一种模块化机械夹具及其应用的制作方法
本发明涉及机械夹具领域,更具体的,为一种模块化机械夹具及其应用。
背景技术:
1、现代化的生产加工过程对自动化和精细化的要求越来越高,现有技术中,用于实现抓取功能的机械夹具通常为与机械臂末端关节的法兰盘连接,用于控制和供电的线路和气动导管裸露在外部,造成维护成本较高,不便于拆卸安装,并且机械夹具受裸露在外部的线路和气动导管影响,其自由度受到很大的限制。即便是模块化的机械夹具,仍存在自由度受限并且装配和拆卸十分复杂的问题,无法满足多样化的应用场景,例如,倍福自动化有限公司在申请号为202080053383.2的发明专利中提到了一种模块化机器人臂,尽管集成了气、液路并将线路内置于壳体内,但其并未公开机械夹具的内部结构,其功能上是无法实现机械夹具的模块化应用。
2、为了解决上述问题,本发明提出了一种可与模块化机械臂配合使用的模块化机械夹具。
技术实现思路
1、本发明提供一种模块化机械夹具。
2、【关于模块化机械臂】
3、本发明包括一种高自由度内置式机电气一体的模块化机械臂,为l型模块化机械臂,所述l型模块化机械臂结构包括:呈直角分布的机械臂外壳1、端头4、插接公头2和插接母头3;所述插接公头2内包括电气滑环7和谐波电机8,所述电气滑环7的滑环定子72固定于机械臂外壳1和与所述外壳一体成型的第一支撑板5上,电气滑环7的滑环转子71固定于公头连接块9上,所述谐波电机8的电机转轴84穿过公头连接块9并与之固定,使得谐波电机8能独立控制公头连接块9和滑环转子71的转动,公头插接块10固定在所述公头连接块9上;所述插接母头3与插接公头2配合设置,包括与机械臂外壳1一体设置的第二支撑板6,与第二支撑板6抵接的环形压块15,所述环形压块15和母头连接块16接触,所述母头连接块16和第二支撑板6之间用第三轴承14活动连接,所述母头连接块16和机械臂外壳1之间用第二轴承17活动连接,母头插接块19固定在所述环形压块15之上,与所述公头插接块10配合设置,流体线路和信号线路贯穿所述插接公头2和插接母头3自由转动而不缠绕,所述流体线路用于通过气体或液体,所述信号线路用于传输电和/或信号指令。
4、进一步的,所述插接公头2部分包括机械臂外壳1,所述机械臂外壳1由金属、铝、钢、钛铝合金、高强度铝合金、aw7075、纤维增强塑料、玻璃纤维增强塑料(gfk)、碳纤维增强塑料(cfk)制成;所述机械臂外壳1在机械臂腔体内部一体成型有第一支撑板5,所述第一支撑板5与机械臂外壳1的配合设置可以固定电气滑环7的滑环定子72以及谐波电机8;所述谐波电机转轴84远离电机主体一侧为圆柱切边形,用于定位滑环动子71和滑环定子72,进入设于公头连接块9上的台阶限位孔96并与公头连接块9固定,使得公头连接块9能在谐波电机8的驱动下发生转动;所述公头连接块9与公头插接块10固定连接;所述公头连接块9与所述电气滑环7的滑环动子71固定连接,由此