一种机器人自适应神经滑模控制方法、设备及介质与流程
本技术涉及机器人,尤其涉及一种机器人自适应神经滑模控制方法、设备及介质。
背景技术:
1、目前,机器人在空间探索、手术机器人以及工业应用等领域有着广泛的应用。为了满足控制性能的要求,各种先进的控制技术可以应用于机器人的控制器,如鲁棒控制、滑模控制、模糊控制、神经网络控制等。
2、然而,间隙滞后现象广泛存在于伺服机构、维纳系统、飞行器等物理系统和设备中。机械手驱动关节反向运动时会产生间隙滞后,机械手的间隙滞后和系统不确定性(如扰动、非线性摩擦、耦合项等)影响了机械手跟踪控制的精度,而这些不确定性是不容易预先获得的,以致难以对机械臂的跟踪精度较差。
技术实现思路
1、本技术实施例提供了一种机器人自适应神经滑模控制方法、设备及介质,用于解决如下技术问题:机械手的间隙滞后和系统不确定性,影响了机械手跟踪控制的精度,而这些不确定性是不容易预先获得的,以致难以对机械臂的跟踪精度较差。
2、本技术实施例采用下述技术方案:
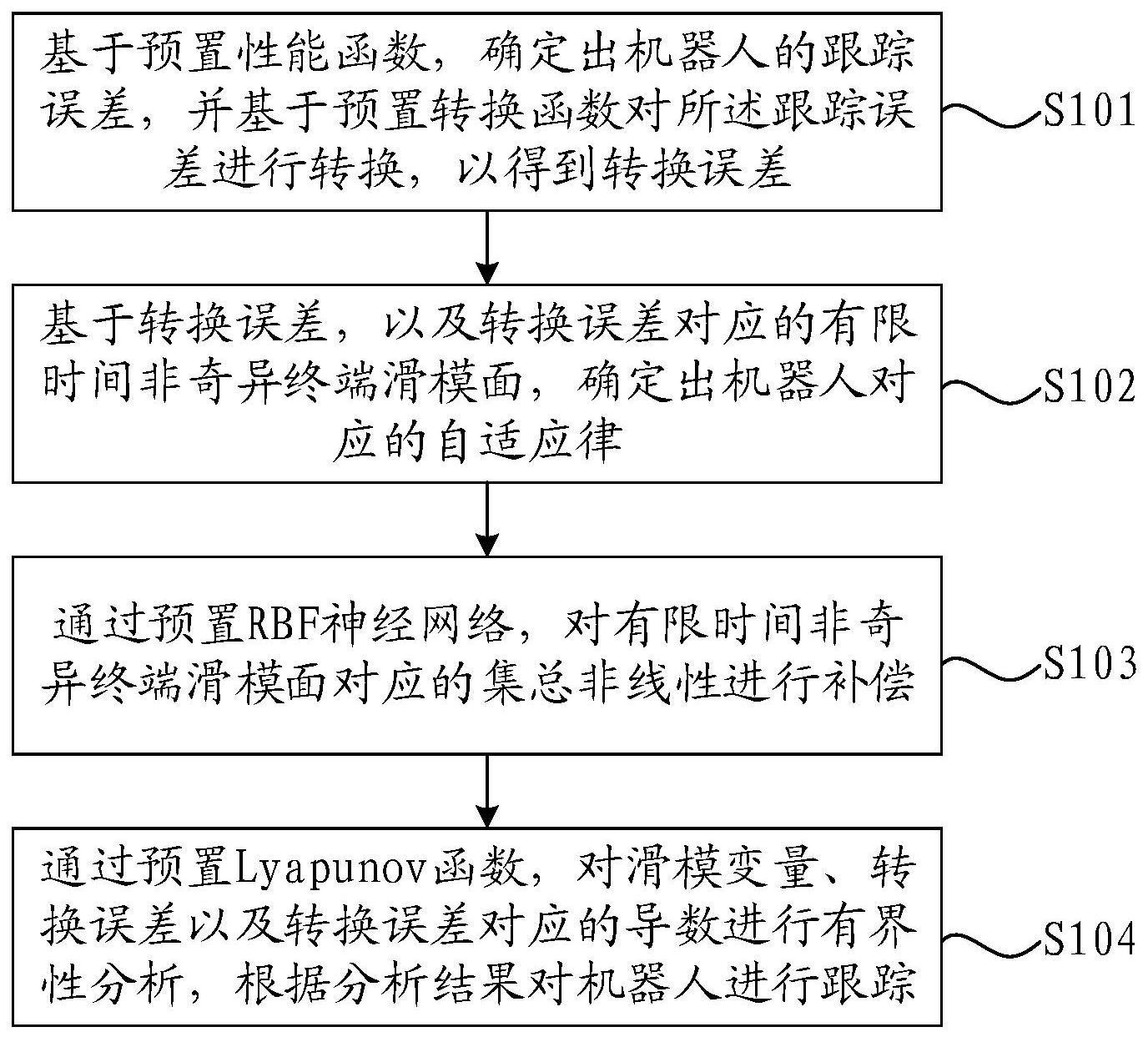
3、本技术实施例提供一种机器人自适应神经滑模控制方法。包括,基于预置性能函数,确定出机器人的跟踪误差,并基于预置转换函数对跟踪误差进行转换,以得到转换误差;基于转换误差,以及转换误差对应的有限时间非奇异终端滑模面,确定出机器人对应的自适应律;通过预置rbf神经网络,对有限时间非奇异终端滑模面对应的集总非线性进行补偿;通过预置lyapunov函数,对滑模变量、转换误差以及转换误差对应的导数进行有界性分析,以根据分析结果对机器人进行跟踪。
4、本技术实施例为了保证闭环系统的暂态和稳态性能,结合预设性能函数进行自调整增益系数的非奇异终端滑模控制。其次,基于滑模变量,提出了一种新的自适应律,在不需要先验知识的情况下,能够有效地估计系统不确定性的上界。此外,为了逼近系统非线性函数和未知动力学,引入径向基函数神经网络对集总非线性进行补偿。通过lyapunov函数确定出所有信号都是一致最终有界的。从而能够有效地削弱间隙迟滞的影响,实现机器人的高精度跟踪性能。
5、在本技术的一种实现方式中,基于预置性能函数,确定出机器人的跟踪误差,并基于预置转换函数对跟踪误差进行转换,以得到转换误差,具体包括:根据机器人对应的关节位置向量,确定出机器人对应的期望的跟踪轨迹;基于预置性能函数与期望的跟踪轨迹确定出机器人的跟踪误差,将踪误差将转换为非受限误差形式,并基预置转换函数对非受限误差形式进行转换,得到转换误差。
6、在本技术的一种实现方式中,基于预置性能函数与期望的跟踪轨迹确定出机器人的跟踪误差,将踪误差将转换为非受限误差形式,并基预置转换函数对非受限误差形式进行转换,得到转换误差,具体包括:将跟踪误差定义为
