连杆结构和机器人的制作方法
本发明涉及一种协作机器人领域,具体而言,涉及一种连杆结构和机器人。
背景技术:
1、目前,现有技术中的协作机器人关节模组之间通常采用连杆进行连接,可以实现复杂的任务和灵活的动作,由于协作机器人有多个关节,多个的关节之间分别有连杆连接,这些连杆可以与关节可以灵活的旋转和多样化的操作运动。由于连杆数量多且复杂为了减轻连杆自身重量,连杆一般设计为薄壁中空筒体结构,但是会降低连杆的结构强度。
2、然而,当协作机器人在运动过程中与外部障碍物发生碰撞时,连杆容易发生损坏,且协作机器人不能及时检测碰撞,从而控制协作机器人停止运动,以防止协作机器人进一步受损。
技术实现思路
1、本发明的主要目的在于提供一种连杆结构和机器人,以解决现有技术中的协作机器人的连杆容易损坏的问题。
2、为了实现上述目的,根据本发明的第一个方面,提供了一种连杆结构,包括连杆筒体和检测模块;检测模块包括防护层和压力传感部件,防护层设置在连杆筒体的外表面上,压力传感部件设置在防护层的内侧或嵌设在防护层上,以根据压力传感部件的检测结果判断连杆结构是否受到障碍物的碰撞。
3、进一步地,压力传感部件为压敏电阻,在防护层的外表面与障碍物发生碰撞时,压敏电阻的阻值发生变化,以根据压敏电阻的阻值的变化量判断连杆结构是否受到碰撞。
4、进一步地,压力传感部件为多个,多个压力传感部件相间隔地设置。
5、进一步地,多个压力传感部件分为多组,各组压力传感部件均包括多个压力传感部件,各组压力传感部件中的多个压力传感部件沿连杆筒体的轴向间隔分布;多组压力传感部件沿连杆筒体的周向分布。
6、进一步地,防护层包括多个独立设置的防护块,多个防护块与多个压力传感部件一一对应地设置,各个压力传感部件设置在相应的防护块上。
7、进一步地,防护层由柔性材料制成;和/或防护层为弧形板或筒体,防护层环绕连杆筒体设置。
8、进一步地,防护层与连杆筒体的外表面粘接;或者连杆结构包括捆绑件,捆绑件捆绑在防护层的外侧,以将防护层固定在连杆筒体。
9、进一步地,防护层与压力传感部件为一体结构;或者防护层上设置有安装槽,压力传感部件可拆卸地安装在安装槽内。
10、进一步地,连杆结构还包括:放大模块,放大模块与压力传感部件连接,以通过放大模块对压力传感部件的检测结果进行处理;判断模块和反馈回路,判断模块通过反馈回路与放大模块连接,以使放大模块将处理结果通过反馈回路传输至判断模块,以使判断模块根据处理结果判断连杆结构是否与障碍物发生碰撞。
11、根据本发明的第二个方面,提供了一种机器人,包括连杆结构和关节结构,连杆结构与关节结构连接,连杆结构为上述的连杆结构。
