机器人控制器及机器人系统的制作方法
本发明涉及机器人控制器及机器人系统。
背景技术:
1、例如,专利文献1所记载的机器人控制器具有箱体主体;收纳于箱体主体的电源基板、功率电路基板和再生电阻;以及配置于箱体主体的风扇。
2、专利文献1:日本特开2015-136780号公报
3、但是,在这样的机器人控制器中,电源基板、功率电路基板及再生电阻排列配置在箱体主体内的相同空间中。因而,这些处于相同的冷却条件,而难以在适合各部的条件下冷却各部。
技术实现思路
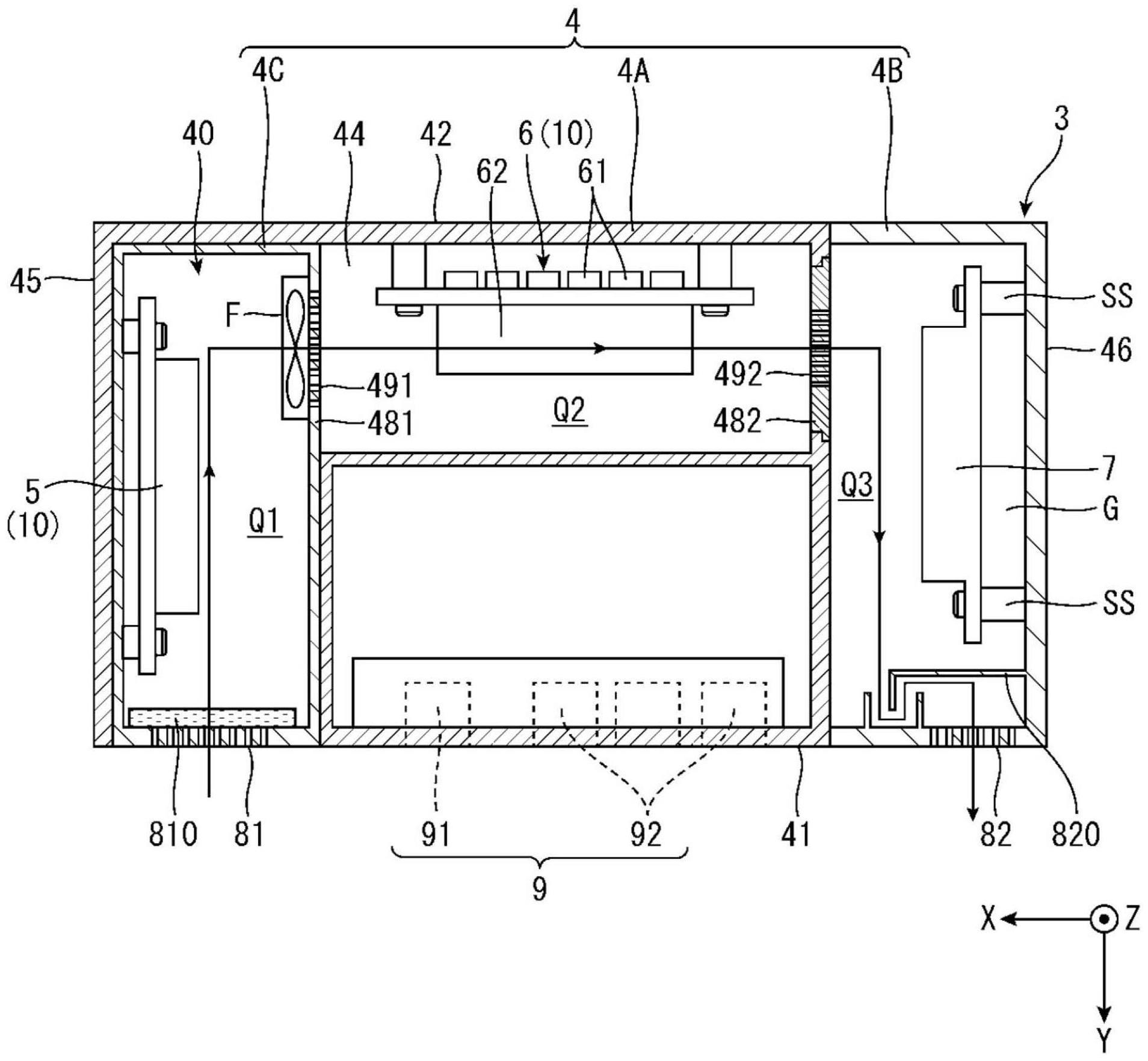
1、本发明的机器人控制器具有:箱体,具有吸气口、排气口以及连接所述吸气口和所述排气口并供从所述吸气口供给的气体朝向所述排气口流动的流路;
2、电路基板,配置在所述流路内,并将交流电流及直流电流中的一者转变为另一者;以及
3、再生电阻,配置在所述流路内且所述电路基板的下游侧,并消耗从机器人所具备的电机产生的反电动势。
4、本发明的机器人系统具有:机器人,具备电机;以及
5、机器人控制器,连接到所述机器人,并控制所述电机的驱动,
6、所述机器人控制器具有:箱体,具有吸气口、排气口以及连起所述吸气口和所述排气口并供从所述吸气口供给的气体朝向所述排气口流动的流路;
7、电路基板,配置在所述流路内,并将交流电流及直流电流中的一者转变为另一者;以及
8、再生电阻,配置在所述流路内且所述电路基板的下游侧,并消耗从所述电机产生的反电动势。
技术特征:
1.一种机器人控制器,其特征在于,
2.根据权利要求1所述的机器人控制器,其特征在于,
3.根据权利要求2所述的机器人控制器,其特征在于,
4.根据权利要求1所述的机器人控制器,其特征在于,
5.根据权利要求4所述的机器人控制器,其特征在于,
6.根据权利要求4所述的机器人控制器,其特征在于,
7.根据权利要求1至6中任一项所述的机器人控制器,其特征在于,
8.根据权利要求1至6中任一项所述的机器人控制器,其特征在于,
9.根据权利要求1至6中任一项所述的机器人控制器,其特征在于,
10.根据权利要求9所述的机器人控制器,其特征在于,
11.根据权利要求1至6中任一项所述的机器人控制器,其特征在于,
12.一种机器人系统,其特征在于,
技术总结
本发明提供一种机器人控制器及机器人系统,能够在适合各部的条件下冷却各部。机器人控制器具有:箱体,具有吸气口和排气口以及连接吸气口和排气口并供从吸气口供给的气体朝向排气口流动的流路;电路基板,配置在流路内,并将交流电流及直流电流中的一者转变为另一者;以及再生电阻,配置在流路内且电路基板的下游侧,并消耗从机器人所具备的电机产生的反电动势。另外,吸气口及排气口配置于相同的表面。
技术研发人员:山崎武马
受保护的技术使用者:精工爱普生株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!