一种钢结构焊接机器人控制方法及机器人与流程
本发明涉及机器人,更具体地说,涉及一种钢结构焊接控制方法及钢结构焊接机器人。
背景技术:
1、钢结构件生产需要采用焊接工艺技术,焊接生产工艺劳动强度高,环境差,安全性也不佳。
2、建筑、桥梁、船舶等产品大多是非标准产品,结构类型各异,焊缝种类繁多,装配误差大,焊缝位置不精确,加工生产难度较大。
3、目前钢结构焊接的方式主要有几种:一是人工焊接,生产现场布置混乱,造成加工效率低、自动化水平较低、人工工作量大、加工质量不稳定,安全性差等状况;二是采用传统工业机器人焊接,但因其需要专业技术人员编程,对操作工人技能水平要求较高,前期焊接编程准备时间较长,受钢结构形式多样,非标准件多等因素影响,传统工业机器人焊接在钢结构焊接基本无法满足生产。三是采用智能焊接机器人,通过3d模型导入,焊接程序自动生产,视觉修正实际焊接轨迹,由于此套系统,目前技术尚不成熟,可靠性无法保证,受技术和构件的特点制约,只能在局部简单构件上得到一定应用,绝大多数构件无法满足生产要求。
技术实现思路
1、本发明要解决的技术问题在于现有人工焊接,生产现场布置混乱,造成加工效率低、自动化水平较低、人工工作量大、加工质量不稳定,安全性差等状况,针对现有技术的上述的缺陷,一方面,本发明提供一种钢结构焊接机器人控制方法,用于钢结构构件焊接,包括步骤:
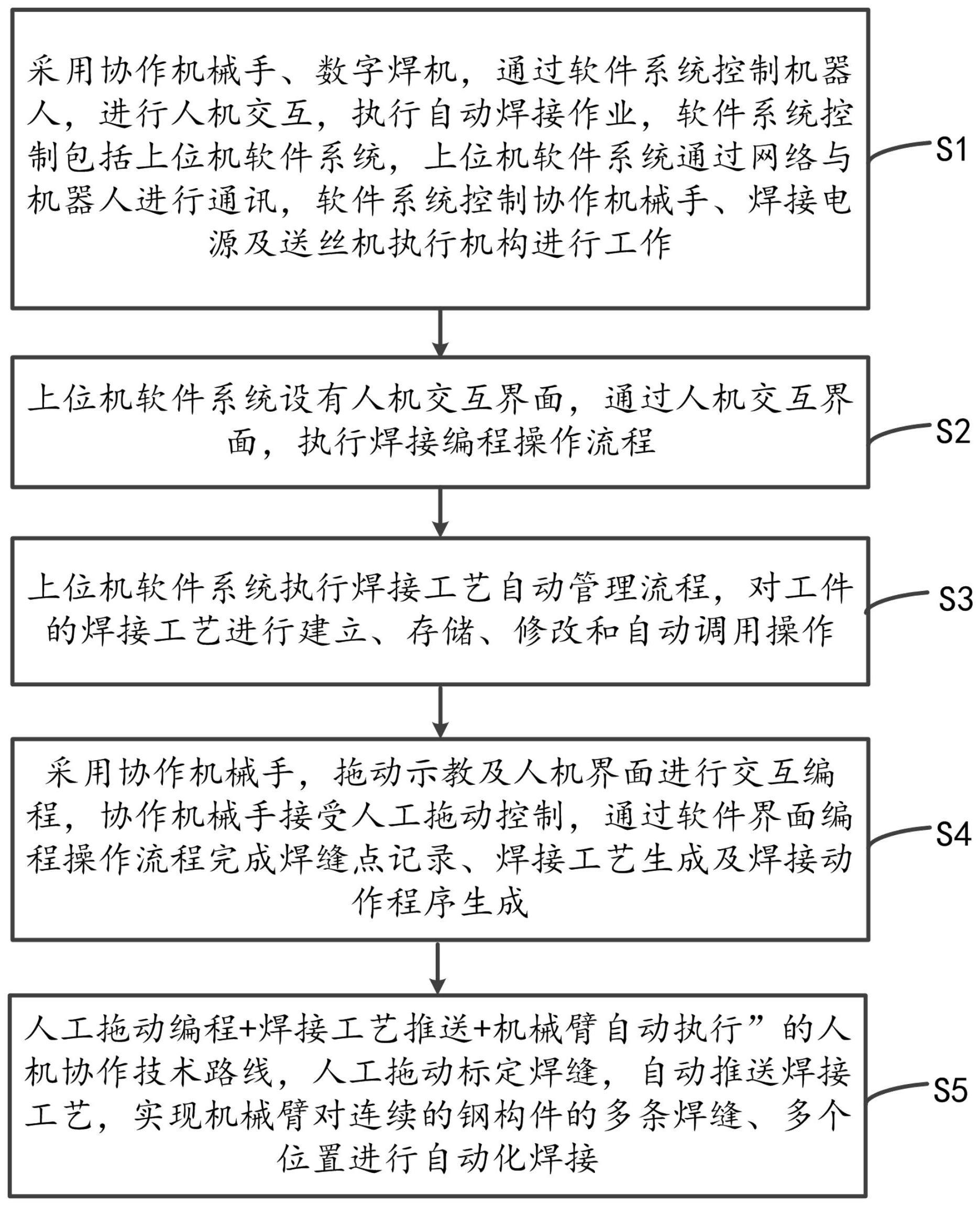
2、采用协作机械手、数字焊机,通过软件系统控制所述机器人,进行人机交互,执行自动焊接作业,所述软件系统控制包括上位机软件系统,所述上位机软件系统通过网络与所述机器人进行通讯,所述软件系统控制所述协作机械手、焊接电源及送丝机执行机构进行工作;
3、所述上位机软件系统设有人机交互界面,通过所述人机交互界面,执行焊接编程操作流程;
4、所述上位机软件系统执行焊接工艺自动管理流程,对工件的焊接工艺进行建立、存储、修改和自动调用操作;
5、采用所述协作机械手,拖动示教及人机界面进行交互编程,所述协作机械手接受人工拖动控制,通过软件界面编程操作流程完成焊缝点记录、焊接工艺生成及焊接动作程序生成;
6、从上位机获取机器人编程程序和焊接工艺推送信息,通过机械臂自动执行工作,实现机械臂对连续的钢构件的多条焊缝、多个位置进行自动化焊接。
7、优选地,所述上位机软件系统通过网络与所述机器人进行通讯的步骤之前还包括:
8、获取登录账号和登录密码;
9、对所述登录账号和所述登录密码进行验证,如果验证通过则运行以所述登录账号和所述登录密码通过所述上位机对所述机器人下达指令,如果验证失败,则发出验证失败的提示。
10、优选地,所述通过所述人机交互界面,执行焊接编程操作流程的步骤包括:
11、定义工件数量及板厚或者选择工件数据文件,所述工件数据文件包括工件数量及板厚信息;
12、按照所述工件数量及板厚信息,或者按照所述工件数据文件中的所述工件数量及板厚信息,控制机器人将焊枪对准所需焊接焊缝位置,并且记录焊缝点位信息;
13、判断焊缝信息是否全部记录完毕,是则控制机器人快速通过各点位,检测焊缝数据是否正确。
14、优选地,所述通过所述人机交互界面,执行焊接编程操作流程
15、控制机器人进行起弧焊接;
16、判断所述机器人是否起弧焊接完毕,如是,则控制所述机器人运行全部焊缝以检测焊接过程是正确。
