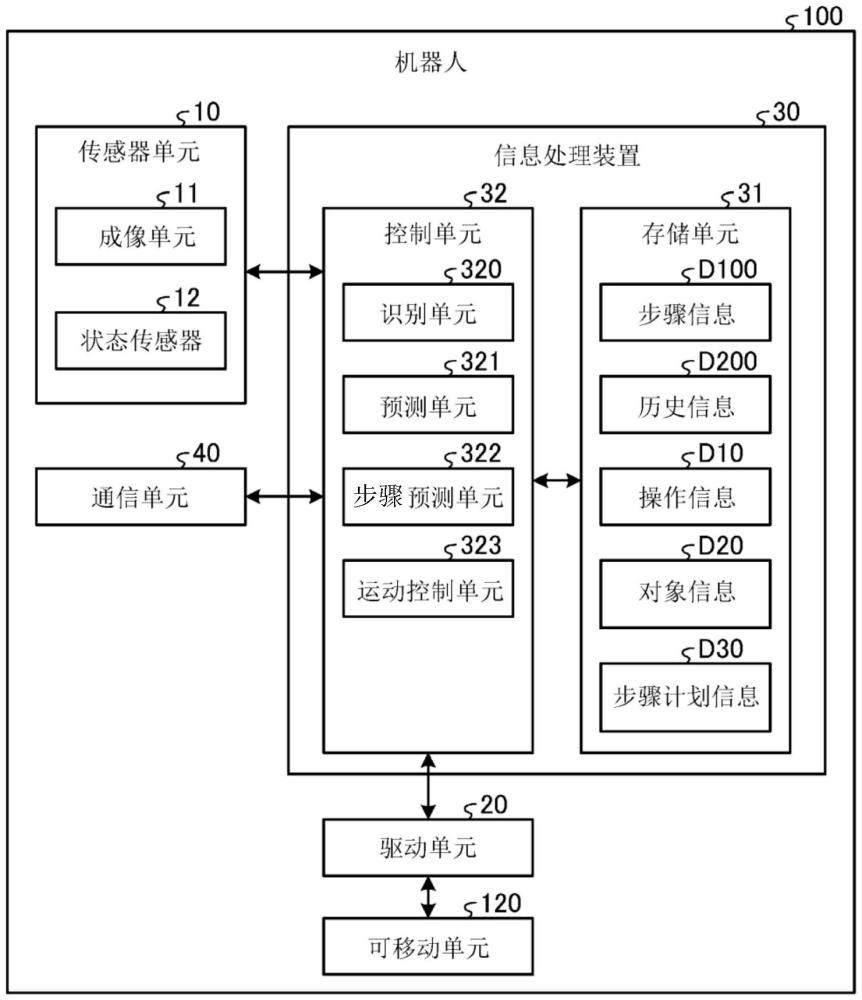
信息处理装置(30)包括:预测单元(321),其基于操作单元(120)执行的动作和能够识别工作步骤的步骤信息(D100),预测操作单元(120)根据远程操作在下一个步骤中要执行的下一个动作;以及运动控制单元(323),其基于预测的下一个动作、关于远程操作的操作信息(D10)与操作单元(120)要操作的对象之间的关系控制操作单元(120),以辅助操作单元(120)的远程操作。
技术研发人员:帕维尔·阿多丁
受保护的技术使用者:索尼集团公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!