机器人控制设备、机器人控制系统和机器人控制方法与流程
本公开涉及机器人控制设备、机器人控制系统和机器人控制方法。
背景技术:
1、以往,已知的机器人控制设备基于作业目标的位置对齐标记的图像识别处理来创建教导数据(参见例如专利文献1)。
2、引文列表
3、专利文献
4、专利文献1:日本未审查专利申请公开no.5-301183
技术实现思路
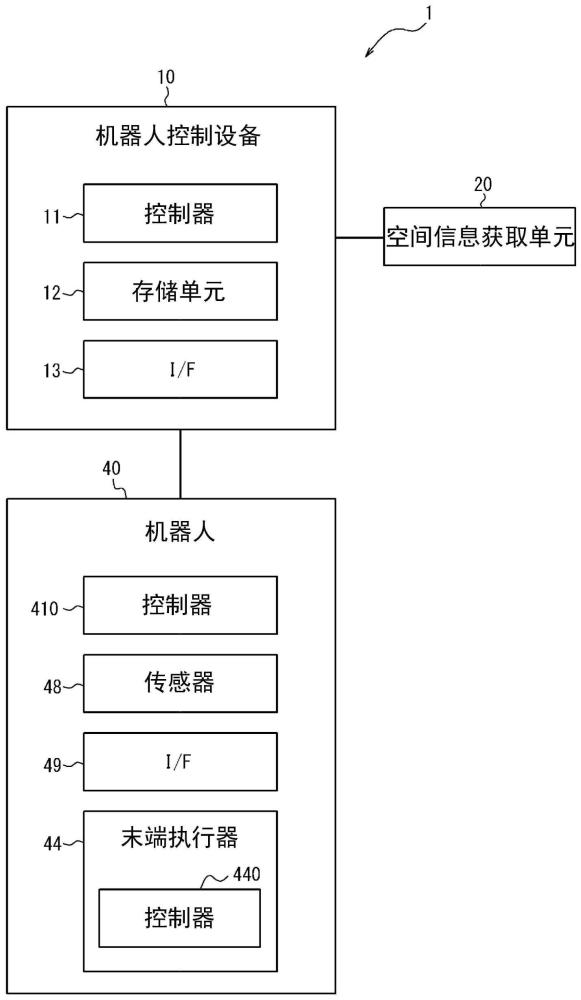
1、在本公开的实施例中,一种机器人控制设备包括控制器。该控制器被配置为控制机器人。该机器人包括传感器和末端执行器。该控制器被配置为:获取末端执行器相对于设置在机器人的操作空间内部的测量目标的位置信息,并且基于该位置信息来校正与机器人的操作相关的坐标系。
2、在本公开的实施例中,一种机器人控制系统包括机器人控制设备和机器人。
3、在本公开的实施例中,一种机器人控制方法是用于控制包括传感器和末端执行器在内的机器人的方法。该机器人控制方法包括:获取末端执行器相对于设置在机器人的操作空间内部的测量目标的位置信息,并且基于该位置信息来校正与机器人的操作相关的坐标系。
技术特征:
1.一种机器人控制设备,包括:
2.根据权利要求1所述的机器人控制设备,
3.根据权利要求2所述的机器人控制设备,
4.根据权利要求1至3中任一项所述的机器人控制设备,
5.根据权利要求1至4中任一项所述的机器人控制设备,
6.根据权利要求1至5中任一项所述的机器人控制设备,
7.根据权利要求6所述的机器人控制设备,
8.根据权利要求1至4中任一项所述的机器人控制设备,
9.根据权利要求8所述的机器人控制设备,
10.根据权利要求1至9中任一项所述的机器人控制设备,
11.根据权利要求10所述的机器人控制设备,
12.根据权利要求1至10中任一项所述的机器人控制设备,
13.一种机器人控制系统,包括:
14.一种用于控制机器人的机器人控制方法,所述机器人包括传感器和末端执行器,所述机器人控制方法包括:
技术总结
机器人控制设备包括控制器,该控制器控制包括传感器和末端执行器在内的机器人。该控制器被配置为:获取末端执行器相对于设置在机器人的操作空间内部的测量对象的位置信息;以及基于位置信息来校正与机器人的操作相关的坐标系。
技术研发人员:内竹真洋,费德利亚·格拉西亚,森雅人,石田敬之,宫村博昭
受保护的技术使用者:京瓷株式会社
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!