校准机器人的方法与流程
本发明涉及一种用于校准机器人的方法。
背景技术:
1、机器人与机床和/或生产机器之间的协作例如在加工工件时有利的。例如,在机器人的帮助下,机床和/或生产机器上的流程能够实现自动化,否则必须手工完成。这有时包括装载和卸载过程。
2、但是,由于这种合作,机床和/或生产机器本身不太适合的工作步骤,特别是工件要保持在夹紧状态时,也能够成功执行。例如,这些是后处理步骤,例如去毛刺。
3、然而,与设计相关的机器人机械精度较低,使得这种协作变得困难。
4、wo 2005/084895 a1涉及一种用于测量工业机器人的工具的操作点的方法。ep1152 212b1中描述了一种校准方法。这里的缺点是需要光学测量装置来进行测量。
5、jp 2011048467 a公开了一种机械加工系统,该机械加工系统具有由机床控制器控制的机床和由机器人控制器控制的机器人以在机床上执行工作。该加工系统具备数据获取装置,该数据获取装置具有用于获取设置在机器人坐标系中的机器人的规定的可动部上的额定值p的数据获取单元。加工系统还包括:测量装置,用于测量额定点p在机床坐标系中的位置;以及相对关系导出装置,用于基于该数据采集装置采集的数据和测量装置测量的位置数据导出机器人坐标系和机床坐标系之间的相对关系。
6、ep 3418 838a1公开了一种电火花切割加工系统,包括:电极移动控制单元,用于移动线电极,同时保持线电极平行于z1轴,以使线电极与基准件接触,同时移动线电极相对于zl轴保持倾斜;电极位置检测单元,用于检测线电极接触基准件时线电极在xi y1 zi直角坐标系中的位置;位置检测单元,用于检测线电极接触基准件时基准件在正交x2y2z2坐标系中的位置;相对位置关系计算器,用于基于检测到的位置计算坐标系之间的相对位置关系。
7、de 102016 011 653a1公开了一种廉价且能够容易地测量目标点的位置的机器人系统。当目标位于机器人坐标系中已知的第一目标位置时,系统将拍摄图像中包括的目标的图像的特征尺寸存储为参考数据,并将相对于臂端的第一目标位置存储为位置的工具中心。系统将目标位于第二目标位置时从拍摄图像中获得的特征尺寸与参考数据的特征尺寸进行比较以引起臂端移动,并且参考数据的特征尺寸引起臂端移动,并根据移动后的臂端位置对应的第二机器人位置以及工具中心的位置计算机器人坐标系中的第二目标位置。
8、de 102015 015 094a1公开了一种由机器人和机床组成的协作系统,其目的在于获得一种精度高、结构简单的坐标转换装置,通过该装置将机器人坐标系转换为机器坐标系。通过将机器坐标系平移得到的基础坐标系中的三个校准标记的坐标值定义初步坐标系,并根据初步坐标系和基础坐标系计算坐标变换矩阵。通过用相机记录标记在机器人坐标系中的位置。根据机器人坐标系中的三个坐标值,计算从机器人坐标系到初步坐标系的坐标变换矩阵,从机器人坐标系计算到基础坐标系的坐标变换矩阵基于上述第二矩阵的坐标系。
技术实现思路
1、本发明基于改进机器人与机床和/或生产机器之间的协作的目的。
2、该目的通过权利要求1实现,即一种用于校准机器人的方法,其中机器人的工作空间与机床和/或生产机器的工作空间至少部分地重叠,其中移动机器人,使得机器人的参考点位于机床和/或生产机器的工作空间内的第一位置处,其中机器人在第一位置处的第一位置值与机床和/或生产机器在该位置处的第一位置值进行比较,其中,在机器人的第一位置值与机床和/或生产机器的第一位置值不同时,对机器人的第一位置值进行校准或者对机床和/或生产机器的第一位置值进行校准,使得机器人的第一位置值和机床和/或生产机器的第一位置值相同。
3、在优选实施例中,机器人的第一位置值被校正。
