一种带电作业机器人的制作方法
本发明涉及机器人,具体的说是一种带电作业机器人。
背景技术:
1、机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、现有的带电作业机器人,不能进行高度调节和水平位置的移动,具有很大的局限性,在作业时,不能稳定的夹持工具,操作不方便,不能完成一些高难度的工作的问题,不能很好的满足人们的使用需求。
3、因此需要一种带电作业机器人来解决上述的问题。
技术实现思路
1、本发明提供如下技术方案:一种带电作业机器人,包括机身主体,所述机身主体前侧的中部下端安装有电机,且电机前侧输出端的外壁安装有第一连接杆,所述第一连接杆远离电机的一端活动连接有第二连接杆,所述第二连接杆远离第一连接杆的一端活动安装在齿条板前侧底端中部,所述齿条板通过升降机构连接有第一夹持侧杆;
2、所述升降机构包括啮合在电机外壁的两组齿轮,所述齿轮中部的转杆活动连接在第二空腔内壁中部,所述第二空腔开设在机身主体内壁中部,所述齿轮顶端中部安装有第三连接杆,且第三连接杆顶端皆活动连接在第一夹持侧杆底端,所述第一夹持侧杆内侧底端外壁活动连接有第四连接杆,且第四连接杆底端皆活动连接在机身主体顶端,所述第一夹持侧杆顶端皆被第二夹持侧杆贯穿,所述第二夹持侧杆内侧皆固定安装在限位连接板外侧的上下两侧,所述限位连接板外壁的上下两端皆焊接有复位弹簧,且复位弹簧外侧顶端皆焊接在第一夹持侧杆内侧外壁上,所述复位弹簧中部皆环绕在第二夹持侧杆的外壁上,所述第二夹持侧杆外侧皆固定安装在拉动支杆内侧外壁的上下两侧,所述限位连接板内侧皆通过拆装机构连接有挤压侧板。
3、优选的,所述齿条板中部开设有第一空腔,且第一空腔内壁中部安装有固定限位块,所述固定限位块外壁中部皆固定安装有滑动块,所述滑动块外侧皆滑动连接在滑轨内侧,所述滑轨皆对称开设在第一空腔内壁中部。
4、优选的,所述拆装机构包括固定安装在限位连接板内侧外壁的插板,所述插板内侧顶端皆插设在限位开槽内侧,所述限位开槽开设在套接板外壁中部,所述插板与套接板之间通过螺栓进行连接锁定,所述套接板内侧顶端皆固定安装在挤压侧板外壁中部。
5、优选的,所述插板内侧外壁的上下两端皆滚动嵌入安装有两组滚珠,且滚珠外侧的外壁皆滚动抵接在限位开槽内壁上。
6、优选的,所述限位开槽内壁皆等距离安装有五组固定插块,且固定插块外侧顶端皆插设在插板外壁上,所述固定插块外侧外壁的圆弧状材质设置成橡胶。
7、优选的,所述机身主体底端外壁皆固定安装有l型连接杆,且l型连接杆底端外壁皆通过转杆连接有两组轱辘,所述轱辘底端高度低于机身主体底端高度。
8、与现有技术相比,本发明的有益效果是:
9、该带电作业机器人设置有调节机构,能够对两组挤压侧板在夹持过程中的高度进行调节,可以稳定的夹持工具,操作便捷;
10、同时设置有拆装机构,可以相对较为便捷的对不同类型形状的挤压侧板进行更换,使得装置能够对不同形状的工具进行稳定夹持,提高了装置在使用过程中的功能性,保障了装置在使用过程中的实用性;
11、综上所述,本发明能够稳定调节第一夹持侧杆的升降高度及对工具的夹持稳定性,便捷操作,保障了装置在使用过程中的功能性和实用性。
12、附图说明
13、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
