一种航空发动机孔探维修打磨的刚柔耦合机器人
本发明涉及机器人,具体为一种航空发动机孔探维修打磨的刚柔耦合机器人。
背景技术:
1、柔性机器人通常是由多个小型连杆单元连接组成。柔性机器人能够很好地解决传统刚性机械臂的运动不灵活、自由度少等问题,而且柔性机器人具有体积小的优点,因此特别适合在复杂空间内进行加工作业,例如医疗微创手术、灾后救援和飞机发动机在翼的检修等。
2、在针对航空发动机在翼检修上,柔性机器人可进行孔探维修,无需拆卸航空发动机,降低维修时间,增加经济效益,具有一定应用空间。但目前柔性机器人存在的定位精度低,负载能力差等问题限制了柔性机器人在航空发动机在翼维修的应用前景。因此,本领域技术人员提供了一种航空发动机孔探维修打磨的刚柔耦合机器人,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种航空发动机孔探维修打磨的刚柔耦合机器人,以解决上述背景技术中提出的问题。
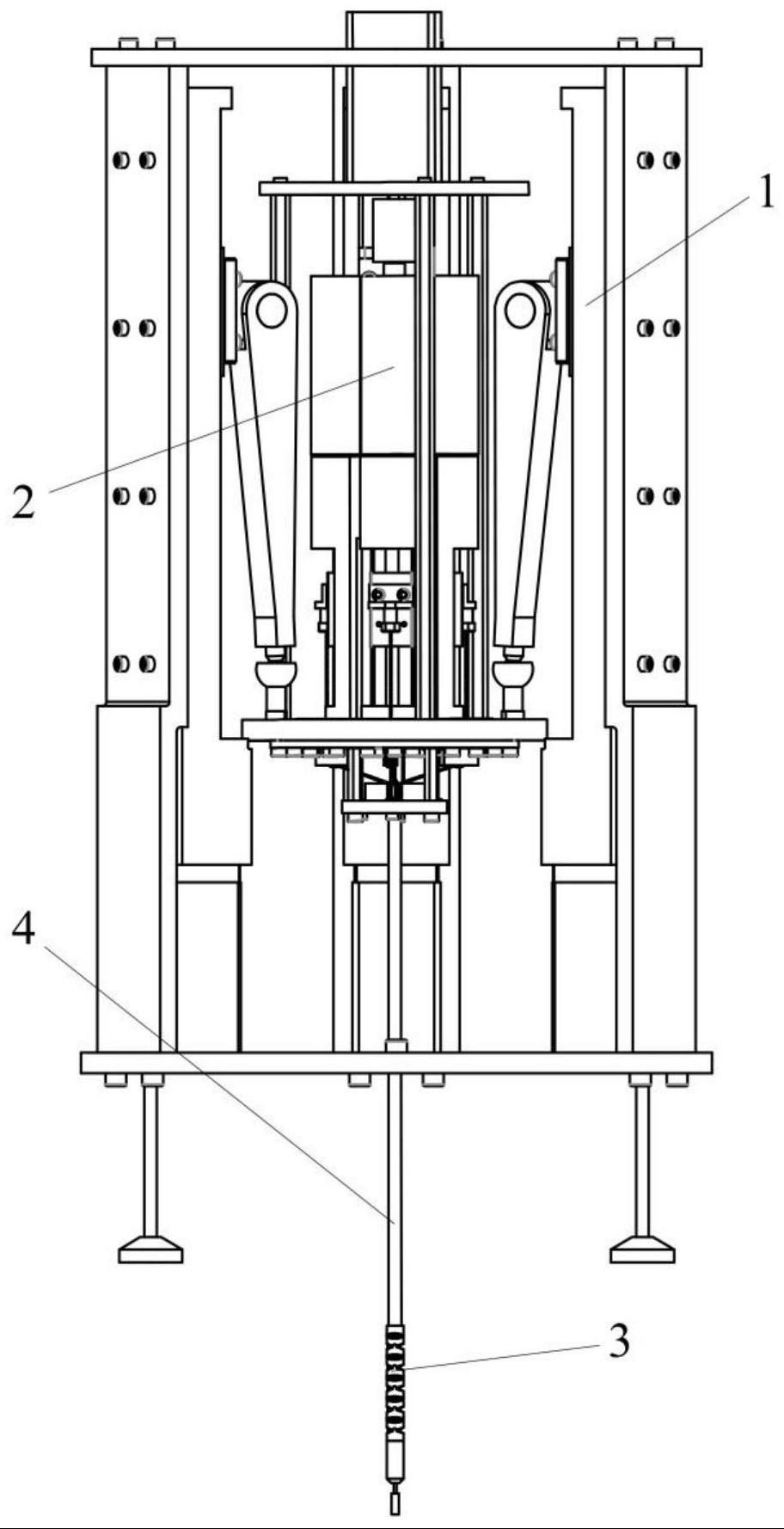
2、为实现上述目的,本发明提供如下技术方案:一种航空发动机孔探维修打磨的刚柔耦合机器人,包括位姿定位机构,所述位姿定位机构的内侧设置有驱动机构,所述位姿定位机构的底部设置有柔性臂段机构和连杆。
3、优选的,所述位姿定位机构包括上底板支撑、下底板支撑、三个连接板、三个第一导轨、三个丝杆、三个第一滑块、三个第一滑块座、三个机械手臂、三个球铰底座、动平台、三个第一驱动电机和三个支撑脚架,所述上底板支撑和下底板支撑之间通过三个连接板连接,三个所述第一导轨安装在连接板的内侧,三个所述丝杆均转动安装在对应的第一导轨上,三个所述第一滑块螺纹安装在对应的丝杆上,且所述第一滑块与第一导轨滑动配合,三个所述第一滑块座分别安装在对应的第一滑块的一侧,三个所述机械手臂分别安装在对应的第一滑块座的一侧,三个所述球铰底座分别安装在对应的机械手臂的底端,所述动平台安装在三个球铰底座的底端,三个所述第一驱动电机安装在第一导轨的底端,且所述第一驱动电机的输出轴与丝杆的底端连接,三个所述支撑脚架均安装在下底板支撑的底端,所述第一导轨、丝杆和第一滑块构成一个移动组件。
4、优选的,所述柔性臂段机构包括一个首端连杆、多个关节连杆、一个末端连杆、三个驱动绳索、多个小段弹性支撑杆、一个第三驱动电机和一个打磨机,所述首端连杆一端面上布置有第一连接槽,所述首端连杆在第一连接槽底部有沿轴向非贯通的两个对称的第一支撑孔,所述首端连杆在第一连接槽外的实体部位沿轴向在同一圆周上贯通形成有多个对称分布的第一导向孔,所述末端连杆一端面上布置有第二连接槽,所述末端连杆在第二连接槽内侧平面上有沿轴向非贯通的两个对称的第二支撑孔,所述末端连杆在第二连接槽外的实体部分沿轴向贯通在同一圆周上形成有多个对称分布的第二导向孔,所述关节连杆一端面上布置有第一连接槽、第一导向孔和第一支撑孔,所述关节连杆另一端面上布置有第二连接槽、第二导向孔和第二支撑孔,三个所述驱动绳索通过第一导向孔、第二导向孔将各个关节连杆与首端连杆、末端连杆连接到一起,所述首端连杆与关节连杆、关节连杆与关节连杆、关节连杆与末端连杆之间分别通过第一连接槽和第二连接槽配合连接,并用两个小段弹性支撑杆连接第一支撑孔、第二支撑孔,所述第三驱动电机一端固定于末端连杆且另一端连接打磨机。