实现滑环动子71在谐波电机8带动下发生转动,而滑环定子72保持固定;所述滑环动子71上均匀分布有若干个流体进嘴75,滑环定子72上对称分布有若干流体出嘴76,气体由所述公头插接块10上的公头对插流道102经过流管孔93逐级密封接入到流体进嘴75,信号线路73由公头对插针101经过信号孔92接入滑环动子71,并由滑环定子72侧引出进入谐波电机8;所述滑环定子72远离滑环卡槽52的一侧由台阶形压块13包围紧固以确保电气滑环7整体不出现晃动;所述台阶形压块13与公头连接块9在相对应台阶部位设有第一轴承11,第一轴承11的动子侧与公头连接块9接触,第一轴承11的定子侧与台阶形压块13接触,为了防止第一轴承11的垂直移位,在第一轴承11和台阶形压块13的另一侧边之间加设第一卡簧12。
5、进一步的,所述机械臂外壳1与台阶形压块13通过第一连接螺钉1a结合,与端盖4通过第二连接螺钉1b结合;所述第一支撑板5上开设有流体通道51和滑环卡槽52以及滑环固定牙座53,所述滑环卡槽52用于将电气滑环7卡设在滑环卡槽52内部以限制滑环定子72在竖直方向上的移动,所述滑环固定牙座53上开设有第二滑环固定孔74c,滑环固定螺钉74a穿过机械臂外壳1上的第一滑环固定孔74b以及第二滑环固定孔74c紧固至滑环定子上的第三滑环固定孔74d,以限制滑环定子72在水平方向上的移动。
6、进一步的,所述第一支撑板5上开设有下沉螺纹过孔82b,紧固螺钉82a穿过下沉螺纹过孔82b进入电机定子上的紧固螺纹82c,上述设定可以将电机定子侧固定于所述第一支撑板的背侧,进而实现电机固定于外壳上;此外,紧固螺钉83a穿过设于电机法兰盘81上的转轴螺纹孔83b进入电机动子上的紧固螺纹83c,由此将电机转轴84接入电机动子侧,使得电机转轴84可以自由转动;所述电机转轴84的圆柱切边侧以转轴限位螺钉94a和转轴限位螺孔94b固定在公头连接块9上,电机转轴84的圆柱切边背侧以转轴紧固螺钉97a和转轴紧固螺孔97b固定在公头连接块9上,以实现电机转轴84与公头连接块9的固定,使得公头连接块9能在谐波电机8的驱动下发生转动。
7、进一步的,所述公头连接块9上设有与公头插接块10上的第一定位插孔91b配合连接的第一定位插销91a,公头连接块9和公头插接块10之间流体管道;所述公头连接块9上还设有供信号线穿过的信号孔92、供流体线路穿过的流管孔93以及公头对接螺牙95。
8、更进一步的,插接母头3部分包括扩口形状的机械臂外壳1,与机械臂外壳1一体设置的第二支撑板6,第二支撑板6上设有供流体线路通过的流体通道61和供信号线路通过的信号通道62;所述扩口形状的机械臂外壳1在扩口末端与母头连接块16在垂直于扩口延伸方向上的平台活动接触;所述机械臂外壳1的扩口内侧与母头连接块16外侧之间设置了第二轴承17,第二轴承17动子侧与母头连接块16外侧接触,第二轴承17定子侧与机械臂外壳1内侧接触,为使