一种变刚度机器人关节
本发明涉及机器人变刚度关节领域,具体涉及一种变刚度机器人关节。
背景技术:
1、随着机器人技术的不断发展,机器人应用的范围也越来越广泛,人机交互的场面也越来越多。为保障在人机协同工作过程中工人的安全、减少意外事故的发生,迫切需要一种能够应用于人机协作环境中,并对环境友好、对工人安全的机器人系统。然而,在工业机器手臂、仿生多足机器人、机械外骨骼以及康复医疗假肢等关节机器人的研究中,机器人关节设计普遍采用电机输出轴与关节机构进行刚性连接的驱动方式,这种刚性连接方式使关节在受到冲击时没有缓冲,加速度大,极易对机器人或人造成损伤。
2、在人类步行的研究中发现以下现象:在摆动腿落地前腿部肌肉会放松以吸收冲击,而在摆动腿落地后的双脚支撑中,腿部肌肉收缩以维持平衡。通过这种机制,人类在快速行走和跑步过程中可以有效降低冲击保持稳定,变刚度关节能够使机器人系统像人类肌肉一样,在遇到冲击的时候能够适当变化刚度,从而缓冲碰撞产生的能量,达到保护机器和人员的作用。因此研究刚度可变化的关节,成为机器人的一个热门,可以推动工业、多足、外骨骼、假肢等机器人领域的发展。公布号为cn206561438u的中国发明专利申请公开了一种基于弹簧片的刚度连续可调的机器人柔性关节,但此种结构变化刚度需要驱动装置,反应速度较慢且结构复杂,且随着机器人与人类的接触越来越密切,提高人机交互安全性成为未来机器人设计的首要因素,这就要求机器人的变刚度关节不能局限于上述结构形式,需要设计变刚度关节的另一种结构形式,去吸收外部的冲击,保护关节和人体,使关节无需驱动即可改变刚度。
技术实现思路
1、本发明的主要目的是提供一种无需驱动即可改变刚度的变刚度机器人关节。
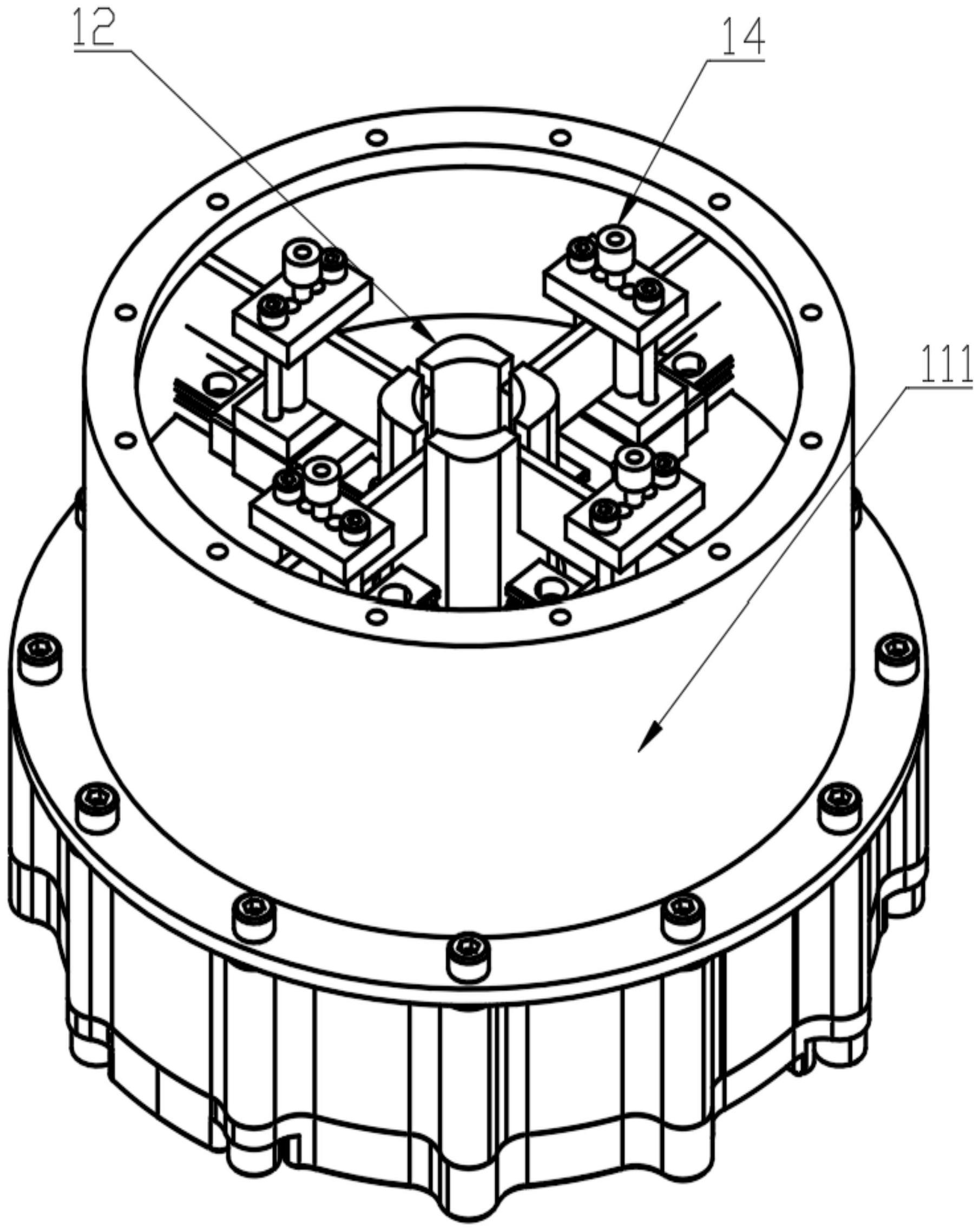
2、为实现上述目的,本发明提出的变刚度机器人关节包括变刚度机构;包括变刚度机构;所述变刚度机构包括壳体、传动轴、弹性梁和滑动件,所述传动轴转动穿设在所述壳体内,所述弹性梁一端与所述传动轴连接,所述弹性梁的另一端向背离所述传动轴轴线的方向延伸且为自由端,所述滑动件能够滑动地套设于所述弹性梁,且所述滑动件与所述壳体连接,在所述壳体作用于所述滑动件的作用力达到预设程度时,所述滑动件用于沿所述弹性梁滑动以改变所述弹性梁的有效长度,从而改变所述机器人关节的刚度。
3、优选地,所述壳体包括筒体和盖板,所述筒体轴线与所述传动轴轴线共线,所述盖板设置在所述筒体任一端,所述筒体未设置盖板的一端设置开口以使所述传动轴穿入所述筒体内部空间。
