一种机器人躯关节位姿调整结构的制作方法
本发明涉及机器人躯关节运动,尤其涉及一种机器人躯关节位姿调整结构。
背景技术:
1、随着工业智能化飞速发展,机器人在我们的生活和工作中扮演着越来越多的角色,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作。
2、当机器人模拟人类进行下蹲、起身以及屈伸胳膊完成生产制造工作时,需要通过躯关节转动来完成,所以躯关节是机器人在执行动作的过程中的重要转动部件。执行动作过程中,需要具有自锁功能的结构临时锁定躯关节处于某个位姿状态,通常情况下,会选用涡轮蜗杆结构设置在躯关节处来实现,因为蜗轮蜗杆具有减速的功能,并且当蜗杆的螺旋角小于蜗杆蜗轮啮合齿间的当量摩擦角时就会自锁,以使躯关节达到自锁的功能,断电后躯关节仍然能保持原状。将蜗轮蜗杆组成单一组件用在机器人躯关节处时,虽然能够实现自锁,但是其工作效率就下降到20-30%,通常会采取加大电机驱动能力的措施,但是该措施会造成躯关节处的重量增加,对机器人全身的所有躯关节而言,会加大机器人整体的自身重量。
3、因此,以上凸显的问题是如果提高工作效率就会加大躯关节的重量,导致出现自锁结构存在工作效率与躯关节重量难以平衡的问题。
技术实现思路
1、为了解决上述自锁结构存在工作效率与躯关节重量难以平衡的问题,本发明提供了一种机器人躯关节位姿调整结构,通过传动组件驱动位姿调整轮在底板上转动。
2、为了达到上述目的,本发明是通过以下技术方案实现的:
3、一种机器人躯关节位姿调整结构,包括:
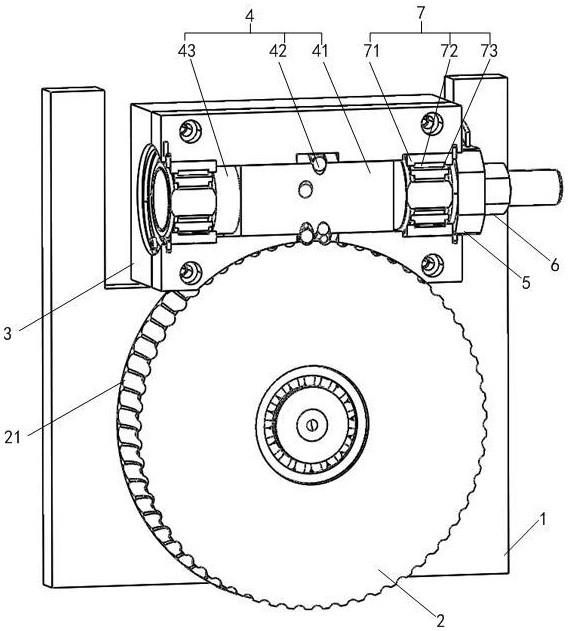
4、底板,与机器人的躯关节连接,用于辅助机器人的躯关节执行调节位姿的动作。
5、位姿调整轮,设置在底板的一侧,与底板的侧壁转动连接,用于在底板上转动。
6、传动组件,设置在位姿调整轮上,与位姿调整轮的圆周壁活动连接,用于通过转动驱动位姿调整轮转动,或停止转动时,与位姿调整轮通过自锁紧而锁定躯关节的位姿。
7、限位套,套设在传动组件上,且与传动组件适配,传动组件在限位套内转动,限位套用于阻止传动组件在转动过程中发生位移。
8、与现有技术相比,本发明具有以下优点:传动组件在限位套内通过转动驱动位姿调整轮转动,位姿调整轮带动躯关节转动,转动过程中,限位套通过适配的连接方式阻止传动组件发生移动。断电时,传动组件停止转动,并与位姿调整轮处于自锁紧状态,以此通过自锁功能对任意位姿进行限定,进而达到限定或调整位姿的目的,避免增加电机而加重躯关节重量,进而减轻机器人整体的重量,实现既提高工作效率又减轻重量的目的。
9、进一步优选为,位姿调整轮的圆周壁上设置有若干个轮槽,若干个轮槽毗邻连接。
10、采用上述技术方案,确保传动组件在轮槽上通过转动带动位姿调整轮转动,以调整躯关节的位姿。
11、进一步优选为,传动组件包括:
12、传动轴,位于限位套内,其一端与限位套的内部一端适配,另一端穿过限位套的另一端。
