一种架线用自动行走划印机器人的制作方法
本发明涉及一种架线用自动行走划印机器人,属于电力。
背景技术:
1、在我国,输电线路架线施工附件安装作业方面,大都依靠人力辅助使用工器具进行附件安装作业。其中间隔棒由于其防振,分隔各子导线,防止线间鞭击的作用而广泛应用于输电线路架线施工过程中。跨越施工期间,间隔棒安装位置的确定往往需要人工进行测量标记,一方面作业依靠人员的主观经验判断,高空测量定位作业不精确,很难保证紧线和附件安装质量一次成优;另一方面需要施工人员在跨越塔间的线上进行行走测量,这样大大增加了施工人员疲劳程度,也给施工人员的人身安全带来隐患。
技术实现思路
1、本发明的目的在于提供一种架线用自动行走划印机器人,以解决现有技术间隔棒安装位置的确定往往需要人工进行测量标记,一方面作业依靠人员的主观经验判断,高空测量定位作业不精确的缺陷。
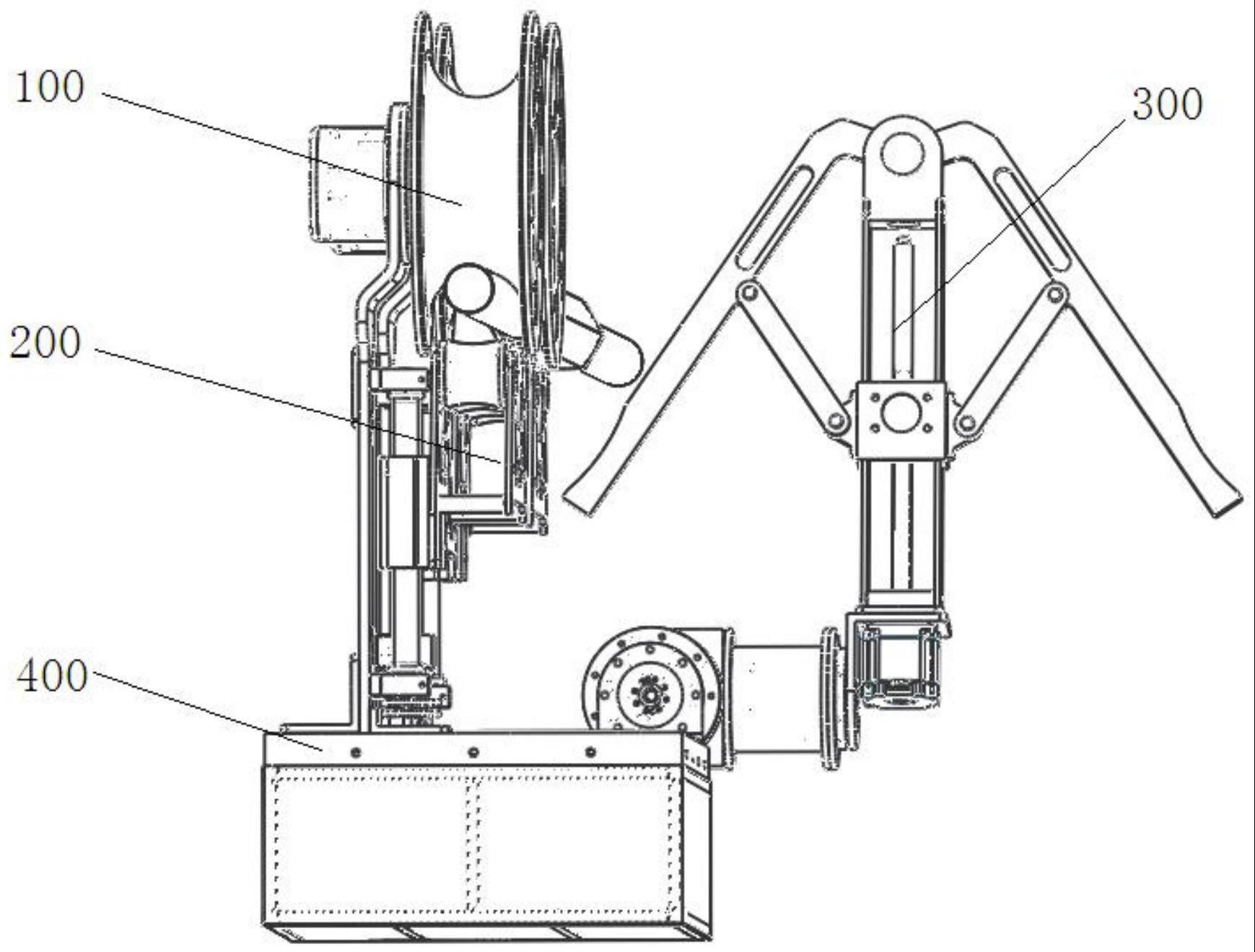
2、一种架线用自动行走划印机器人,包括:
3、行走机构,包括行走轮,所述行走轮连接有机器人关节电机,所述机器人关节电机尾部套设有行走轮连接板,所述行走轮连接板侧部设有镀铬杆,所述镀铬杆套设有直线轴承;
4、压紧机构,包括丝杠,所述丝杠上套设有压紧轮架滑块,所述压紧轮架滑块连接有压紧轮架固定板,所述压紧轮架固定板上设有压紧轮,所述丝杠底部设有减速电机,顶部设有丝杠固定座,所述丝杠固定座通过导轨连接板与行走轮连接板固接;
5、划印机构,包括铰链销固定座,所述铰链销固定座对称铰接有机械撑开铰链,所述铰链销固定座设有撑开丝杆,所述撑开丝杆底部设有丝杠电机,所述撑开丝杆上套设有丝杠滑块,所述丝杠滑块的两侧设有与机械撑开铰链铰接的机械拉紧铰链;
6、底座,所述机器人关节电机、行走轮连接板设于底座上,所述底座内设有用于控制行走机构、压紧机构和划印机构的控制模块及供电模块。
7、进一步地,所述机器人关节电机与行走轮连接板之间设有电机连接板。
8、进一步地,所述行走轮远离机器人关节电机的一端设有前挡板,所述机器人关节电机尾部设有后盖板。
9、进一步地,所述镀铬杆顶部和底部通过镀铬杆固定座与行走轮连接板连接。
10、进一步地,所述减速电机的动力端通过联轴器与丝杠连接,所述丝杠两端设有丝杠固定座,所述丝杠固定座的侧部设有丝杠安装板,所述丝杠安装板与导轨连接板连接。
11、进一步地,所述压紧轮通过压紧轮轴与压紧轮架固定板连接。
12、进一步地,所述机械拉紧铰链一端与机械撑开铰链的中部铰接,另一端与丝杠滑块固定座铰接。
13、进一步地,所述丝杠电机的侧部设有电机固定座,所述电机固定座连接有转向电机二,且转向电机的输出端与电机固定座连接,所述转向电机二的尾部连接有直角固定座,所述直角固定座的另一直角边连接有转向电机一,且转向电机一的输出端与直角固定座的另一直角边连接,所述转向电机一的尾部通过划印机构连接板与底座连接。
14、与现有技术相比,本发明所达到的有益效果:本发明实现了在多分裂导线上通过行走机构行走,划印机构根据机器人关节电机行走的距离,通过丝杠电机带动机械撑开铰链进行张开与导线接触进行划线,并同时在多分裂导线同一截面上进行划印操作,从而保证了划印工作的精确度,另外减轻了工作人员的工作疲劳强度,提高了工作效率。
