一种智能制造车间生产线的工业机器人的制作方法
本发明涉及智能制造,具体来说涉及一种智能制造车间生产线的工业机器人。
背景技术:
1、三轴并联机器人,又称蜘蛛手机器人,能通过三个电机以较快速度驱使动平台移动,具备移动速度快,定位精准的特点,常配合视觉组件实现移动物体的抓取和安放。
2、动平台和定平台通过固定板和固定球进行球接,以使固定板能随着电机的旋转沿固定球转动。
3、根据专利号cn216883964u,公开(公告)日:2022-07-05,公开的平压压痕机并联机器人自动上料机构,它包括并联机器人、以及位于并联机器人末端的机械人手掌;所述的并联机器人包括工作台以及连接在工作台上的至少三个电机,每个电机的输出轴连接驱动臂,驱动臂的另一端铰接摆动杆;机械人手掌包括台面,台面上设置真空吸盘和安装孔,并联机器人的摆动杆末端连接在安装孔中,从而实现并联机器人与机械人手掌的连接;真空吸盘上端通过气管连接气泵,所述的并联机器人的电机和真空吸盘的气泵,均与plc控制器相连接。本实用新型规避了员工直接与平压压痕机接触的安全风险,同时并联机器人上料提高了整机的生产效率。
4、包括上述专利的现有技术中,在三轴并联机器人运行的过程中需要不断的快速移动动平台,以使固定板和固定球之间会不断的摩擦,并且因为动平台是有规律的,使固定板上的环形槽或球槽会出现一端磨损程度较大产生间隙,间隙会影响动平台的移动精度。
技术实现思路
1、本发明的目的是提供一种智能制造车间生产线的工业机器人,旨在解决间隙会影响动平台的移动精度的问题。
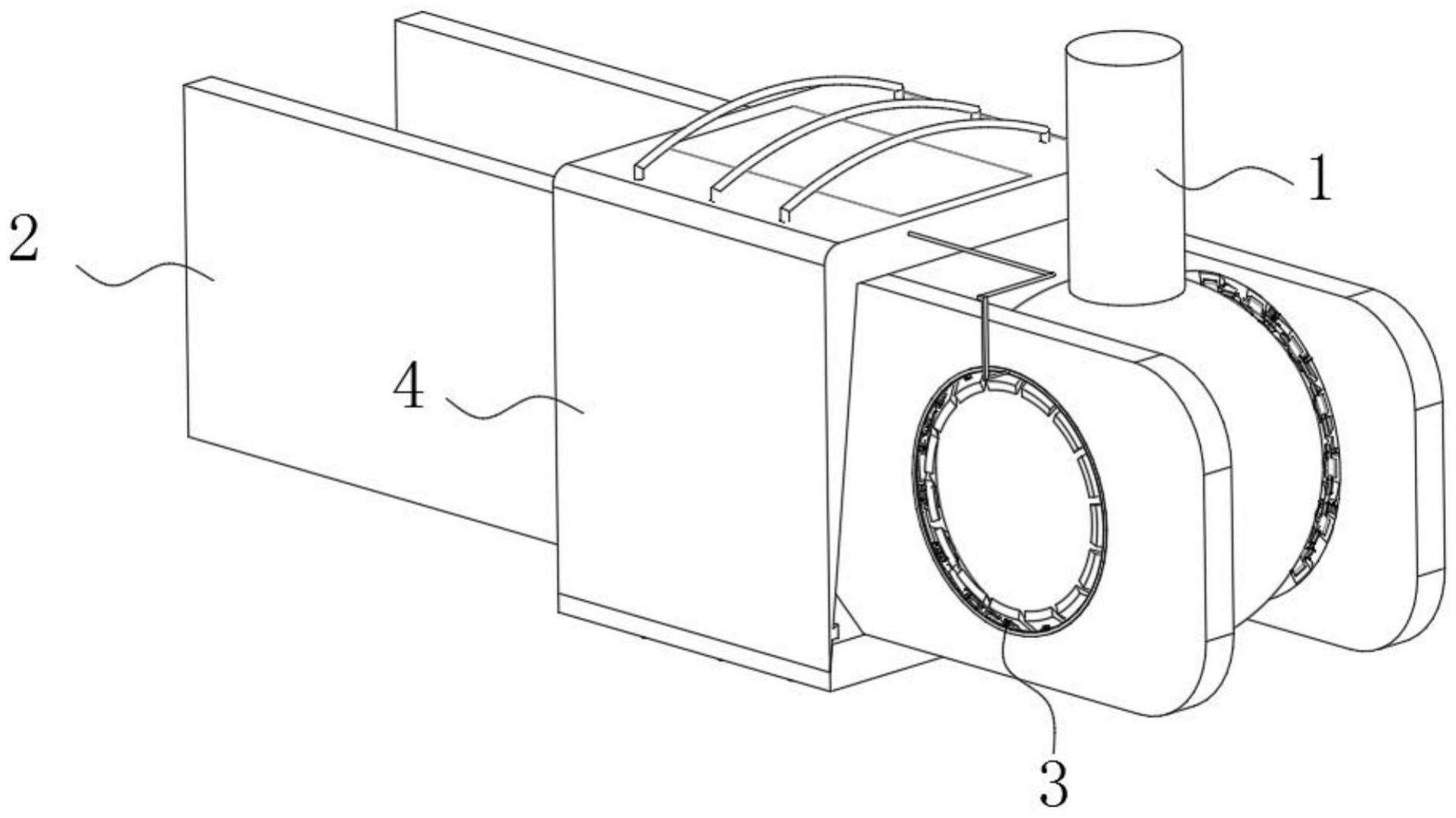
2、为了实现上述目的,本发明提供如下技术方案:一种智能制造车间生产线的工业机器人,包括机体,所述机体上设置有电机驱动臂,还包括:
3、固定球,其设置于电机驱动臂上;
4、固定板,其上开设有环形槽;
5、间隙补偿机构,其包括呈圆周阵列设置于所述环形槽上的多个移动板,所述移动板上转动连接有转球,所述移动板受驱远离所述环形槽,以驱使所述转球贴合所述固定球。
6、作为优选的,所述移动板移动路径具有一平移行程及一翻转行程,且其行至所述平移行程终止位后切换至翻转行程。
7、作为优选的,所述环形槽上设置有固定座,所述移动板和所述固定座之间转动连接有转动铰链。
8、作为优选的,还包括润滑组件,所述润滑组件包括开设于所述固定板上的润滑通道,所述润滑通道固定连通所述移动板,所述移动板受驱移动,以抽吸所述润滑通道内的润滑油。