13、轴套,套设在传动轴的中部,与传动轴滚动连接,传动轴用于通过滚动驱动轴套转动。
14、采用上述技术方案,传动轴在外界动力的作用下转动,并通过滚动连接的方式转动带动轴套转动,为驱动位姿调整轮转动提供动力。
15、进一步优选为,传动轴上设置有滚珠链,滚珠链盘旋在轴套与传动轴之间,滚珠链从轴套的圆周壁上缠绕,穿过至传动轴,并缠绕在轴套的圆周壁上,用于将传动轴的动力传递至轴套的外壁上,以带动当位姿调整轮转动。
16、采用上述技术方案,通过滚珠链的链式传动,将传动轴上转动的动力传递至位姿调整轮上,实现链传动驱动位姿调整轮转动。
17、进一步优化为,轴套的圆周壁上开设有外滚槽,外滚槽呈螺旋状,滚珠链嵌入在外滚槽中,滚珠链与轴套的内壁滚动连接。
18、采用上述技术方案,滚珠链在螺旋状的外滚槽中随同轴套一起转动,通过链式传动方式传递传动轴的动力至位姿调整轮上,实现滚珠链进行盘绕式转动的同时驱动位姿调整轮转动。
19、进一步优化为,传动轴上的圆周壁上开设有内滚槽,内滚槽呈螺旋状,滚珠链嵌入在内滚槽中,滚珠链在内滚槽至外滚槽之间形成循环运动,以驱动位姿调整轮连续转动。
20、采用上述技术方案,滚珠链从外滚槽至内滚槽之间盘绕在轴套和传动轴上,在空间中形成盘绕状,随同传动轴转动的同时将动力从内滚槽传递至外滚槽中,并从轴套中转出,以驱动位姿调整轮转动,实现轴套、传动轴与位姿调整轮在非接触状态下驱动位姿调整轮转动,从而带动躯关节转动或停止在某个位姿状态,达到限定、调整位姿的目的,而且提高了工作效率。
21、进一步优化为,滚珠链包括多个滚珠,多个滚珠嵌入内滚槽内、外滚槽内,且相互抵接。
22、采用上述技术方案,由多个滚珠沿着的内滚槽和外滚槽相互抵接在一起构成的滚珠链,将传动轴上的动力传递至轴套之外的位姿调整轮,将链传动与滚动相结合,以此驱动位姿调整轮转动的目的。
23、进一步优化为,内滚槽的内壁、外滚槽的内壁均为弧面,滚珠的直径小于弧面的直径。
24、采用上述技术方案,以使滚珠能够放置在内滚槽和外滚槽中,并在内滚槽与外滚槽之间能够顺畅地运动,达到传递动力的目的。
25、进一步优化为,外滚槽上分别开设有:
26、第一连洞,位于外滚槽内部的一端,其直径大于滚珠的直径,且与内滚槽的一端对应,用于将从轴套上运动的滚珠输送至内滚槽中。
27、第二连洞,开设在外滚槽内部的另一端,在轴套的圆周壁上,与第一连洞的位置对应,且与内滚槽的另一端对应,用于接收来自内滚槽的另一端的滚珠,以此在外滚槽与内滚槽之间形成循环运动。
28、采用上述技术方案,在传递动力的过程中,滚珠链中的滚珠从内滚槽的一端进入第一连洞,通过第一连洞进入外滚槽中,以驱动位姿调整轮转动一定的角度,然后随同轴套的转动,从第二连洞进入内滚槽中,形成回流循环转动,实现由滚珠链回流式的循环运动带动位姿调整轮转动。
29、进一步优化为,内滚槽的螺旋线的圈数、外滚槽的螺旋线的圈数为至少1圈。
30、采用上述技术方案,使滚珠链在内滚槽与外滚槽之间形成一个完整的循环运动。
技术特征:
1.一种机器人躯关节位姿调整结构,其特征在于,包括:
2.根据权利要求1所述的机器人躯关节位姿调整结构,其特征在于,所述位姿调整轮(2)的圆周壁上设置有若干个轮槽(21),若干个所述轮槽(21)毗邻连接。
3.根据权利要求1所述的机器人躯关节位姿调整结构,其特征在于,所述传动组件(4)包括:
4.根据权利要求3所述的机器人躯关节位姿调整结构,其特征在于,所述传动轴(43)上设置有滚珠链(42),所述滚珠链(42)盘旋在所述轴套(41)与所述传动轴(43)之间,所述滚珠链(42)从所述轴套(41)的圆周壁上缠绕,穿过至所述传动轴(43),并缠绕在所述轴套(41)的圆周壁上,用于将所述传动轴(43)的动力传递至所述轴套(41)的外壁上,以带动当所述位姿调整轮(2)转动。
5.根据权利要求4所述的机器人躯关节位姿调整结构,其特征在于,所述轴套(41)的圆周壁上开设有外滚槽(411),所述外滚槽(411)呈螺旋状,所述滚珠链(42)嵌入在所述外滚槽(411)中,所述滚珠链(42)与所述外滚槽(411)的内壁滚动连接。
6.根据权利要求5所述的机器人躯关节位姿调整结构,其特征在于,所述传动轴(43)上的圆周壁上开设有内滚槽(431),所述内滚槽(431)呈螺旋状,所述滚珠链(42)嵌入在所述内滚槽(431)中,所述滚珠链(42)在所述内滚槽(431)至所述外滚槽(411)之间形成循环运动,以驱动所述位姿调整轮(2)连续转动。
7.根据权利要求6所述的机器人躯关节位姿调整结构,其特征在于,所述滚珠链(42)包括多个滚珠,多个所述滚珠嵌入所述内滚槽(431)内、所述外滚槽(411)内,且相互抵接。
8.根据权利要求6所述的机器人躯关节位姿调整结构,其特征在于,所述内滚槽(431)的内壁、所述外滚槽(411)的内壁均为弧面,所述滚珠的直径小于所述弧面的直径。
9.根据权利要求6所述的机器人躯关节位姿调整结构,其特征在于,所述外滚槽(411)上分别开设有:
10.根据权利要求9所述的机器人躯关节位姿调整结构,其特征在于,所述内滚槽(431)的螺旋线的圈数、所述外滚槽(411)的螺旋线的圈数为至少1圈。
技术总结
本发明公开了一种机器人躯关节位姿调整结构,包括:底板,与机器人的躯关节连接。位姿调整轮,设置在底板的一侧,与底板的侧壁转动连接。传动组件,设置在位姿调整轮上,与位姿调整轮的圆周壁活动连接,用于通过转动驱动位姿调整轮转动,或停止转动时,与位姿调整轮进行自锁紧。限位套,套设在传动组件上,且与传动组件适配,传动组件在限位套内转动,限位套用于阻止传动组件在转动过程中发生位移。断电时,传动组件停止转动,并与位姿调整轮处于自锁紧状态,通过自锁功能对任意位姿进行限定,进而达到限定或调整位姿的目的,避免增加电机而加重躯关节重量,减轻机器人整体的重量,实现既提高工作效率又减轻重量的目的。
技术研发人员:吴仁基
受保护的技术使用者:瑞基机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!