7、qe=q-qd
8、基于预置性能函数
9、fμi=(μ0i-μ∞i)exp(-a(k)t)+μ∞i
10、确定出机器人的跟踪误差;基于转换函数
11、qei=fμi(t)s(σi)
12、
13、对非受限误差形式进行转换,得到转换误差
14、
15、其中,q∈rn×1为机器人关节位置向量,qd表示期望的跟踪轨迹,μ0i>μ∞i>0,跟踪误差满足不等式-εifμi(t)<qei<εifμi(t),qei(i=1,2,…,n)表示第i个误差元素,0<εi≤1和参数a(k)将通过设置的间隔时间tf进行调整;s(σi)为转换函数,σi是第i个转换误差,μn=[μn1,μn2,…,μnm]t是中心向量。
16、在本技术的一种实现方式中,基于转换误差,以及转换误差对应的有限时间非奇异终端滑模面,确定出机器人对应的自适应律,具体包括:确定出转换误差对应的导数;基于转换误差的导数,确定出有限时间非奇异终端滑模面;确定出有限时间非奇异终端滑模面的导数;基于导数确定出机器人对应的控制律,以基于控制律确定出机器人对应的自适应律。
17、在本技术的一种实现方式中,基于导数确定出机器人对应的控制律,以基于控制律确定出机器人对应的自适应律,具体包括:基于导数
18、
19、确定出h为
20、
21、控制律为
22、τ=τ1+τ2
23、
24、
25、机器人对应的自适应律为
26、
27、
28、
29、其中,υ1,υ2,υ3为正常数,ξ为设定的死区大小;q∈rn×1为机器人关节位置向量、为机器人速度向量;m(q)∈rn×n是惯性矩阵,是向心的科里奥利矩阵,g(q)∈rn×1是引力矢量;d(t)为系统不确定性,是常数;跟踪误差qe=q-qd,其中qd表示期望的跟踪轨迹;θ1,θ2,θ3都是未知的正常量,||·||表示向量的欧几里德范数;qei(i=1,2,…,n)表示第i个误差元素;τ是间隙滞后的输入。
30、在本技术的一种实现方式中,通过预置rbf神经网络,对有限时间非奇异终端滑模面对应的集总非线性进行补偿之后,方法还包括:通过预置rbf神经网络
31、h=w*tx(n)+ω
32、对集总非线性进行确定;
33、基于函数
34、τ=τ1n+τ2
35、
36、
37、
38、对控制律与自适应律进行确定;其中,ω是rbf神经网络的近似误差;是w*的估计权重矩阵;yi和gi是两个正常数;q∈rn×1为机器人关节位置向量、为机器人速度向量;m(q)∈rn×n是惯性矩阵,是向心的科里奥利矩阵,g(q)∈rn×1是引力矢量。