4、这是有利的,因为机床和/或生产机器通常比机器人具有更高的精度。对于机器人,特别是工业机器人,能够实现的绝对静态精度的典型数量级是大约1mm,对于机床和/或生产机器来说大约是10μm。
5、本发明提供的优点是,例如通过3d测量装置对机器人、特别是机器人机械装置进行的耗时且昂贵的校准是不必要的,该3d测量装置例如能够检测机器手(有利地具有工具中心点,简称tcp)的位置。使用本发明能够快速且廉价地进行校准。
6、本发明的优点还在于能够在使用过程中重复执行校准。
7、与当前的标准校准相比,这是一个主要优势,当前的标准校准通常仅在调试期间进行。
8、通过这种方式,能够纠正随着使用时间累积的错误。
9、一个设计方案是有利的,即位置值具有第一坐标、第二坐标和第三坐标。
10、优选使用具有三个轴(x轴、y轴、z轴)的坐标系。
11、典型但非强制的是使用正交坐标系,尤其是笛卡尔坐标系。
12、一个设计方案是有利的,即移动机器人,使得机器人的参考点位于机床和/或生产机器的工作空间内的第二位置处,其中机器人在第二位置处的第二位置值与机床和/或生产机器在该位置处的第二位置值进行比较,其中当机器人的第二位置值与机床和/或生产机器的第二位置值不同时,对机器人的第二位置值进行校正,或者对机床和/或生产机器的第二位置值进行校正,使得机器人的第二位置值和机床和/或生产机器的第二位置值相同。
13、在优选设计方案中,机器人的第一位置值被校正。
14、一种设计方案是有利的,即基于机器人或机床和/或生产机器中的已校正的第一位置值以及机器人或机床中的已校正的第二位置值通过内插法或外推法来确定第三位置值。
15、这使得能够对那些没有进行单独校准的点进行良好的估计。
16、本发明能够显著提高机器人在机床工作空间内的精度,特别是机器人与机床和/或生产机器彼此之间的相对精度。在机床工作空间之外机器人精度的任何轻微下降都是能够接受的。
17、因此,更精确的机床和/或生产机器能够用作不太精确的机器人的测量标准。
18、一个设计方案是有利的,即移动机器人,使得机器人的参考点位于机床和/或生产机器的工作空间内的多个位置处。
19、参考点有利地位于按时间顺序的多个位置处。
20、换句话说,这有利地意味着:首先接近点a,然后接近点b。然后,例如能够逼近c点。
21、两个或多个位置是有利的。
22、一个有利的设计方案在于,多个位置布置成网格和/或阵列形状,或者其中多个位置布置成使得这些位置处于或接近待加工工件的关键点。
23、关键点的示例包括:角落和/或边缘。
24、角落和边缘是有利的,因为它们易于测量。
25、参考点有利地位于机器人与机床和/或生产机器之间的对应性特别重要的地方。
26、一个实例在于:当机器人对边缘进行去毛刺时,测量边缘是有利的。
27、另一个例子涉及组件的组装:如果机器人将一个组件插入另一个组件中,则测量为此目的提供的凹槽、配合等是有利的。
28、这样做的优点是能够精确处理关键点。
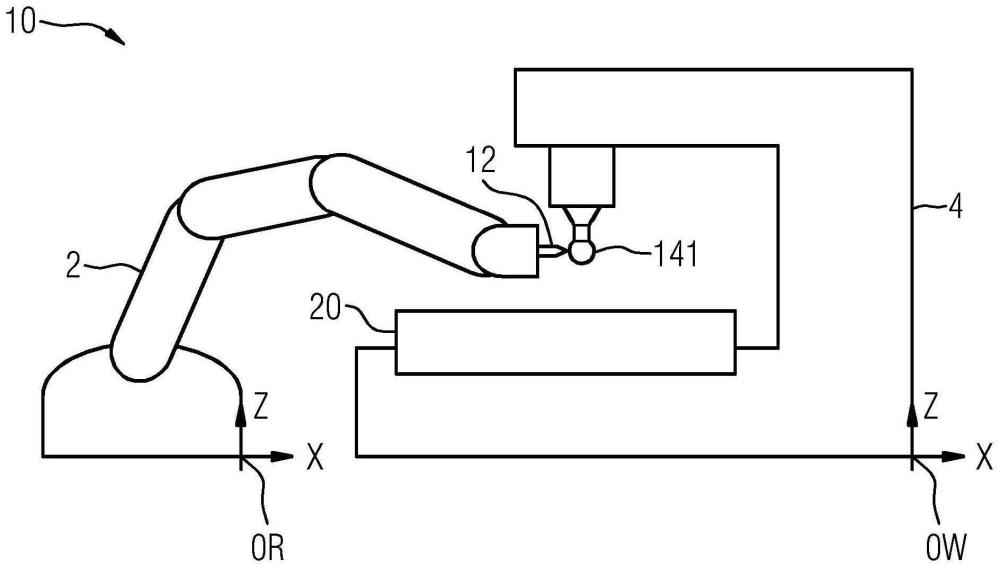
29、根据将机器人的参考点布置在机器人的端部执行器上的实施例是有利的。
30、工具中心点有利地位于机器人的端部执行器处。
31、机床和/或生产机器还有利地具有参考点。该参考点也能够称为工具中心点。它有利地位于布置在机床和/或生产机器的主轴上的工具的穿透点处。
32、一个设计方案是有利的,即移动机器人,使得机器人的参考点位于机床和/或生产机器的工作台上的位置处,例如在机床和/或生产机器的工作台的角落处。
33、这里有利的是,在机床和/或生产机器的工作空间内存在大量位置已知的点。这些包括例如工作台的表面以及刀尖的位置。
