一种快速PPU机械手的制作方法
本发明属于机械手,具体涉及一种快速ppu机械手。
背景技术:
1、随着社会的不断发展和科技的不断进步,机械化、自动化生产已经逐渐成为发展趋势,由于对半导体电子加工设备中对取放结构取放产品精准度要求越来越高,且不但要求更高的速度,还要求更高的精度,由于需要不间断的连续对产品取放,在长时间使用后极易造成产品被取放的精准度出现偏差;
2、经检索,申请号为cn201821136970.4中公开的一种45°旋转ppu机械手,通过机械手装置实现对物料的夹取,成功夹取物料后,可根据实际的生产线需求,利用升降移动装置实现对物料的取放以及利用旋转装置实现对物料的旋转。通过步进马达传动下,由u臂带动滑轮体、滑轨等元件沿凸轮槽板轨迹摆动、和直线升降运动,应用于极其有限的空间内实现自动传输、进料和移载,其功能通过导向摆动和直线运动顺序来实现,在对升降导轨配合升降时,由于只有一个u臂配合滑轮体、滑轨对升降导轨实现升降的目的,在升降导轨底端夹取的产品重量较重时,易导致升降导轨因受重不均衡而倾斜,长时间的运行就会造成升降导轨对产品的夹取出现偏差,降低对产品取放精度;
3、因此,本发明提供了一种通过小齿轮配合大齿轮对升降机构传动的快速ppu机械手。
技术实现思路
1、本发明的目的在于提供一种快速ppu机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种快速ppu机械手,包括承载背板、设于承载背板背面的驱动电机以及对产品取放的升降滑行导轨;
4、所述承载背板上设有配合升降滑行导轨呈上弧形运动的制动组件;
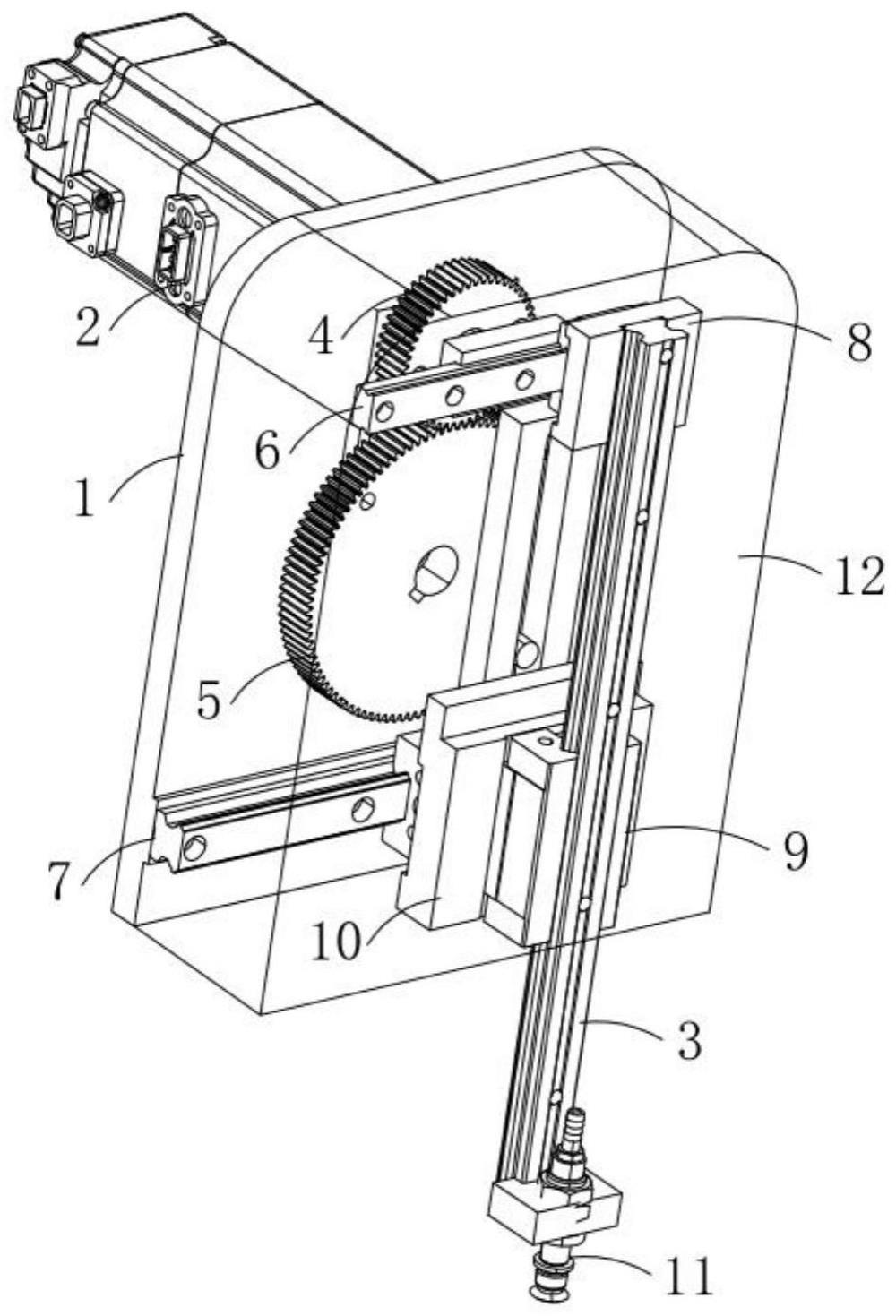
5、制动组件包括与驱动电机输出轴连接且转动设于承载背板外侧面的小齿轮、外缘的齿槽与小齿轮外缘齿牙啮合的大齿轮、设于小齿轮上的第一水平滑轨、以及设于承载背板上且位于大齿轮下部的第二水平滑轨;
6、所述升降滑行导轨的顶端通过呈水平的第一滑块与第一水平滑轨配合滑动连接,升降滑行导轨上呈垂向滑动设有第二滑块,且第二滑块的内侧面通过呈水平的第三滑块与第二水平滑轨滑动连接。
7、进一步的,所述升降滑行导轨的底端设有与取料吸盘或夹爪配合装配的连接底座。
8、进一步的,所述承载背板的外侧面设有对升降滑行导轨和制动组件覆盖的防护罩。
9、进一步的,所述升降滑行导轨的底端贯穿防护罩的底部。
10、进一步的,所述升降滑行导轨、第一水平滑轨和第二水平滑轨分别呈工字型设置。
11、进一步的,所述第一滑块与第一水平滑轨呈抱轨滑动连接。
12、进一步的,所述第二滑块与升降滑行导轨的外部呈抱轨滑动连接。
13、进一步的,所述第三滑块与第二水平滑轨呈抱轨滑动连接。
14、本发明具有以下技术效果和优点:
15、该快速ppu机械手,在承载背板上设置对通过小齿轮和大齿轮配合对升降滑行导轨呈上弧形移动完成取料以及放料的操作,实现小齿轮通过驱动电机运行产生转动时,小齿轮上的第一水平滑轨随着小齿轮的转动而产生转动,小齿轮在转动过程中通过第一滑块对升降滑行导轨,升降滑行导轨上移时升降滑行导轨配合第二滑块产生上升的作用力,并在第一水平滑轨通过小齿轮转动倾斜移动时,第二滑块内侧所设置的第三滑块在第二水平滑轨上移动,第一滑块在第一水平滑轨上移动,配合升降滑行导轨完成对产品的取料传送;
16、随着小齿轮转动至设定的角度后,升降滑行导轨通过小齿轮上的第一水平滑轨和第二水平滑轨呈上弧形实现垂向升降的运动,并在垂向移动时对产品完成取放的操作,保持升降滑行导轨配合设备长时间对产品取料放料运行稳定性的同时,快速完成取放料的操作,提高对产品配合设备加工的效率。
技术特征:
1.一种快速ppu机械手,包括承载背板(1)、设于承载背板(1)背面的驱动电机(2)以及对产品取放的升降滑行导轨(3),其特征在于:
2.根据权利要求1所述的一种快速ppu机械手,其特征在于:所述升降滑行导轨(3)的底端设有与取料吸盘或夹爪配合装配的连接底座(11)。
3.根据权利要求1所述的一种快速ppu机械手,其特征在于:所述承载背板(1)的外侧面设有对升降滑行导轨和制动组件覆盖的防护罩(12)。
4.根据权利要求3所述的一种快速ppu机械手,其特征在于:所述升降滑行导轨(3)的底端贯穿防护罩(12)的底部。
5.根据权利要求1所述的一种快速ppu机械手,其特征在于:所述升降滑行导轨(3)、第一水平滑轨(6)和第二水平滑轨(7)分别呈工字型设置。
6.根据权利要求5所述的一种快速ppu机械手,其特征在于:所述第一滑块(8)与第一水平滑轨(6)呈抱轨滑动连接。
7.根据权利要求5所述的一种快速ppu机械手,其特征在于:所述第二滑块(9)与升降滑行导轨(3)的外部呈抱轨滑动连接。
8.根据权利要求5所述的一种快速ppu机械手,其特征在于:所述第三滑块(10)与第二水平滑轨(7)呈抱轨滑动连接。
技术总结
本发明公开了一种快速PPU机械手,属于机械手技术领域,承载背板上设有配合升降滑行导轨呈上弧形运动的制动组件,承载背板上设置对通过小齿轮和大齿轮配合对升降滑行导轨呈上弧形移动完成取料以及放料的操作,随着小齿轮转动至设定的角度后,升降滑行导轨通过小齿轮上的第一水平滑轨和第二水平滑轨呈上弧形实现垂向升降的运动,并在垂向移动时对产品完成取放的操作,保持升降滑行导轨配合设备长时间对产品取料放料运行稳定性的同时,快速完成取放料的操作,提高对产品配合设备加工的效率。
技术研发人员:段利彪
受保护的技术使用者:段利彪
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!