技术特征:
1.一种架线用自动行走划印机器人,其特征在于,包括:
2.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述机器人关节电机(3)与行走轮连接板(6)之间设有电机连接板(4)。
3.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述行走轮(2)远离机器人关节电机(3)的一端设有前挡板(1),所述机器人关节电机(3)尾部设有后盖板(5)。
4.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述镀铬杆(8)顶部和底部通过镀铬杆固定座(10)与行走轮连接板(6)连接。
5.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述减速电机的动力端通过联轴器(17)与丝杠(15)连接,所述丝杠(15)两端设有丝杠固定座(13),所述丝杠固定座(13)的侧部设有丝杠安装板(12),所述丝杠安装板(12)与导轨连接板(11)连接。
6.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述压紧轮(20)通过压紧轮轴(21)与压紧轮架固定板(18)连接。
7.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述机械拉紧铰链(34)一端与机械撑开铰链(33)的中部铰接,另一端与丝杠滑块固定座(36)铰接。
8.根据权利要求1所述的架线用自动行走划印机器人,其特征在于,所述丝杠电机(38)的侧部设有电机固定座(41),所述电机固定座(41)连接有转向电机二(46),且转向电机的输出端与电机固定座(41)连接,所述转向电机二(46)的尾部连接有直角固定座,所述直角固定座的另一直角边连接有转向电机一(45),且转向电机一(45)的输出端与直角固定座的另一直角边连接,所述转向电机一(45)的尾部通过划印机构连接板(44)与底座(400)连接。
技术总结
本发明公开了一种架线用自动行走划印机器人,包括所述行走轮连接有机器人关节电机,所述机器人关节电机尾部套设有行走轮连接板,所述行走轮连接板侧部设有镀铬杆,所述镀铬杆套设有直线轴承;所述丝杠上套设有压紧轮架滑块,所述压紧轮架固定板上设有压紧轮,所述丝杠底部设有减速电机,所述丝杠固定座与行走轮连接板固接;所述铰链销固定座对称铰接有机械撑开铰链,所述铰链销固定座设有撑开丝杆,所述撑开丝杆底部设有丝杠电机,所述撑开丝杆上套设有丝杠滑块,所述丝杠滑块的两侧设有机械拉紧铰链;所述丝杠电机侧部设有划印模组电机转轴,所述划印模组电机转轴连接有划印模组电机,所述划印模组电机的输出端设有划印机构连接板。
技术研发人员:马龙,何伟杰,夏顺俊,戴如章,马昊,成健,陈礼,高灿,郭天成
受保护的技术使用者:江苏省送变电有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!