4、优选地,所述滑动件包括引导元件和滑动元件,所述滑动元件套设在所述引导元件,所述引导元件的引导方向背离所述传动轴,所述引导元件一端与所述筒体侧壁连接,另一端朝向所述传动轴延伸,所述滑动元件套设在弹性梁上能够沿引导方向滑动,所述滑动元件沿引导方向滑动的时候能改变刚度。
5、优选地,所述滑动元件包括支撑座和辊轮,所述支撑座呈中空结构,所述辊轮设置在所述支撑座内,贴合在所述弹性梁两侧与所述弹性梁滚动配合。
6、优选地,所述滑动元件还包括滑动单元,所述盖板设置有弧形滑道,所述弧形滑道一端朝向所述传动轴,另一端朝向所述筒体侧壁,所述滑动单元连接于支撑座,所述滑动单元与所述滑道配合滑动。
7、优选地,所述弧形滑道包括锁止段和变刚度段,所述锁止段用于通过弧形走向对所述滑动元件形成锁止,所述变刚度段用于引导所述滑动元件背离所述传动轴方向滑动。
8、优选地,还包括驱动机构和控制机构,所述驱动机构与所述传动轴连接以向所述传动轴传递力矩,所述控制机构设置在所述驱动机构背离所述变刚度机构的一端,用于控制所述驱动机构的转动。
9、优选地,所述壳体背离所述驱动机构的一端外壁形成有输出端,所述输出端用于与外部力矩传递结构连接。
10、优选地,所述弹性梁和滑动件设置有多组并且数量对应,所述多组弹性梁和多组滑动件环绕所述传动轴设置。
11、优选地,所述弧形滑道设置有多个,数量与所述弹性梁对应,所述多个弧形滑道朝向所述传动轴的一端互相连通。
12、综上所述,本发明提出的一种一种变刚度机器人关节,设置有变刚度机构;在关节受到冲击时,冲击力使所述变刚度机构的壳体转动,壳体上设置的弧形滑道与和滑动元件呈锁止状态,带动滑动元件以及同滑动元件连接的弹性梁一起转动,当冲击力过大时,弧形滑道与滑动元件锁止失效,滑动元件沿所述弧形滑道背离所述传动轴方向滑动,改变所述弹性梁的有效工作长度,从而达到改变刚度的效果,本发明提出的技术方案无需驱动即可改变刚度。
技术特征:
1.一种变刚度机器人关节,其特征在于,包括变刚度机构;所述变刚度机构包括壳体、传动轴、弹性梁和滑动件,所述传动轴转动穿设在所述壳体内,所述弹性梁一端与所述传动轴连接,所述弹性梁的另一端向背离所述传动轴轴线的方向延伸且为自由端,所述滑动件能够滑动地套设于所述弹性梁,且所述滑动件与所述壳体连接,在所述壳体作用于所述滑动件的作用力达到预设程度时,所述滑动件用于沿所述弹性梁滑动以改变所述弹性梁的有效长度,从而改变所述机器人关节的刚度。
2.根据权利要求1所述的变刚度机器人关节,其特征在于,所述壳体包括筒体和盖板,所述筒体轴线与所述传动轴轴线共线,所述盖板设置在所述筒体任一端,所述筒体未设置盖板的一端设置开口以使所述传动轴穿入所述筒体内部空间。
