基于动作记录分析的机械手控制系统的制作方法
本发明涉及机械手位置修正,具体地说,涉及基于动作记录分析的机械手控制系统。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,通过机械手带来代替人工操作,加快产品的生产,在机械手工作的过程中,会按照提前指定的程序进行执行,使机械手按照编程的要求进行运动,机械手的运动轨迹固定,可进行重复性以及精细化的工作。
2、机械手在工作的过程中,机械手内部的零件会因为结构磨损而出现一定的偏差,进而使机械手的运行轨迹出现一定的变化,而机械手的运行轨迹出现变化后,会影响机械手工作的精准度,当机械手执行的是精密的工作时,机械手运行轨迹的变化会导致机械手工作的精准度降低,进而影响产生的生产。
3、在机械手工作的过程中出现运动轨迹的变化时,工人无法及时的发现,工人只能从机械手生产的产品来进行观测,如此会造成部分产品出现不合格的情况发生,为了减少机械手在生产过程因出现轨迹变化而造成产品不合格的数量,故需要一种基于动作记录分析的机械手控制系统来对机械手的运行轨迹进行检测和修正,保证机械手可以正常的生产产品。
技术实现思路
1、本发明的目的在于提供基于动作记录分析的机械手控制系统,以解决上述背景技术中提出的问题。
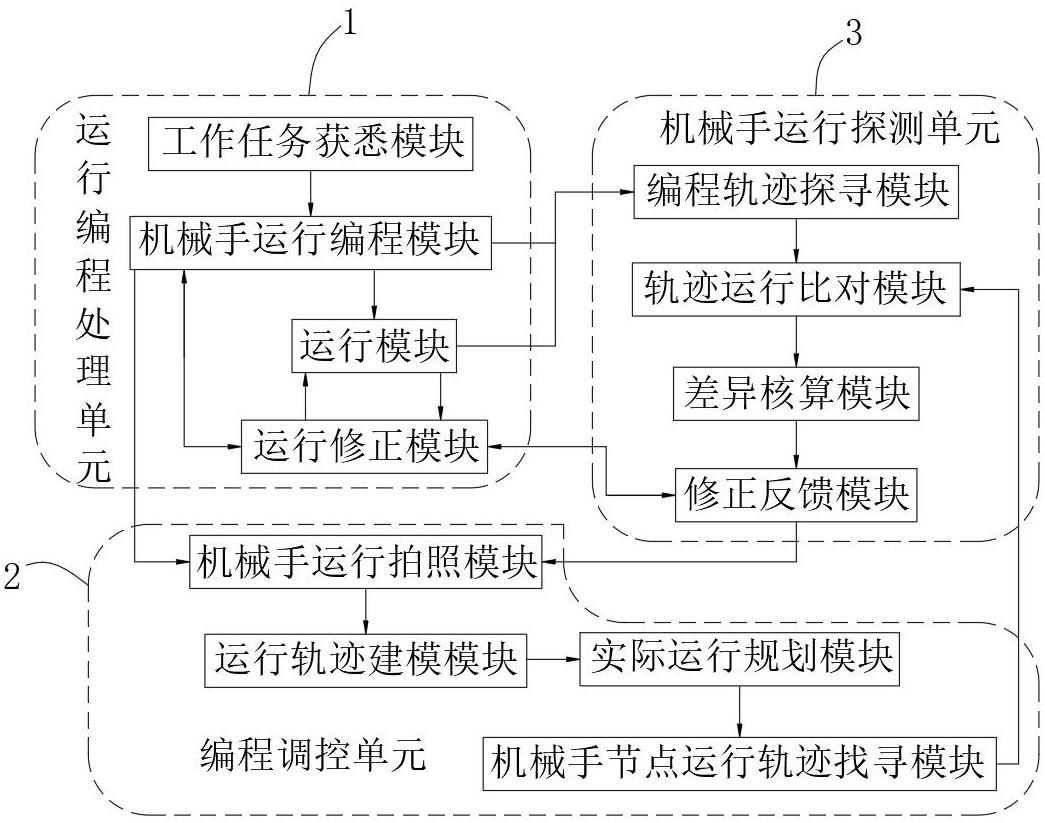
2、为实现上述目的,本发明提供基于动作记录分析的机械手控制系统,包括运行编程处理单元、机械手运行探测单元和编程调控单元;
3、所述运行编程处理单元根据机械手工作的任务,对机械手的运行轨迹进行编程,机械手根据编程的内部进行运行;
4、所述机械手运行探测单元对根据编程内容进行工作的机械手进行图像的捕捉,并根据捕捉的图像进行机械手工作状态的三维建模,同时根据建立的三维模型找寻机械手每个节点的运行轨迹;
5、所述编程调控单元将运行编程处理单元编程规定机械手每个节点运行的轨迹和机械手运行探测单元找寻到的机械手每个节点的运行轨迹进行对比,核对机械手每个节点运行轨迹的差异;
6、所述编程调控单元在核对机械手根据运行编程处理单元编程执行的运行以及机械手运行探测单元建模形成的运动轨迹,对运行中的机械手的运动轨迹向编程的轨迹上进行数据的修正,并将修正的数据向运行编程处理单元中传输,使运行编程处理单元根据修正的数据对机械手的运动进行修正,同时机械手运行探测单元对修正数据后的机械手进行三维建模,再由编程调控单元确定机械手的运行轨迹。
7、作为本技术方案的进一步改进,所述运行编程处理单元包括工作任务获悉模块、机械手运行编程模块和运行模块;
8、所述工作任务获悉模块采集机械手需要完成的任务,以及完成任务所需要通过路径;
9、所述机械手运行编程模块根据工作任务获悉模块获取的机械手的运行的轨迹进行对应指令的编程,编程的内容为机械手运动的轨迹,机械手通过编程所对应的内容,完成对物品指定操作;
10、所述运行模块将机械手运行编程模块编程的内容导入到机械手中,使机械手对编程的内容进行执行。
11、作为本技术方案的进一步改进,所述机械手运行探测单元包括机械手运行拍照模块、运行轨迹建模模块、实际运行规划模块和机械手节点运行轨迹找寻模块;
12、所述机械手运行拍照模块在收到运行模块对机械手进行控制运行时,通过摄像机对运行的机械手进行拍照,获取机械手工作的状态以及机械手在工作时的运行情况;
13、所述运行轨迹建模模块对机械手运行拍照模块采集到的图像进行处理,并根据图像中机械手工作状态进行机械手工作状态的三维建模;
14、所述实际运行规划模块根据运行轨迹建模模块建模出的多个机械手工作状态的模型,对机械手实际工作的运行情况进行规划;
15、所述机械手节点运行轨迹找寻模块根据实际运行规划模块规划出的机械手整体的运行轨迹,对机械手的每个活动节点的运行轨迹进行找寻,获取机械手上每个活动节点在完成指定操作的运行轨迹。
16、作为本技术方案的进一步改进,所述运行轨迹建模模块对机械手进行三维建模时,首先需要获取机械手的三维坐标,计算机械手的三维坐标采用立体摄影测量的算法,其公式内容为:
17、①、设机械手的三维坐标为,则对应的像点在两幅图像上分别为和;
18、②、设相机参考点在空间中的坐标分别为和,以及相机的内参矩阵和;
19、③、根据三角测量定位原理,得到以下两个公式:
20、;
21、;
