一种机器人示教方法、系统、介质及设备
本发明属于机器人控制,具体涉及一种机器人示教方法、系统、介质及设备。
背景技术:
1、目前国外一些研究机构研究设计的示教器在技术上较为成熟,功能上也相对完善,同时其也具有较强的技术保密性。国内对工业机器人技术的研究虽然起步较晚,但随着工业自动化的需求不断增加,越来越多的高等院校、科研单位和生产企业均已投身到工业机器人的研发中,而示教器作为机器人控制系统的重要组成部分也得到了迅速的发展。
2、随着科技的进步,用户对工业机器人提出了更高的要求,机器人朝着智能化、多功能化、网络化方向发展。示教器作为机器人的人机交互终端,提供操作机器人的接口,其性能的好坏、操作系统的便捷性均直接影响用户的体验。
3、现有技术存在如下缺点:
4、1)由于机器人品牌种类繁多,各品牌机器人示教器差别较大,操作方式各不相同,造成工业机器人相关人才培养成本高昂,且不同品牌机器人的示教器只能用于控制对应品牌甚至是对应型号的机器人,示教器通用性不佳。
5、2)大部分品牌示教器使用windows ce作为系统载体,cpu处理性能有限,运算能力偏弱,功能模块可扩展能力差,缺乏仿真分析功能。
6、3)大多数示教器与机器人控制器仍然使用串口等有限连接方式,导致操作不便。
技术实现思路
1、为了克服上述技术缺陷,本发明提供了一种基于机器人示教方法,实现不同品牌的示教器和机器人之间的互通互用。
2、为了解决上述问题,本发明按以下技术方案予以实现的:
3、一种机器人示教方法,包括如下步骤:
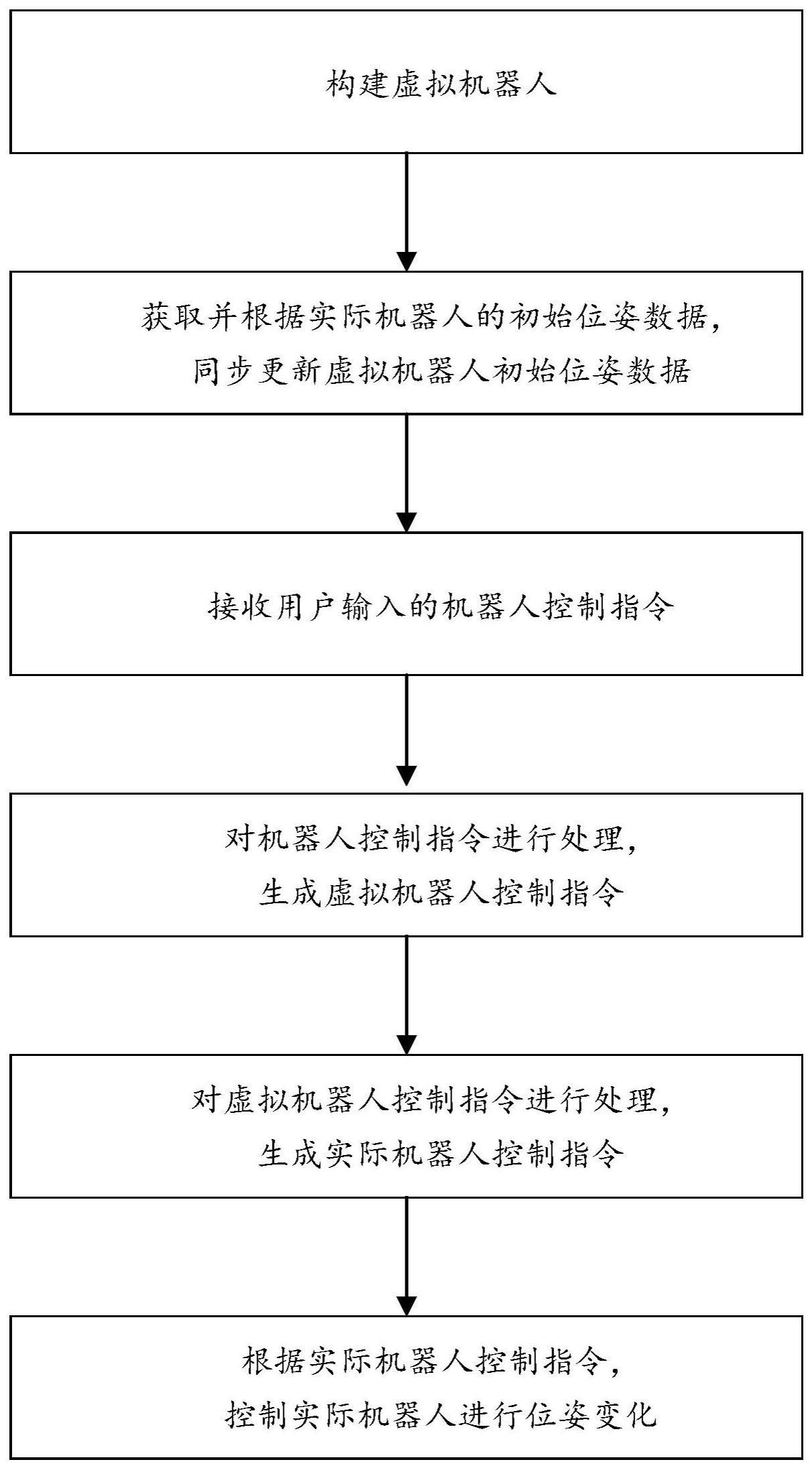
4、构建虚拟机器人;
5、获取并根据实际机器人的初始位姿数据,同步更新虚拟机器人初始位姿数据;
6、接收用户输入的机器人控制指令;
7、对机器人控制指令进行处理,生成虚拟机器人控制指令;
8、对虚拟机器人控制指令进行处理,生成实际机器人控制指令;
9、根据实际机器人控制指令,控制实际机器人进行位姿变化。
10、进一步的,初始位姿数据包括实际机器人的初始位置关节角与初始位置位姿点。
11、进一步的,步骤对机器人控制指令进行处理,生成虚拟机器人控制指令,包括如下步骤:
12、对机器人控制指令进行解释处理,获得指令参数;
13、根据指令参数、机器人末端位姿、机器人轨迹规划和机器人运动学,生成虚拟机器人控制指令。
14、进一步的,步骤对虚拟机器人控制指令进行处理,生成实际机器人控制指令,包括如下步骤:
15、对虚拟机器人控制指令进行数据处理,获得指令数据;
16、根据指令数据生成实际机器人控制指令。
17、进一步的,步骤根据实际机器人控制指令,控制实际机器人进行位姿变化后,还包括步骤:
18、根据实际机器人的位姿变化,同步更新虚拟机器人的位姿数据。
19、与现有技术相比,本发明具有以下有益效果:
20、本发明公开了一种机器人示教方法,对于来自不同品牌的示教器的的控制指令,都可以通过对输入的机器人控制指令进行处理生成虚拟机器人控制指令,再对虚拟机器人控制指令进行处理生成实际机器人控制指令,从而对不同品牌的机器人机器人进行控制,实现不同品牌的示教器和机器人之间的互通互用。