9、作为优选的,所述润滑通道和所述移动板之间固定连通有波纹管。
10、作为优选的,所述移动板上转动连接有转球、对称设置有张力滞留板,所述张力滞留板使润滑油滞留于转球上。
11、作为优选的,所述固定板和所述移动板之间设置有第二弹簧,所述第二弹簧间隙内分别设置有粗弹性管和细弹性管。
12、作为优选的,所述固定板上设置有紧固卡扣组,所述紧固卡扣组包括相互卡接的外卡扣和内卡扣,所述移动板受驱翻转,以驱使所述外卡扣和所述内卡扣相互靠近。
13、作为优选的,所述外卡扣和内卡扣上均设置有膨胀气囊、牵拉绳,所述膨胀气囊受驱膨胀,以驱使所述牵拉绳收紧推抵所述外卡扣和内卡扣。
14、作为优选的,所述固定板内设置有放气环,所述外卡扣和内卡扣上均设置有膨胀气囊,所述膨胀气囊和所述放气环固定连通,所述放气环受驱放气,以驱使所述膨胀气囊膨胀。
15、在上述技术方案中,本发明提供的一种智能制造车间生产线的工业机器人,具备以下有益效果:在固定板随动平台沿固定球转动时,由移动板代替环形槽贴合固定球进行摩擦,因为移动板能始终远离环形槽贴合固定球,能补偿其中一个或多个移动板磨损出的空隙以保证动平台的移动精度,并且由移动板上的转球贴合固定球,通过多个转球以点接触围绕的方式限制固定球,能减少固定球和固定板之间的摩擦力。
技术特征:
1.一种智能制造车间生产线的工业机器人,包括机体,所述机体上设置有电机驱动臂,其特征在于,还包括:
2.根据权利要求1所述的一种智能制造车间生产线的工业机器人,其特征在于,所述移动板(31)移动路径具有一平移行程及一翻转行程,且其行至所述平移行程终止位后切换至翻转行程。
3.根据权利要求2所述的一种智能制造车间生产线的工业机器人,其特征在于,所述环形槽上设置有固定座(313),所述移动板(31)和所述固定座(313)之间转动连接有转动铰链(312)。
4.根据权利要求1所述的一种智能制造车间生产线的工业机器人,其特征在于,还包括润滑组件,所述润滑组件包括开设于所述固定板(2)上的润滑通道(21),所述润滑通道(21)固定连通所述移动板(31),所述移动板(31)受驱移动,以抽吸所述润滑通道(21)内的润滑油。
5.根据权利要求4所述的一种智能制造车间生产线的工业机器人,其特征在于,所述润滑通道(21)和所述移动板(31)之间固定连通有波纹管(33)。