17、另一方面,本发明还提供了一种钢结构焊接机器人,包括:
18、台架,上位机,气瓶,送丝机,送丝盘,六轴协作机械手,焊枪,所述台架上设有所述上位机、六轴协作机械手,所述台架侧边设有所述气瓶、所述送丝机及所述送丝盘,所述送丝机置于所述送丝盘的上方,所述六轴协作机械手顶部设有所述焊枪。
19、优选地,所述台架上还设有龙门平台,所述龙门平台上设有升降轴、所述焊机、桶装焊丝,所述送丝机设于所述龙门平台上,所述六轴协作机械手置于所述龙门平台下方。
20、优选地,所述龙门平台上还设有移动轨道。
21、优选地,所述移动轨道上设有移动平台。
22、优选地,所述移动平台上设有升降轴,所述送丝机置于所述升降轴上。
23、优选地,所述升降轴上设有悬臂梁。
24、实施本发明的钢结构焊接机器人控制方法及钢结构焊接机器人,具有以下有益效果:通过人机结合,焊缝识别,自动化焊接工艺输出,实现连续的多条焊缝、多位置自动化机器人机械手焊接,焊接稳定,安全且效率高。
技术特征:
1.一种钢结构焊接机器人控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的钢结构焊接机器人控制方法,其特征在于,所述上位机软件系统通过网络与所述机器人进行通讯的步骤之前还包括:
3.根据权利要求1所述的钢结构焊接机器人控制方法,其特征在于,所述通过所述人机交互界面,执行焊接编程操作流程包括:
4.根据权利要求3所述的钢结构焊接机器人控制方法,其特征在于,所述通过所述人机交互界面,执行焊接编程操作流程包括:
5.一种钢结构焊接机器人,其特征在于,包括:
6.根据权利要求5所述的钢结构焊接机器人,其特征在于,所述台架(1)上还设有龙门平台(8),所述龙门平台(8)上设有升降轴(9)、所述焊机(10)、桶装焊丝(11),所述送丝机(4)设于所述龙门平台(8)上,所述六轴协作机械手(6)置于所述龙门平台(8)下方。
7.根据权利要求5所述的钢结构焊接机器人,其特征在于,所述龙门平台(8)上还设有移动轨道(12)。
8.根据权利要求6所述的钢结构焊接机器人,其特征在于,所述移动轨道(12)上设有移动平台(13)。
9.根据权利要求8所述的钢结构焊接机器人,其特征在于,所述移动平台(13)上设有升降轴(9),所述送丝机(4)置于所述升降轴(9)上。
10.根据权利要求9所述的钢结构焊接机器人,其特征在于,所述升降轴(9)上设有悬臂梁(14)。
技术总结
本发明属于机器人技术领域,涉及钢结构焊接机器人控制方法及钢结构焊接机器人,方法包括:采用协作机械手、数字焊机,通过软件系统控制机器人,进行人机交互,执行自动焊接作业,软件系统控制包括上位机软件系统,本系统通过网络与机器人通讯,控制协作机械手、焊接电源及送丝机执行机构工作;上位机软件系统设有人机交互界面,执行焊接编程操作流程;上位机软件系统执行焊接工艺自动管理流程,对工件的焊接工艺进行建立、存储、修改和自动调用操作;采用协作机械手,拖动示教及人机界面进行交互编程,协作机械手接受人工拖动控制,通过软件界面编程操作流程完成焊缝点记录、焊接工艺生成及焊接动作程序生成。可实现多位置机械手焊接,焊接稳定,安全且效率高。
技术研发人员:邱甜,金崇翔,胡振华,杨政,饶志勇,何广城
受保护的技术使用者:杭州固建机器人科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!