5、优选的,所述驱动机构包括第一连接盘、转动电机、三个第一支撑杆、定子平台、转子平台、六个定滑轮、三个第二支撑杆、第二连接盘、一个连杆孔、中心主轴、三个第二驱动电机、三个第二导轨、三个第二滑块座和三个第二滑块,所述转动电机安装在第一连接盘上,三个所述第一支撑杆均安装在第一连接盘的底端,所述定子平台安装在三个第一支撑杆的底端,所述转子平台安装在定子平台上,六个所述定滑轮分别安装在对应的转子平台和第二连接盘上,三个所述第二支撑杆均安装在转子平台的底部,所述第二连接盘安装在三个第二支撑杆的底端,所述第二连接盘上开设有一个连杆孔,所述中心主轴安装在转动电机的输出轴上,且所述中心主轴的底端与转子平台的上端连接,三个所述第二导轨均安装在中心主轴上,三个所述第二滑块分别滑动安装在对应的第二导轨上,三个所述第二滑块座分别安装在对应的第二滑块上,所述第二滑块均通过第二滑块座与驱动绳索的一端相连,所述第二驱动电机带动第二滑块传动部结构采用相同结构的移动组件。
6、优选的,所述首端连杆整体呈空心圆柱状且左右两端其中一端是平面端,所述首端连杆的另一端为两对称斜面相交的斜面端且斜面端相交处向内凹陷形成第一连接槽,所述末端连杆整体也呈空心圆柱状且左右两端其中一端是平面端,所述末端连杆的另一端为两对称斜面相交的斜面端且斜面端相交处向外凸出形成第二连接槽。
7、优选的,所述关节连杆整体呈空心圆柱状且左右两端都为对称斜面相交形成的端面,所述关节连杆的左右两端面斜面相交处相互垂直且一端凹陷形成第一连接槽,所述关节连杆的另一端凸出形成第二连接槽。
8、优选的,所述动平台可分为转子平台和定子平台。
9、优选的,所述连杆为空心杆件,所述连杆的一端与连杆孔固接且另一端连接首端连杆。
10、与现有技术相比,本发明的有益效果是:
11、1、本发明采用位姿定位机构控制柔性机构位置的方式,提高了机器人整体的可控性与定位精度;
12、2、本发明同时还采用柔性机构去连接打磨机,使得打磨机与发动机叶片柔性接触,可实现打磨机的调节,在一定程度上减少了打磨机对于发动机叶片造成的损伤;
13、3、本发明同时还采用双弹性支撑杆垂直交错连接关节连杆的方式,增加了自由度,同时具有较高的扭转刚度,提高了位置精度,降低了控制误差;
14、4、本发明同时还臂段机构上连杆单元均采用空心结构,重量轻,稳定性好。
技术特征:
1.一种航空发动机孔探维修打磨的刚柔耦合机器人,包括位姿定位机构(1),其特征在于:所述位姿定位机构(1)的内侧设置有驱动机构(2),所述位姿定位机构(1)的底部设置有柔性臂段机构(3)和连杆(4)。
2.根据权利要求1所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述位姿定位机构(1)包括上底板支撑(101)、下底板支撑(111)、三个连接板(110)、三个第一导轨(108)、三个丝杆(104)、三个第一滑块(102)、三个第一滑块座(103)、三个机械手臂(105)、三个球铰底座(106)、动平台(107)、三个第一驱动电机(109)和三个支撑脚架(112),所述上底板支撑(101)和下底板支撑(111)之间通过三个连接板(110)连接,三个所述第一导轨(108)安装在连接板(110)的内侧,三个所述丝杆(104