6.根据权利要求5所述的一种智能制造车间生产线的工业机器人,其特征在于,所述移动板(31)上转动连接有转球(32)、对称设置有张力滞留板(311),所述张力滞留板(311)使润滑油滞留于转球(32)上。
7.根据权利要求1所述的一种智能制造车间生产线的工业机器人,其特征在于,所述固定板(2)和所述移动板(31)之间设置有第二弹簧(34),所述第二弹簧(34)间隙内分别设置有粗弹性管(341)和细弹性管(342)。
8.根据权利要求1所述的一种智能制造车间生产线的工业机器人,其特征在于,所述固定板(2)上设置有紧固卡扣组(4),所述紧固卡扣组(4)包括相互卡接的外卡扣(41)和内卡扣(44),所述移动板(31)受驱翻转,以驱使所述外卡扣(41)和所述内卡扣(44)相互靠近。
9.根据权利要求8所述的一种智能制造车间生产线的工业机器人,其特征在于,所述外卡扣(41)和内卡扣(44)上均设置有膨胀气囊(42)、牵拉绳(43),所述膨胀气囊(42)受驱膨胀,以驱使所述牵拉绳(43)收紧推抵所述外卡扣(41)和内卡扣(44)。
10.根据权利要求8所述的一种智能制造车间生产线的工业机器人,其特征在于,所述固定板(2)内设置有放气环(22),所述外卡扣(41)和内卡扣(44)上均设置有膨胀气囊(42),所述膨胀气囊(42)和所述放气环(22)固定连通,所述放气环(22)受驱放气,以驱使所述膨胀气囊(42)膨胀。
技术总结
本发明公开了一种智能制造车间生产线的工业机器人,包括机体,所述机体上设置有电机驱动臂,还包括:固定球,其设置于电机驱动臂上;固定板,其上开设有环形槽;隙补偿机构,其包括呈圆周阵列设置于所述环形槽上的多个移动板,所述移动板上转动连接有转球,所述移动板受驱远离所述环形槽。本发明提供的智能制造车间生产线的工业机器人,在固定板随动平台沿固定球转动时,由移动板代替环形槽贴合固定球进行摩擦,因为移动板能始终远离环形槽贴合固定球,能补偿其中一个或多个移动板磨损出的空隙以保证动平台的移动精度,并且由移动板上的转球贴合固定球,通过多个转球以点接触围绕的方式限制固定球,能减少固定球和固定板之间的摩擦力。
技术研发人员:沐春燕,沈家斌,李万清,李正林
受保护的技术使用者:扬州彦辉智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!