基于粘滑驱动的二自由度精密姿态调整装置及其驱动方法
本发明涉及精密定位,尤其涉及基于粘滑驱动的大行程二自由度精密姿态调整机构及其驱动方法。
背景技术:
1、随着机械科学、电子信息科学与光学科学等领域的高速发展与交叉融合,集成光、机、电等技术的微型机电产品在航空航天、尖端武器装备、微电子、生物医学等领域的应用需求激增。在这类产品的生产中,如何将具有不同三维几何结构和不同材料制造的跨尺度微小零件进行精密无损装配以形成空间复杂微机电系统是其制造中的关键环节。相较于传统显微镜辅助下的人工装配,采用高精度、多自由度定位平台(机器人)进行自动微装配具有一致性好、可靠性高等众多优点。然而,当前的空间多自由度定位平台存在空间姿态调整范围小、精度低等问题。除了微型装配技术领域,在基于视觉的微小零件三维形貌静动态测量等应用中,也亟需该类大行程高精度的空间姿态调整平台。
技术实现思路
1、本发明的目的是提供一种基于粘滑驱动的二自由度精密姿态调整装置及其驱动方法,该装置可以在保持小尺度的前提下有效解决目前空间多自由度定位平台存在的空间姿态调整范围小、精度低的问题,为后续精密微装配机器人研究和应用提供了新的思路,除此之外,还可以解决微小零件形貌三维动静态扫描时零件无法进行姿态调整的问题。
2、本发明至少通过如下技术方案之一实现。
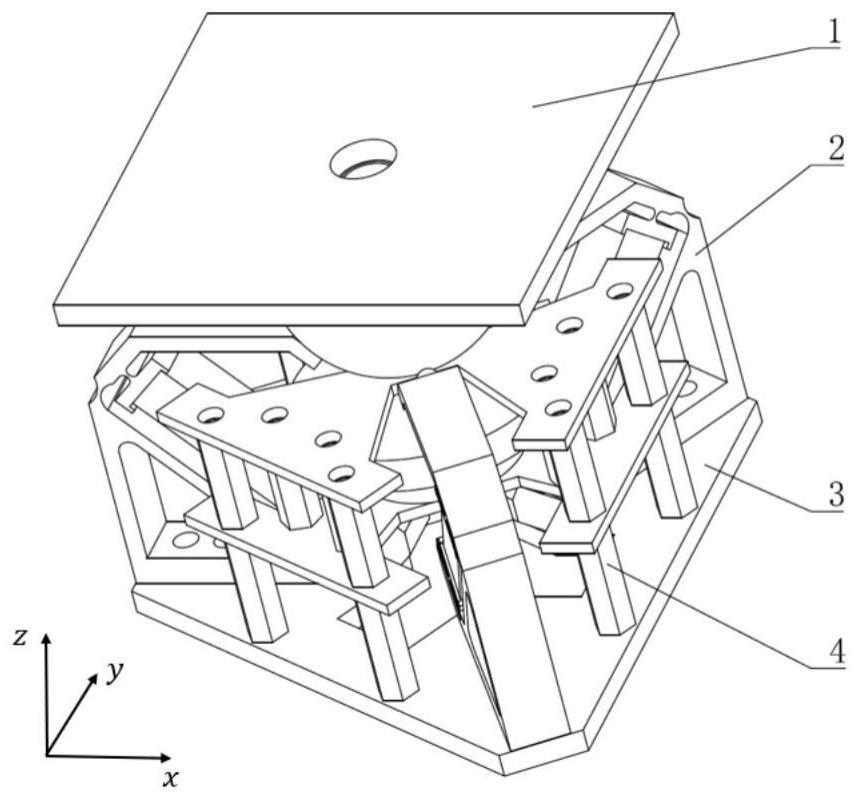
3、一种基于粘滑驱动的二自由度精密姿态调整装置,包括底部支撑平台、粘滑驱动机构模块、磁吸预压力模块和顶部加工平台模块;
4、粘滑驱动机构模块和磁吸预压力模块均设置在底部支撑平台上,粘滑驱动机构模块有个,呈三角排列,每个粘滑驱动机构模块均包括半球,所述磁吸预压力模块包括磁铁,且半球所处的位置高于磁铁所处的位置,顶部加工平台模块包括工件固定平台和设置在工件固定平台上的滚动球缺,滚动球缺支撑在三个半球上,磁吸预压力模块通过磁铁对滚动球缺吸力固定顶部加工平台模块,工作时,通过粘滑驱动机构模块的粘滑驱动推动顶部加工平台模块旋转。
5、优选的,所述滚动球缺依靠三点接触关系放置于粘滑驱动机构模块上,磁吸预压力模块的磁铁与滚动球缺之间产生吸力将顶部加工平台模块固定于三个粘滑驱动机构模块上。
6、更进一步的,所述滚动球缺表面加工有螺纹孔,工件固定平台通过螺栓固定于滚动球缺平面上,随滚动球缺在粘滑驱动机构模块的作用下一同转动。
7、优选的,所述粘滑驱动机构模块还包括柔顺放大机构、压电陶瓷叠堆和预紧件,所述柔顺放大机构固定于底部支撑平台上,压电陶瓷堆在预紧件的支撑下固定在柔顺放大机构中,压电陶瓷叠堆尾部开设有凹槽,半球固定在压电陶瓷叠堆尾部的凹槽中。
8、更进一步的,半球胶粘于压电陶瓷尾部的凹槽中。