)均转动安装在对应的第一导轨(108)上,三个所述第一滑块(102)螺纹安装在对应的丝杆(104)上,且所述第一滑块(102)与第一导轨(108)滑动配合,三个所述第一滑块座(103)分别安装在对应的第一滑块(102)的一侧,三个所述机械手臂(105)分别安装在对应的第一滑块座(103)的一侧,三个所述球铰底座(106)分别安装在对应的机械手臂(105)的底端,所述动平台(107)安装在三个球铰底座(106)的底端,三个所述第一驱动电机(109)安装在第一导轨(108)的底端,且所述第一驱动电机(109)的输出轴与丝杆(104)的底端连接,三个所述支撑脚架(112)均安装在下底板支撑(111)的底端,所述第一导轨(108)、丝杆(104)和第一滑块(102)构成一个移动组件。
3.根据权利要求1所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述柔性臂段机构(3)包括一个首端连杆(31)、多个关节连杆(33)、一个末端连杆(32)、三个驱动绳索(36)、多个小段弹性支撑杆(37)、一个第三驱动电机(34)和一个打磨机(35),所述首端连杆(31)一端面上布置有第一连接槽(313),所述首端连杆(31)在第一连接槽(313)底部有沿轴向非贯通的两个对称的第一支撑孔(311),所述首端连杆(31)在第一连接槽(313)外的实体部位沿轴向在同一圆周上贯通形成有多个对称分布的第一导向孔(312),所述末端连杆(32)一端面上布置有第二连接槽(323),所述末端连杆(32)在第二连接槽(323)内侧平面上有沿轴向非贯通的两个对称的第二支撑孔(321),所述末端连杆(32)在第二连接槽(323)外的实体部分沿轴向贯通在同一圆周上形成有多个对称分布的第二导向孔(322),所述关节连杆(33)一端面上布置有第一连接槽(313)、第一导向孔(312)和第一支撑孔(311),所述关节连杆(33)另一端面上布置有第二连接槽(323)、第二导向孔(322)和第二支撑孔(321),三个所述驱动绳索(36)通过第一导向孔(312)、第二导向孔(322)将各个关节连杆(33)与首端连杆(31)、末端连杆(32)连接到一起,所述首端连杆(31)与关节连杆(33)、关节连杆(33)与关节连杆(33)、关节连杆(33)与末端连杆(32)之间分别通过第一连接槽(313)和第二连接槽(323)配合连接,并用两个小段弹性支撑杆(37)连接第一支撑孔(311)、第二支撑孔(321),所述第三驱动电机(34)一端固定于末端连杆(32)且另一端连接打磨机(35)。
4.根据权利要求1所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述驱动机构(2)包括第一连接盘(202)、转动电机(201)、三个第一支撑杆(205)、定子平台(210)、转子平台(211)、六个定滑轮(209)、三个第二支撑杆(213)、第二连接盘(212)、一个连杆孔(214)、中心主轴(203)、三个第二驱动电机(204)、三个第二导轨(206)、三个第二滑块座(207)和三个第二滑块(208),所述转动电机(201)安装在第一连接盘(202)上,三个所述第一支撑杆(205)均安装在第一连接盘(202)