34、该工具还能够是特别精确的测量工具或传感器探头。
35、机器人能够通过例如引导传感器探头或距离测量装置本身,或者通过建立机械接触来接近位置或点(这例如通过偏转工具和/或产品的传感器探头来实现机器或移动到固定停止点),并记录其tcp在这些点在空间中的位置值(特别是使用三个坐标x、y、z)。
36、机床和/或生产机器针对这些点测量的空间位置值的差异有利地被认为是需要在这些点处补偿的机器人机械装置中的误差。因此,机床和/或生产机器能够用作测量装置。
37、机床和/或生产机器本身与理想的、无错误的机床和/或生产机器相比的误差没有影响,因为机器人和机床和/或生产机器之间的协作本质上取决于两者的相对精度。
38、一种设计方案是有利的,即移动机器人,使得机器人的参考点位于机床和/或生产机器的主轴上。
39、一个设计方案是有利的,即与工作台和/或主轴的接触通过存在于机器人的端部执行器之上和/或之中的传感器探头来检测。
40、机器人能够移动到工作台直到发生接触,优选地是机械接触。工作台表面作为比较两个坐标系的参考。在第一次调整之后,能够通过移动到机床和/或生产机器上的进一步已知点来纠正机器人机械装置中的几何误差。
41、一个设计方案是有利的,即通过存在于主轴上和/或主轴中的传感器探头来检测与主轴的接触。
42、传感器探头还能够布置在机床和/或生产机器的刀架中。
43、为此目的,机床和/或生产机器的主轴有利地具有至少一个传感器探头。机器人接近它。传感器探头有利地检测接触。千分表的偏转用作比较机器人和机床和/或生产机器的两个坐标系的参考。
44、在该第一次比较之后,机床和/或生产机器的主轴有利地移动至至少一个另外的位置,并且重复所描述的过程。
45、如果这些点充分覆盖公共工作空间,如上所述,这些支撑点可用于内插法或外推法工作空间中其他未测量点处的误差。所得到的特性图有利地用于将补偿值馈送到机器人在机床和/或生产机器的工作空间内的运动,使得从机床和/或生产机器的角度来看,机器人更能到达所需的位置。这意味着,例如,机器人在加工过程中执行的轮廓在工件上保持得更加精确。
46、测量位置值的另一种计算包括校正机器人力学的几何特征,特别是关节相对于彼此的精确位置、关节之间的机器人臂节段的尺寸和/或依赖于负载的偏转。
47、例如,这能够通过基于机器人的运动学变换方程建立超定方程组来实现。例如,能够使用最小二乘法来实现解决方案。特别有利的是,在机器人制造商没有在出厂时纠正(如上所述)机械误差(特别是与理想几何形状的偏差)并且机床和/或生产机器的工作空间足够大以使得关节充分偏转,那么错误也变得可见。
48、这样,在机床和/或生产机器的工作空间之外也能够提高机器人的精度。
49、如果工作空间中测量位置的位置误差没有变为零,则能够在测量值的替代计算之后进行第二遍,以对此进行补偿。例如,通过使用几何校正的机器人力学移动到所有测量位置并使用首先提到的补偿方法消除剩余误差。
50、机床和/或生产机器与机器人之间的比较不限于笛卡尔坐标(x、y、z)的评估。
51、在本发明的另一有利设计方案中,还能够确定和计算机床和/或生产机器和机器人相对于彼此的角位置。这意味着不仅定位能够达成一致,方向也能够达成一致。
52、上述目的的解决方案也能够通过权利要求12来实现,即一种用于执行该方法的系统,包括机器人以及机床和/或生产机器,该系统布置成使得机器人的工作空间与机床和/或生产机器的工作空间至少部分地重叠。
53、上述目的的解决方案也能够通过权利要求13来实现,即使用机床和/或生产机器作为测量工具,该机床和/或生产机器具有优选在主轴上和/或主轴中的传感器探头。
- 还没有人留言评论。精彩留言会获得点赞!