21、本发明还公开了一种机器人示教系统,包括:
22、虚拟示教器模块,用于接收用户输入的机器人控制指令;
23、虚拟仿真模块,用于构建虚拟机器人;同步更新虚拟机器人初始位姿数据;对机器人控制指令和虚拟机器人控制指令进行处理,生成实际机器人控制指令;根据实际机器人控制指令,控制实际机器人进行位姿变化;
24、实际机器人,用于根据实际机器人控制指令,进行位姿变化。
25、进一步的,虚拟仿真模块包括:
26、机器人控制指令处理单元,用于对机器人控制指令进行处理,生成虚拟机器人控制指令;
27、虚拟机器人控制指令处理单元,用于对虚拟机器人控制指令进行处理,生成实际机器人控制指令。
28、本发明还公开了一种计算机可读存储介质,其为计算机可读的存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的方法。
29、本发明还公开了一种计算机设备,包括:
30、处理器;
31、用于存储所述处理器可执行指令的存储器;
32、其中,所述处理器被配置为执行所述指令,以实现上述的方法。
技术特征:
1.一种机器人示教方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的机器人示教方法,其特征在于,初始位姿数据包括实际机器人的初始位置关节角与初始位置位姿点。
3.根据权利要求1所述的机器人示教方法,其特征在于,步骤对机器人控制指令进行处理,生成虚拟机器人控制指令,包括如下步骤:
4.根据权利要求1所述的机器人示教方法,其特征在于,步骤对虚拟机器人控制指令进行处理,生成实际机器人控制指令,包括如下步骤:
5.根据权利要求1所述的机器人示教方法,其特征在于,步骤根据实际机器人控制指令,控制实际机器人进行位姿变化后,还包括步骤:
6.一种机器人示教系统,其特征在于,包括:
7.根据权利要求6所述的机器人示教系统,其特征在于,虚拟仿真模块包括:
8.一种计算机可读存储介质,其特征在于,其为计算机可读的存储介质,其上存储有计算机程序,所述计算机程序被执行时实现如权利要求1-5中任一项所述的方法。
9.一种计算机设备,其特征在于,包括:
技术总结
本发明公开了一种机器人示教方法、系统、介质及设备,所述方法包括如下步骤:构建虚拟机器人;获取并根据实际机器人的初始位姿数据,同步更新虚拟机器人初始位姿数据;接收用户输入的机器人控制指令;对机器人控制指令进行处理,生成虚拟机器人控制指令;对虚拟机器人控制指令进行处理,生成实际机器人控制指令;根据实际机器人控制指令,控制实际机器人进行位姿变化。本发明对于来自不同品牌的示教器的的控制指令,都可以通过对输入的机器人控制指令进行处理生成虚拟机器人控制指令,再对虚拟机器人控制指令进行处理生成实际机器人控制指令,从而对不同品牌的机器人机器人进行控制,实现不同品牌的示教器和机器人之间的互通互用。
技术研发人员:李海艳,罗铤,唐国宝,陈余刚
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!