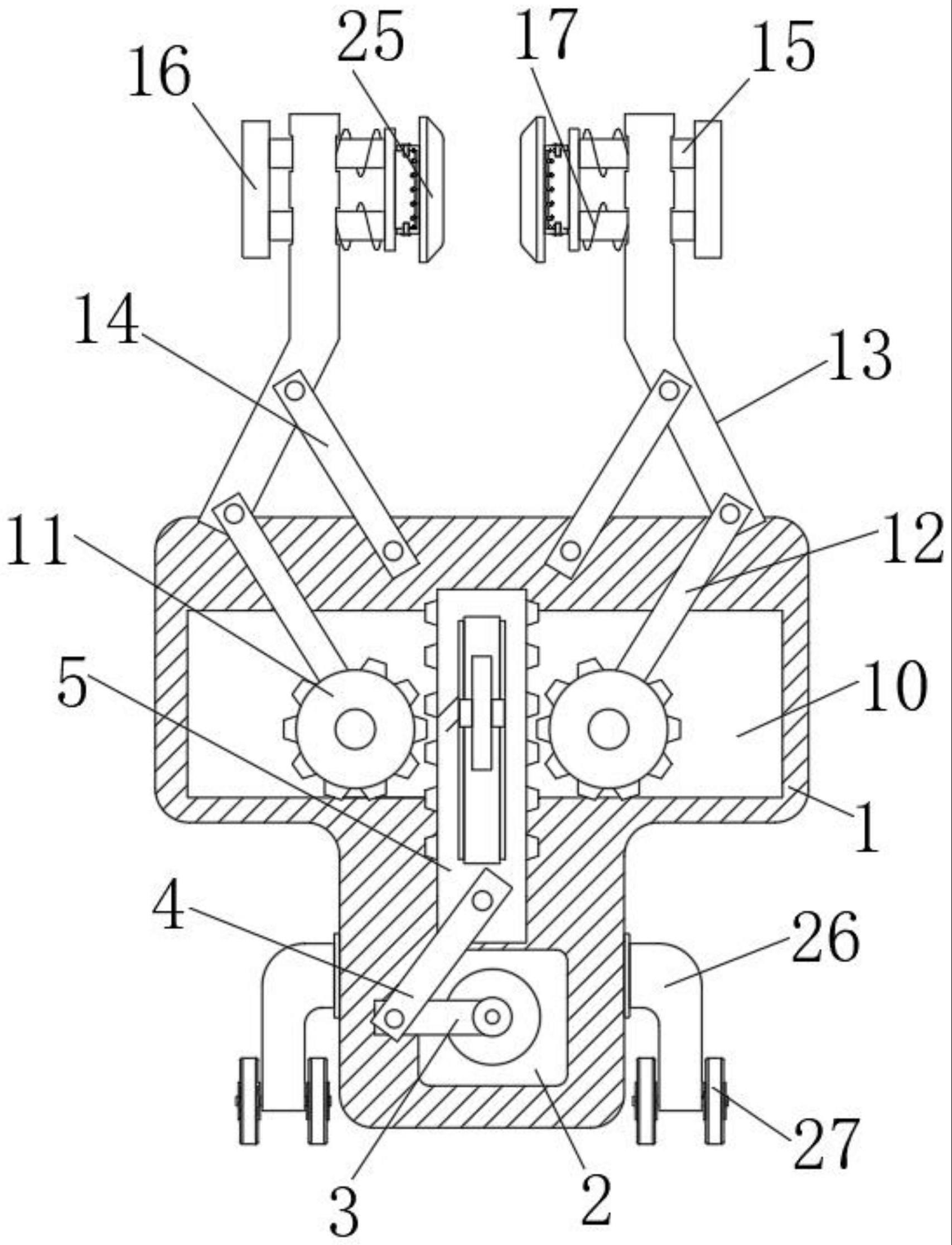
14、图1为本发明的正视剖面结构示意图;
15、图2为本发明的图1中第一夹持侧杆和第二夹持侧杆的局部放大结构示意图;
16、图3为本发明的图1中第二连接杆和齿条板的局部放大结构示意图;
17、图4为本发明的图2中a处放大结构示意图。
技术特征:
1.一种带电作业机器人,包括机身主体(1),其特征在于:所述机身主体(1)前侧的中部下端安装有电机(2),且电机(2)前侧输出端的外壁安装有第一连接杆(3),所述第一连接杆(3)远离电机(2)的一端活动连接有第二连接杆(4),所述第二连接杆(4)远离第一连接杆(3)的一端活动安装在齿条板(5)前侧底端中部,所述齿条板(5)通过升降机构连接有第一夹持侧杆(13);
2.根据权利要求1所述的一种带电作业机器人,其特征在于:所述齿条板(5)中部开设有第一空腔(6),且第一空腔(6)内壁中部安装有固定限位块(7),所述固定限位块(7)外壁中部皆固定安装有滑动块(8),所述滑动块(8)外侧皆滑动连接在滑轨(9)内侧,所述滑轨(9)皆对称开设在第一空腔(6)内壁中部。
3.根据权利要求1所述的一种带电作业机器人,其特征在于:所述拆装机构包括固定安装在限位连接板(18)内侧外壁的插板(19),所述插板(19)内侧顶端皆插设在限位开槽(20)内侧,所述限位开槽(20)开设在套接板(21)外壁中部,所述插板(19)与套接板(21)之间通过螺栓(24)进行连接锁定,所述套接板(21)内侧顶端皆固定安装在挤压侧板(25)外壁中部。
4.根据权利要求3所述的一种带电作业机器人,其特征在于:所述插板(19)内侧外壁的上下两端皆滚动嵌入安装有两组滚珠(22),且滚珠(22)外侧的外壁皆滚动抵接在限位开槽(20)内壁上。
5.根据权利要求3所述的一种带电作业机器人,其特征在于:所述限位开槽(20)内壁皆等距离安装有五组固定插块(23),且固定插块(23)外侧顶端皆插设在插板(19)外壁上,所述固定插块(23)外侧外壁的圆弧状材质设置成橡胶。
6.根据权利要求1所述的一种带电作业机器人,其特征在于:所述机身主体(1)底端外壁皆固定安装有l型连接杆(26),且l型连接杆(26)底端外壁皆通过转杆连接有两组轱辘(27),所述轱辘(27)底端高度低于机身主体(1)底端高度。
技术总结
本发明涉及机器人技术领域,具体的说是一种带电作业机器人,包括机身主体,所述机身主体前侧的中部下端安装有电机,且电机前侧输出端的外壁安装有第一连接杆,所述第一连接杆远离电机的一端活动连接有第二连接杆,所述第二连接杆远离第一连接杆的一端活动安装在齿条板前侧底端中部,所述齿条板通过升降机构连接有第一夹持侧杆。本发明设置有调节机构,能够对两组挤压侧板在夹持过程中的高度进行调节,可以稳定的夹持工具,操作便捷;同时设置有拆装机构,可以相对较为便捷的对不同类型形状的挤压侧板进行更换,使得装置能够对不同形状的工具进行稳定夹持,提高了装置在使用过程中的功能性,保障了装置在使用过程中的实用性。
技术研发人员:傅冬生
受保护的技术使用者:宣城南天电力工程有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!