的底端,所述定子平台(210)安装在三个第一支撑杆(205)的底端,所述转子平台(211)安装在定子平台(210)上,六个所述定滑轮(209)分别安装在对应的转子平台(211)和第二连接盘(212)上,三个所述第二支撑杆(213)均安装在转子平台(211)的底部,所述第二连接盘(212)安装在三个第二支撑杆(213)的底端,所述第二连接盘(212)上开设有一个连杆孔(214),所述中心主轴(203)安装在转动电机(201)的输出轴上,且所述中心主轴(203)的底端与转子平台(211)的上端连接,三个所述第二导轨(206)均安装在中心主轴(203)上,三个所述第二滑块(208)分别滑动安装在对应的第二导轨(206)上,三个所述第二滑块座(207)分别安装在对应的第二滑块(208)上,所述第二滑块(208)均通过第二滑块座(207)与驱动绳索(36)的一端相连,所述第二驱动电机(204)带动第二滑块(208)传动部结构采用相同结构的移动组件。
5.根据权利要求3所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述首端连杆(31)整体呈空心圆柱状且左右两端其中一端是平面端,所述首端连杆(31)的另一端为两对称斜面相交的斜面端且斜面端相交处向内凹陷形成第一连接槽(313),所述末端连杆(32)整体也呈空心圆柱状且左右两端其中一端是平面端,所述末端连杆(32)的另一端为两对称斜面相交的斜面端且斜面端相交处向外凸出形成第二连接槽(323)。
6.根据权利要求3所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述关节连杆(33)整体呈空心圆柱状且左右两端都为对称斜面相交形成的端面,所述关节连杆(33)的左右两端面斜面相交处相互垂直且一端凹陷形成第一连接槽(313),所述关节连杆(33)的另一端凸出形成第二连接槽(323)。
7.根据权利要求4所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述动平台(107)可分为转子平台(211)和定子平台(210)。
8.根据权利要求4所述的一种航空发动机孔探维修打磨的刚柔耦合机器人,其特征在于:所述连杆(4)为空心杆件,所述连杆(4)的一端与连杆孔(214)固接且另一端连接首端连杆(31)。
技术总结
本发明公开了一种航空发动机孔探维修打磨的刚柔耦合机器人,包括位姿定位机构,所述位姿定位机构的内侧设置有驱动机构,所述位姿定位机构的底部设置有柔性臂段机构和连杆,所述位姿定位机构包括上底板支撑、下底板支撑、三个连接板、三个第一导轨、三个丝杆、三个第一滑块、三个第一滑块座、三个机械手臂、三个球铰底座、动平台、三个第一驱动电机和三个支撑脚架,所述上底板支撑和下底板支撑之间通过三个连接板连接。本发明在使用时,一共有四个弯曲自由度、一个转动自由度和一个移动自由度,一共六个自由度,具有运动灵活,自由度多,可控性高,定位精度表现良好等优点,适合在狭小复杂的空间下进行加工作业。
技术研发人员:王旭浩,许贻龙,吴孟丽,曹轶然,张悦,王成发,孙硕,王双硕,贾林达
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!