机器人的控制方法与流程
本发明涉及电气控制,特别涉及一种工业机器人的控制方法。
背景技术:
1、大型铸钢件体积庞大,在浇注过程中所形成的浇冒口尺寸也很大,人工切割这些冒口不仅危险系数高,工作量巨大而且耗材严重。另外因工作环境恶劣,劳动强度大也给企业带来了招工困难,安全管理压力大等诸多方面的问题。为解决此问题,当前采用的是机器人打磨或者切割的方法,但受限于机器人的作业模式,机器人打磨效率低,且有无法处理到的部位。
技术实现思路
1、有鉴于以上铸件清理工序采用机器人作业,打磨或者切割效率较低、精准度不足的问题,提出了一种机器人的控制方法,实现了铸件高效清理、精准清理的目的。
2、一种机器人的控制方法,所述控制方法为机器人的执行终端以空间直线的轨迹运行,缩短了作业的消耗时间,提升了机器人的作业效率,具体操作过程如下:
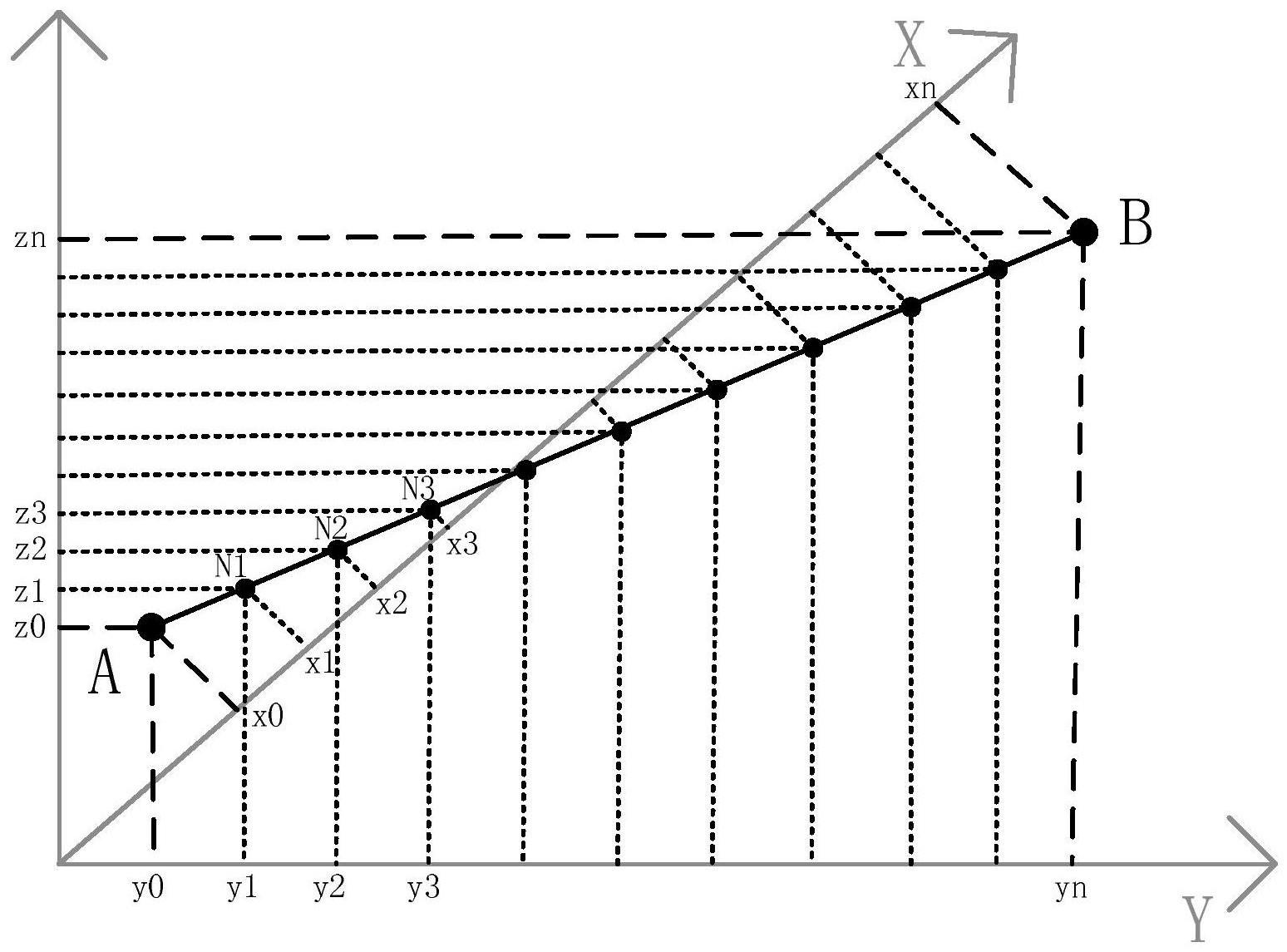
3、使机器人的执行终端行进至作业位置的起点,并记录起点位置a,所述起点位置a的具体坐标为a(x0,y0,z0);
4、使机器人的执行终端行进至作业位置的终点,并记录终点位置b,所述终点位置b的具体坐标为b(xn,yn,zn);
5、以直线连接所述起点位置a和所述终点位置b,记录两个位置的空间距离s;
6、将直线路径的所述空间距离s分为n小段;
7、所述机器人的执行终端从起点位置a逐次途径所述n小段到达终点位置b,实现了机器人的空间直线路径。
8、在另一种情况下,机器人无法以空间直线的轨迹运行,一种机器人的控制方法,所述控制方法为机器人的执行终端以空间曲线的轨迹运行,具体操作过程如下:
9、使机器人的执行终端行进至作业位置的起点,并记录起点位置a,所述起点位置a的具体坐标为a(x0,y0,z0);
10、使机器人的执行终端行进至作业位置的终点,并记录终点位置b,所述终点位置b的具体坐标为b(xn,yn,zn);
11、以曲线连接所述起点位置a和所述终点位置b,记录两个位置的空间距离s;
12、将曲线路径的所述空间距离s分为m小段,所述m小段以直线段的形式表现;
13、所述机器人的执行终端从起点位置a逐次途径所述m小段到达终点位置b,实现了机器人的空间曲线路径。