9、更进一步的,柔顺放大机构采用柔顺铰链设计,加工材料选用7075铝合金,通过电火花线切割加工得到,柔顺放大机构内部包括四柔顺铰链,分别为一个杠杆式放大机构铰链、两个压电陶瓷随动铰链和一个预紧力支撑铰链。
10、更进一步的,预紧件装配于柔顺放大机构底部的螺纹孔中,柔顺放大机构的预紧力支撑铰链底部与预紧件连接,通过转动预紧件可以产生推动支撑铰链发生微小形变并产生沿压电陶瓷轴线方向的预紧力,可以有效地避免压电陶瓷叠堆伸长时在作用方向的反向产生削弱输出位移的缺点。
11、所述顶部加工平台模块固定于滚动球缺的顶部;所述柔顺放大机构安装于底部支撑平台上;所述半球胶粘于柔顺机构的凹槽中;所述滚动球依靠三点接触配合放置于三个带有半球的柔顺机构上;所述压电陶瓷叠堆依靠预紧件固定于柔顺放大机构上;所述的中部磁铁支撑台凭借中部支撑台铜柱固定于装置支撑台上;所述的顶部止动平台依靠顶部止动平台铜柱和磁铁限位柱固定于装置支撑台上;所述的磁铁通过顶部支撑台、磁铁限位柱和中部磁铁支撑台限位于滚动球的正下方,圆柱形磁铁的轴线于滚动球缺的圆心重合。
12、优选的,所述磁吸预压力模块还包括固定架,固定架固定在底部支撑平台上,磁铁固定在所述固定架上;固定架包括包括顶部止动平台、磁铁、止动平台固定铜柱、中部磁铁支撑平台、中部平台支撑柱、磁铁限位柱,磁吸预压力模块通过中部支撑平台铜柱固定于底部支撑平台上,中部磁铁支撑平台夹在中部平台支撑柱和止动平台固定铜柱、磁铁限位柱之间,顶部止动平台固定于止动平台固定铜柱和磁铁限位柱之上,而磁铁依靠磁铁限位柱、中部磁铁支撑平台和顶部止动平台限位于两平台之间。
13、优选的,三个粘滑驱动机构模块成120°角分别固定在底部支撑平台的三个角上,分别编号为i号粘滑驱动机构模块、ii号粘滑驱动机构模块和iii号粘滑驱动机构模块,每个粘滑驱动机构模块的压电陶瓷叠堆在正向锯齿波信号的驱动下运动,即慢速升压快速降压,经过柔顺机构将压电陶瓷叠堆的输出位移放大输入至红宝石球,再利用粘滑驱动原理,利用半球与滚动球缺之间的摩擦力实现滚动球缺绕接触点轴线的顺时针转动。
14、更进一步的,通过逆向锯齿波信号,即快速升压慢速降压,在粘滑驱动原理的作用下,可以实现滚动球缺绕接触点轴线的逆时针转动。
15、更进一步的,采用联合驱动的方式,即若需要沿i号粘滑驱动机构模块上半球与滚动球缺的切向方向依靠正锯齿波信号顺时针运动,那么ii号粘滑驱动机构模块和iii号粘滑驱动机构模块则可以通过反锯齿波信号带动整个平台分别沿各自的半球与滚动球缺的切向方向逆时针运动,从而根据运动的合成关系得到沿i号粘滑驱动机构模块支撑脚轴线方向的顺时针运动,增大旋转步长。
16、优选的,压电陶瓷叠堆外围有两根正负极的线,分别接至与信号发生器相连的功放的正负极上,信号发生器可以产生不同频率、不同占空比的锯齿波信号至功放,再由功放放大至驱动压电陶瓷叠堆所需要的电压信号,来控制压电陶瓷叠堆的伸缩长度与速度。