3.根据权利要求2所述的变刚度机器人关节,其特征在于,所述滑动件包括引导元件和滑动元件,所述滑动元件套设在所述引导元件,所述引导元件的引导方向背离所述传动轴,所述引导元件一端与所述筒体侧壁连接,另一端朝向所述传动轴延伸,所述滑动元件套设在弹性梁上能够沿引导方向滑动,所述滑动元件沿引导方向滑动的时候能改变刚度。
4.根据权利要求3所述的变刚度机器人关节,其特征在于,所述滑动元件包括支撑座和辊轮,所述支撑座呈中空结构,所述辊轮设置在所述支撑座内,贴合在所述弹性梁两侧与所述弹性梁滚动配合。
5.根据权利要求3所述的变刚度机器人关节,其特征在于,所述滑动元件还包括滑动单元,所述盖板设置有弧形滑道,所述弧形滑道一端朝向所述传动轴,另一端朝向所述筒体侧壁,所述滑动单元连接于支撑座,所述滑动单元与所述滑道配合滑动。
6.根据权利要求5所述的变刚度机器人关节,其特征在于,所述弧形滑道包括锁止段和变刚度段,所述锁止段用于通过弧形走向对所述滑动元件形成锁止,所述变刚度段用于引导所述滑动元件背离所述传动轴方向滑动。
7.根据权利要求6所述的变刚度机器人关节,其特征在于,还包括驱动机构和控制机构,所述驱动机构与所述传动轴连接以向所述传动轴传递力矩,所述控制机构设置在所述驱动机构背离所述变刚度机构的一端,用于控制所述驱动机构的转动。
8.根据权利要求7所述的变刚度机器人关节,其特征在于,所述壳体背离所述驱动机构的一端外壁形成有输出端,所述输出端用于与外部力矩传递结构连接。
9.根据权利要求8所述的变刚度机器人关节,其特征在于,所述弹性梁和滑动件设置有多组并且数量对应,所述多组弹性梁和多组滑动件环绕所述传动轴设置。
10.根据权利要求5-9任一项所述的变刚度机器人关节,其特征在于,所述弧形滑道设置有多个,数量与所述弹性梁对应,所述多个弧形滑道朝向所述传动轴的一端互相连通。
技术总结
本发明提供一种变刚度机器人关节,包括变刚度机构;所述变刚度机构包括壳体、传动轴、弹性梁和滑动件,所述传动轴转动穿设在所述壳体内,所述弹性梁一端与所述传动轴连接,所述弹性梁的另一端向背离所述传动轴轴线的方向延伸且为自由端,所述滑动件能够滑动地套设于所述弹性梁,且所述滑动件与所述壳体连接,在所述壳体作用于所述滑动件的作用力达到预设程度时,所述滑动件用于沿所述弹性梁滑动以改变所述弹性梁的有效长度,从而改变所述机器人关节的刚度。本发明旨在提供一种无需驱动装置即可改变刚度的的变刚度机器人关节。
技术研发人员:陆新江,许都,舒心,周秀
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!