22、其中,和表示相机旋转矩阵,和表示相机位置矩阵,代表向量的转置;
23、④、根据③中的两个公式获取机械手的三维坐标;
24、⑤、重复①、②、③、④中的步骤,获取机械手上各个对应点的三维坐标。
25、作为本技术方案的进一步改进,在获取所述机械手的三维坐标后,根据机械手的三维坐标对机械手进行三维建模,获取机械手在不同时刻的工作状态模型。
26、作为本技术方案的进一步改进,所述运行轨迹建模模块在获取机械手在不同时刻的工作状态模型后,实际运行规划模块根据运行轨迹建模模块建模的模型进行机械手实际运行的轨迹的规划,其规划步骤如下:
27、步骤一:获取运行轨迹建模模块对机械手进行三维建模的所有模型,并按照模型对应照片的拍照时间进行顺序的排序;
28、步骤二:根据模型排序的顺序,对机械手的运动状态进行判断,获取机械手的运动顺序,并根据机械手的运动顺序规划出机械手的实际运动情况。
29、作为本技术方案的进一步改进,所述机械手节点运行轨迹找寻模块对实际运行规划模块中规划的机械手的实际运动情况进行读取,并通过机械手的实际运动情况,找寻机械手活动节点的运动状态,并根据找寻到的机械手活动节点的运动状态规划出机械手活动节点的运行轨迹。
30、作为本技术方案的进一步改进,所述编程调控单元包括编程轨迹探寻模块、轨迹运行比对模块、差异核算模块和修正反馈模块;
31、所述编程轨迹探寻模块获取机械手运行编程模块中对机械手运行的编程信息,并根据编程内容获取编程内容中机械手活动节点的运行轨迹;
32、所述轨迹运行比对模块对编程轨迹探寻模块中获取机械手活动节点的编程轨迹以及机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹进行对比,确定两个轨迹是否出现位置的偏差;
33、所述差异核算模块根据轨迹运行比对模块对编程轨迹以及机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹的对比结果,计算两个轨迹之间差异的数据;
34、所述修正反馈模块接收差异核算模块计算出的数据差异,并计算出机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹转换到编程轨迹的差异数据。
35、作为本技术方案的进一步改进,所述差异核算模块在计算两个轨迹之间差异的数据时,存在两种情况:
36、情况一:编程轨迹以及机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹之间没有数据的差异,则差异核算模块不对机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹进行差异计算;
37、情况二:编程轨迹以及机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹之间存在数据的差异,则差异核算模块计算机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹转换到编程轨迹的差异数据,并将计算出来的差异数据传输到修正反馈模块中。
38、作为本技术方案的进一步改进,所述运行编程处理单元还包括运行修正模块,所述运行修正模块接收修正反馈模块传输来的机械手节点运行轨迹找寻模块规划出机械手活动节点的运行轨迹转换到编程轨迹的差异数据,并将差异数据传输到机械手运行编程模块中,由机械手运行编程模块根据差异数据对机械手运行的轨迹进行重新编程,并将编程的内容传输到运行模块中,由运行模块根据新编程的内容对机械手进行控制。
39、与现有技术相比,本发明的有益效果:
40、该基于动作记录分析的机械手控制系统中,通过设置的机械手运行探测单元对机械手的工作状态进行拍摄,并根据拍摄的内容部进行机械手运动状态的三维建模,并根据三维建模的内容获取机械手实际工作中活动节点的运行轨迹,再通过编程调控单元对编码轨迹和机械手实际工作中活动节点的运行轨迹进行对比,确定机械手的运行轨迹是否变化,并当机械手的运行轨迹发生变化后,编程调控单元对编码内容进行修正,并由运行编程处理单元根据编程调控单元修正的内容对机械手进行重新编码,使机械手修改后的运行轨迹符合工作要求,如此便避免了机械手出现运行轨迹偏移后对产品生产的问题,确保机械手对产品的正常生产。
- 还没有人留言评论。精彩留言会获得点赞!