第二轴承17稳定,在第二轴承17一侧增设第二卡簧18;所述第二支撑板6在远离插接公头2的一侧具有两级台阶的形状,低级台阶与母头连接块16的远端以第三轴承14抵接,第三轴承14接触母头连接块16一侧为动子侧,第三轴承14接触第二支撑板6低级台阶一侧为定子侧;所述第二支撑板6的高级台阶为非圆形结构,其内设有信号通道62,高级台阶穿过环形压块15上的信号通道151并限制环形压块15的转动,信号线路穿过信号通道151后与母头插接块19上的母头对插针191连接;环形压块15上密封设有供流体线路穿过的流体通道152,流体通道152与母头插接块19上的母头对插流道192密封连接;环形压块15上还包括能与母头插接块19上的第二定位插销153a固定配合的第二定位插孔153b。
9、更进一步的,所述母头插接块19上设有母头对插定位193,当与上级模块化机械臂在公头对插块10上的公头对插定位103对插定位后,母头对插针191、母头对插流道192均与公头对插针101和公头对插流道102紧密连接,完成两级模块化机械臂的流体线路和信号线路的接通,当上级模块化机械臂的公头插接块10在谐波电机8的带动下发生转动时,下级模块化机械臂的母头插接块19将带动所有下级模块化机械臂转动。
10、根据本发明所述的一种高自由度内置式机电气一体的模块化机械臂,还可以为i型模块化机械臂,所述i形模块化机械臂省略了所述l形模块化机械臂的端头4和第二连接螺钉1b,所述第二支撑板6与所述第一支撑板5平行设置。
11、【关于模块机械臂组装】
12、根据本发明所述的一种高自由度内置式机电气一体的模块化机械臂组装,包括m节l形模块化机械臂和n节i型模块化机械臂拼接而成,通过上级模块化机械臂插接公头与下级模块化机械臂插接母头的配合,形成多节模块化机械臂组装结构,该组装结构两端可分别与机械臂基座和机械夹具连接。
13、进一步的,所述m+n≥1,其中,m为≥0的整数,n为≥0的整数。
14、【关于模块化机械夹具】
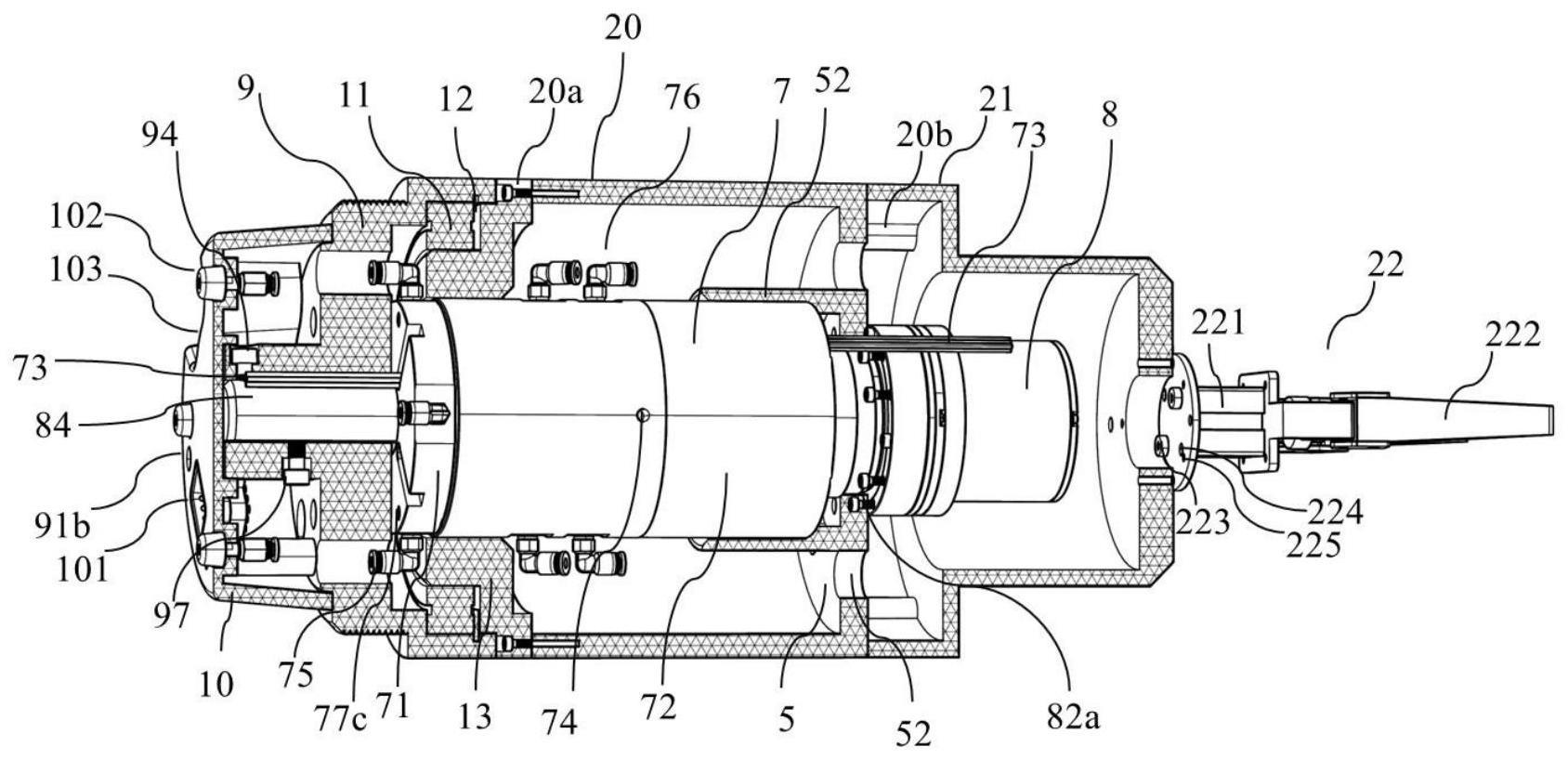
15、本发明还提供了一种与所述模块化机械臂及其组装配合使用的模块化机械夹具,所述模块化机械夹具结构包括:插接公头2、机械夹具外壳20、末端连接件21、末端工具22。插接公头2与模块化机械臂结构的插接公头2结构一致,所述插接公头2内包括电气滑环7和谐波电机8,所述电气滑环7的滑环定子72固定于机械夹具外壳20和与所述机械夹具外壳20一体成型的第一支撑板5上,电气滑环7的滑环转子71固定于公头连接块9上,所述谐波电机8的电机转轴84穿过公头连接块9并与之固定,使得谐波电机8能独立控制公头连接块9和滑环转子71的转动,公头插接块10固定在所述公头连接块9上。末端连接件21与机械夹具外壳20连接,末端工具22固定在末端连接件21上,流体线路和信号线路贯穿所述插接公头2和末端连接件21进入末端工具22,自由转动的同时而不缠绕,所述流体线路用于通过气体或液体,所述信号线路用于传输电和/或信号指令。