14、本发明技术方案的有益效果:通过预先确定机器人的执行终端作业的空间路径和行进的轨迹的方式,避免了作业的误操作和路径不明造成的运行轨迹过长的问题,缩短了作业的运行时间,提升了作业效率。
技术特征:
1.一种机器人的控制方法,其特征在于,所述控制方法为机器人的执行终端以空间直线的轨迹运行,具体操作过程包括,
2.如权利要求1所述的机器人的控制方法,其特征在于,所述将直线路径的所述空间距离s分为n小段步骤,包括,
3.如权利要求2所述的机器人的控制方法,其特征在于,所述步距a为等距,将所述空间距离s按照相等的步距a划分为若干等长度的n小段。
4.如权利要求2所述的机器人的控制方法,其特征在于,所述直线切割的具体步骤包括,
5.如权利要求1所述的机器人的控制方法,其特征在于,所述控制方法为机器人的执行终端以空间曲线的轨迹运行,具体操作过程包括,
6.如权利要求5所述的机器人的控制方法,其特征在于,曲线路径的所述空间距离s的连接步骤包括,
7.如权利要求6所述的机器人的控制方法,其特征在于,所述增量值h与所述直线步距b相等,使所述步距b尽可能靠近所述弧长d。
8.如权利要求6所述的机器人的控制方法,其特征在于,曲线切割的具体操作过程包括,
技术总结
一种机器人的控制方法,属于电气控制技术领域,用以解决机器人清理铸件打磨或者切割效率较低、精准度不足的问题,所述控制方法为机器人的执行终端以空间直线的轨迹运行,缩短了作业的消耗时间,提升了机器人的作业效率,具体操作过程如下:使机器人的执行终端行进至作业位置的起点,并记录起点位置A;使机器人的执行终端行进至作业位置的终点,并记录终点位置B;以直线连接所述起点位置A和所述终点位置B,记录两个位置的空间距离S;将直线路径的所述空间距离S分为n小段;所述机器人的执行终端从起点位置A逐次途径所述n小段到达终点位置B,实现了机器人的空间直线路径。缩短了作业的运行时间,提升了作业效率。
技术研发人员:孙伟,王腾,黄部东,刘建龙
受保护的技术使用者:共享智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!