39、在本技术的一种实现方式中,通过预置lyapunov函数,对滑模变量、转换误差以及转换误差对应的导数进行有界性分析,以根据分析结果对机器人进行跟踪,具体包括:确定出预置lyapunov函数的导数;基于进行集总非线性补偿后得到的控制律与自适应律,得到预置lyapunov函数的导数对应的young不等式;基于young不等式对滑模变量、转换误差以及转换误差对应的导数进行有界性分析。
40、在本技术的一种实现方式中,基于young不等式对滑模变量、转换误差以及转换误差对应的导数进行有界性分析,具体包括:
41、在||σ||≥κ的情况下
42、
43、确定出lyapunov函数
44、
45、对lyapunov函数进行导数求解,得到
46、
47、在的情况下,转换后的误差σ将在有限时间内收敛到有界集基于函数
48、
49、得到的有界集合为
50、
51、其中σi是第i个转换误差;δs为有界集合;为转换误差的导数;b为大于0的常数;0.5<p1<1。
52、本技术实施例提供一种机器人自适应神经滑模控制设备,包括:至少一个处理器;以及,与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够:基于预置性能函数,确定出机器人的跟踪误差,并基于预置转换函数对跟踪误差进行转换,以得到转换误差;基于转换误差,以及转换误差对应的有限时间非奇异终端滑模面,确定出机器人对应的自适应律;通过预置rbf神经网络,对有限时间非奇异终端滑模面对应的集总非线性进行补偿;通过预置lyapunov函数,对滑模变量、转换误差以及转换误差对应的导数进行有界性分析,以根据分析结果对机器人进行跟踪。
53、本技术实施例提供的一种非易失性计算机存储介质,存储有计算机可执行指令,计算机可执行指令设置为:基于预置性能函数,确定出机器人的跟踪误差,并基于预置转换函数对跟踪误差进行转换,以得到转换误差;基于转换误差,以及转换误差对应的有限时间非奇异终端滑模面,确定出机器人对应的自适应律;通过预置rbf神经网络,对有限时间非奇异终端滑模面对应的集总非线性进行补偿;通过预置lyapunov函数,对滑模变量、转换误差以及转换误差对应的导数进行有界性分析,以根据分析结果对机器人进行跟踪。
54、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:本技术实施例为了保证闭环系统的暂态和稳态性能,结合预设性能函数进行自调整增益系数的非奇异终端滑模控制。其次,基于滑模变量,提出了一种新的自适应律,在不需要先验知识的情况下,能够有效地估计系统不确定性的上界。此外,为了逼近系统非线性函数和未知动力学,引入径向基函数神经网络对集总非线性进行补偿。通过lyapunov函数确定出所有信号都是一致最终有界的。从而能够有效地削弱间隙迟滞的影响,实现机器人的高精度跟踪性能。
- 还没有人留言评论。精彩留言会获得点赞!