16、进一步的,所述插接公头2部分包括机械夹具外壳20,所述机械夹具外壳20由金属、铝、钢、钛铝合金、高强度铝合金、aw7075、纤维增强塑料、玻璃纤维增强塑料(gfk)、碳纤维增强塑料(cfk)制成;所述机械夹具外壳20在机械夹具腔体内部一体成型有第一支撑板5,所述第一支撑板5与机械夹具外壳20的配合设置可以固定电气滑环7的滑环定子72以及谐波电机8;所述谐波电机8转轴84远离电机一侧为圆柱切边形,用于定位滑环动子71和滑环定子72,进入设于公头连接块9上的台阶限位孔96并与公头连接块9固定,使得公头连接块9能在谐波电机8的驱动下发生转动;所述公头连接块9与公头插接块10固定连接;所述公头连接块9与所述电气滑环7的滑环动子71固定连接,由此实现滑环动子71在谐波电机8带动下发生转动,而滑环定子72保持固定;所述滑环动子71上均匀分布有若干个流体进嘴75,滑环定子72上对称分布有若干流体出嘴76,流体由所述公头插接块10上的公头对插流道102经过流管孔93逐级密封接入到流体进嘴75,信号线路73由公头对插针101经过信号孔92接入滑环动子71,并由滑环定子72侧引出进入谐波电机8;所述滑环定子72远离滑环卡槽52的一侧由台阶形压块13包围紧固以确保电气滑环7整体不出现晃动;所述台阶形压块13与公头连接块9在相对应台阶部位设有第一轴承11,第一轴承11的动子侧与公头连接块9接触,第一轴承11的定子侧与台阶形压块13接触,为了防止第一轴承11的垂直移位,在第一轴承11和台阶形压块13的另一侧边之间加设第一卡簧12。
17、进一步的,所述机械夹具外壳20与台阶形压块13通过第三连接螺钉20a结合,与端部连接件21通过第四连接螺钉20b结合;所述第一支撑板5上开设有流体通道51和滑环卡槽52以及滑环固定牙座53,所述滑环卡槽52用于将电气滑环7卡设在滑环卡槽52内部以限制滑环定子72在竖直方向上的移动,所述滑环固定牙座53上开设有第二滑环固定孔74c,滑环固定螺钉74a穿过机械夹具外壳20上的第一滑环固定孔74b以及第二滑环固定孔74c紧固至滑环定子上的第三滑环固定孔74d,以限制滑环定子72在水平方向上的移动。
18、进一步的,所述第一支撑板5上开设有下沉螺纹过孔82b,紧固螺钉82a穿过下沉螺纹过孔82b进入电机定子上的紧固螺纹82c,上述设定可以将电机定子侧固定于所述第一支撑板的背侧,进而实现电机固定于外壳上;此外,紧固螺钉83a穿过设于电机法兰盘81上的转轴螺纹孔83b进入电机动子上的紧固螺纹83c,由此将电机转轴84接入电机动子侧,使得电机转轴84可以自由转动;所述电机转轴84的圆柱切边侧以转轴限位螺钉94a和转轴限位螺孔94b固定在公头连接块9上,电机转轴84的圆柱切边背侧以转轴紧固螺钉97a和转轴紧固螺孔97b固定在公头连接块9上,以实现电机转轴84与公头连接块9的固定,使得公头连接块9能在谐波电机8的驱动下发生转动。