12、应用本发明的技术方案,为了提高机器人的连杆结构的防护性能,在连杆筒体的外表面上设置有检测模块,检测模块包括防护层和压力传感部件,压力传感部件设置在防护层的内侧或嵌设在防护层上,这样设置,当连杆结构与障碍物发生碰撞时能够根据检测模块的压力传感部件的检测结果判断连杆结构是否受到碰撞,从而向机器人的控制系统反馈信号,以及时控制机器人停止运作,从而防止连杆结构受到的损害进一步加深,以达到保护机器人的连杆避免持续受到损伤的目的,以解决现有技术中的协作机器人的连杆容易损坏的问题。
技术特征:
1.一种连杆结构,其特征在于,包括:
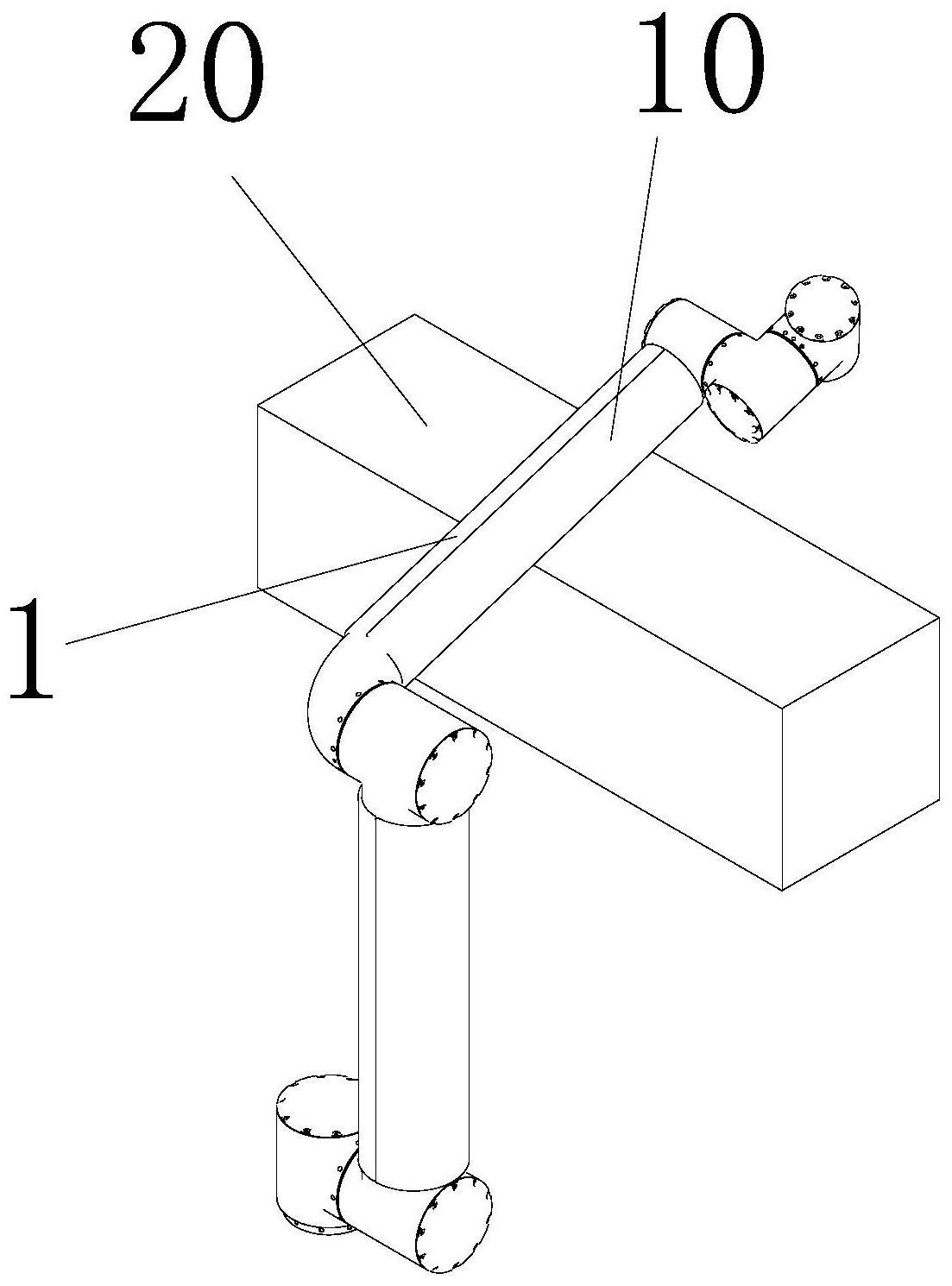
2.根据权利要求1所述的连杆结构,其特征在于,所述压力传感部件(12)为压敏电阻,在所述防护层(11)的外表面与所述障碍物(20)发生碰撞时,所述压敏电阻的阻值发生变化,以根据所述压敏电阻的阻值的变化量判断所述连杆结构是否受到碰撞。
3.根据权利要求2所述的连杆结构,其特征在于,所述压力传感部件(12)为多个,多个所述压力传感部件(12)相间隔地设置。
4.根据权利要求3所述的连杆结构,其特征在于,多个所述压力传感部件(12)分为多组,各组所述压力传感部件(12)均包括多个所述压力传感部件(12),各组所述压力传感部件(12)中的多个压力传感部件(12)沿所述连杆筒体(1)的轴向间隔分布;多组所述压力传感部件(12)沿所述连杆筒体(1)的周向分布。
5.根据权利要求2所述的连杆结构,其特征在于,所述防护层(11)包括多个独立设置的防护块,多个所述防护块与多个所述压力传感部件(12)一一对应地设置,各个压力传感部件(12)设置在相应的所述防护块上。
6.根据权利要求1所述的连杆结构,其特征在于,
7.根据权利要求1至6中任一项所述的连杆结构,其特征在于,
8.根据权利要求1至6中任一项所述的连杆结构,其特征在于,
9.根据权利要求1至5中任一项所述的连杆结构,其特征在于,所述连杆结构还包括:
10.一种机器人,包括连杆结构和关节结构,所述连杆结构与所述关节结构连接,其特征在于,所述连杆结构为权利要求1至9中任一项所述的连杆结构。
技术总结
本发明提供了一种连杆结构和机器人,该连杆结构包括连杆筒体和检测模块;检测模块包括防护层和压力传感部件,防护层设置在连杆筒体的外表面上,压力传感部件设置在防护层的内侧或嵌设在防护层上,以根据压力传感部件的检测结果判断连杆结构是否受到障碍物的碰撞,以解决现有技术中的协作机器人的连杆容易损坏的问题。
技术研发人员:黄建威,张志波,高小云,陈瑜若,张天翼
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!