17、优选的,所述的半球与滚动球缺接触,由于半球表面结构特性的优势,可以减小粘滑驱动原理对滚动球表面的摩擦影响。
18、本发明还提供采用前述装置的驱动方法,包括步骤:
19、s1、先调节整个压电陶瓷叠堆的初始预紧力;
20、s2、将待加工件固定在顶部加工平台模块上;
21、s3、根据所需位姿,通过计算机模拟得到三个粘滑驱动机构模块需要运动的步长,即粘滑驱动所需锯齿波的个数;
22、s4、通过信号发生器将所需的锯齿波信号发送至压电陶瓷叠堆产生沿压电陶瓷叠堆轴向方向的伸缩;
23、s5、柔顺放大机构在压电陶瓷叠堆的推动下运动,并将压电陶瓷叠堆的位移放大,再通过半球与滚动球缺之间产生摩擦,在粘滑驱动原理的作用下实现顶部加工平台模块的旋转;
24、进一步地,采用粘滑驱动原理的驱动方法,在锯齿波的控制下将压电陶瓷的伸缩转化为球面上的旋转,进而实现加工平台2-dof的运动,粘滑驱动原理主要包括以下流程:
25、s1、t=0时刻,整个装置处于静止状态,滚动球缺(slider)位于与压电陶瓷堆(pa)连接的柔顺放大机构(driving object)上;
26、s2、t=0到t=t1时刻,控制电压由0v缓慢增长至vmax,压电陶瓷堆(pa)缓慢伸长带动柔顺放大机构(driving object)运动,由于滚动球缺(slider)存在一定的惯性,在静摩擦力的作用下会跟随柔顺机构一起转动;
27、s3、t=t1到t=t2时刻,控制电压由vmax快速降低至0v,压电陶瓷堆(pa)快速缩短带动柔顺放大机构(driving object)运动,由于滚动球缺(slider)存在一定的惯性,在滑动摩擦力的作用下不会跟随柔顺机构一起转动;
28、在锯齿波电压的驱动下,依靠粘滑驱动原理实现大范围转动。
29、与现有技术相比,本发明具有如下优点:
30、(1)在针对跨尺度微小零部件的多角度加工和装配工作时,可以通过固定于装置支撑台上的三个粘滑驱动机构模块的粘滑驱动推动顶部加工平台模块旋转,至待加工工件的待加工位置,依靠粘滑驱动原理驱动,使整个结构具有高分辨率和高精度的特点,整个旋转定位过程的精度也较高,从而实现与高精度的微装配机器人之间的配合。
31、(2)在针对加工面与加工面之间角度、位姿相差较大的加工和装配工作时,由于该装置采用的为滚动球缺底部三点接触固定的设计,可以在空间上实现90°大范围的偏转,从而满足大部分快尺度微小零部件零件的微装配需求。
32、(3)在针对复杂环境下的微装配加工工作时,由于该装置在能保证加工精度的前提下又有小型化结构的优势,可以适用于多种不同的加工环境,具有普适性。
33、(4)在针对基于视觉的微小零件三维形貌静动态测量等应用中,可以根据应用的需要可以保证高分辨率、高精度的条件下,在空间大范围内灵活的改变工件固定平台的俯仰角度和姿态。
- 还没有人留言评论。精彩留言会获得点赞!