19、进一步的,所述公头连接块9上设有与公头插接块10上的第一定位插孔91b配合连接的第一定位插销91a,公头连接块9和公头插接块10之间有流体管道;所述公头连接块9上还设有供信号线穿过的信号孔92、供流体线路穿过的流管孔93以及公头对接螺牙95。
20、更进一步的,所述末端工具22与末端连接件21之间通过第五连接螺钉225固定连接,所述末端工具22与末端连接件21之间过度连接有气液室221,气液室221中设有活塞(未示出),通过流体对活塞提供正压或负压完成末端工具22的夹紧或放开的动作,末端工具22为防滑结构,根据不同用途可使用具有不同形状夹具222的模块化机械夹具,例如可以是用于抓取的两爪式,或者用于旋扭的三爪式。
21、更进一步的,末端工具22设有通用接口,即在末端连接件21的内部侧具有预留流体接口223和预留信号接口224,二者分别选择性地与流体出嘴76和信号线路73连接。另外,模块化机械夹具通过插接公头2与上一级模块化机械臂的插接母头3可拆卸地插接,通过模块化机械夹具内部谐波电机的驱动,完成末端工具22自身的旋转动作,通过模块化机械臂内部谐波电机的驱动,完成末端工具22在空间中自由的定向运动,并且可根据实际使用场景拆卸或更换所述模块化机械夹具,并适应性地选择流体类型、接口类型。例如,对于载荷较小的物件,可使用气体气压驱动,对于载荷较大的物件,可使用液体液压驱动,对于精密动作,可增加使用信号驱动。又例如,模块化机械夹具在省去末端工具22的状态下可直接喷出气体或液体,完成送气或送液的操作,示例性的应用场景包括:喷涂、进样等。
22、本发明具备以下有益效果:
23、①利用本发明提出的模块化机械夹具结构简单,易于维护,可以实现在谐波电机的驱动下稳定、自由地转动,转动方式完全由谐波电机控制,不需要额外设置减速装置,同时将线路设置在模块化机械夹具内部,美观简洁的同时能确保机械夹具腔体中的信号线路和流体线路不受外部环境的刮碰,也不会出现交叉和缠绕的异常情况出现。
24、②本发明提出的模块化机械夹具预留了气/液路和信号路的通用接口,能适应多样化的工作环境。例如,对于载荷较小的物件,可使用气体气压驱动,对于载荷较大的物件,可使用液体液压驱动,对于精密动作,可使用电、气混合驱动;例如,两爪的夹爪用于抓取,而三爪的夹爪用于旋扭。又例如,模块化机械夹具可通过预留的气、液通道,加装气、液喷嘴直接喷出气体或液体,完成送气或送液的操作,示例性的应用场景包括:喷涂、加压等。
25、③本发明提出的模块化机械夹具的拆卸、组装和更换十分便捷,可根据不同的场景或需求将模块化机械夹具与模块化机械臂进行组装,另外,本发明模块化机械夹具的外壳由轻量化高强度材料制成,不存在集中受力区域,分散受力的设定能满足更大载荷下的运行。
- 还没有人留言评论。精彩留言会获得点赞!