杠杆式变刚度关节的刚度控制方法及外力估计方法与流程
本发明属于机器人变刚度关节,具体涉及一种杠杆式变刚度关节的刚度控制方法及外力估计方法。
背景技术:
1、本技术是申请日为2023年1月18日、申请号为2023100885343、发明名称为“一种变刚度关节外力估计方法和装置”的专利的分案申请。
2、刚度是变刚度关节中一个非常重要的因素,其直接影响着关节的性能指标,如外力估计分辨率、与外界交互的安全性、任务过程的动态适应性等。刚度低时,机器人与外界交互(机器人与人、机器人与环境)的安全性越高,此时基于弹性变形的外力估计分辨率越高,外力估计精度也越高;而刚度高时,由于变刚度关节在不同刚度下关节所允许的外力矩不同,刚度越高所能承受的外力矩越大,适合较大外力矩的情况(如果一个较低的刚度承受较大的外力矩,即超过所允许范围的外力矩,会导致外力估计时力矩的饱和输出,不能真实反映当前的外力矩);对于稳定性要求就高的场合,刚度越高,稳定性也越高。在某个应用场合中,会对多个相互约束的、与刚度有关的性能指标提出要求,各个指标的权重有一定的差异,此时,需要通过对刚度进行控制,以获取满足要求的综合性能指标。
3、因此,如何调节关节刚度特性,以满足不同应用场合下的性能指标要求,是物理交互类机器人与外部环境交互接触运行控制过程中亟需解决的一项重要问题。
4、另外,在复杂的交互任务中,高精度外力自感知是未来重要的发展方向。目前机器人的外力自感知更多是依赖于电流信息,例如,中国专利201410112717.5,202210279718.3,202210207511.5等所公布的外力估计方法,均需要建立能够体现电流与外力映射关系的动力学模型,但该方式受动力学模型准确程度影响较大。此外,对于变刚度关节来说,其采用了位置电机和刚度调节电机双驱动的配置形式,动力学模型的复杂程度以及动态未建模残余部分制约着外力估计效果。
5、由于变刚度关节具有内部柔顺性能,还可通过检测关节内部弹性变形估计外力,但是该方法在准静态刚度下具有较好的外力估计效果,在动态刚度下,其外力估计效果往往较差。
6、因此,如何实现变刚度关节的高精度的外力估计,是亟待解决的问题。
技术实现思路
1、针对现实应用中需要精准控制变刚度关节的关节刚度以满足某些特性的需要以及现有相关技术的缺乏,本发明提供了一种杠杆式变刚度关节的刚度控制方法,能够在杠杆式变刚度关节系统中实现获取刚度数值,以便于精准量化变刚度关节在运动控制过程中的关节形变状况,并实时控制关节刚度以满足不同任务下性能指标的要求。
2、针对现有技术中,需要实现杠杆式变刚度关节的高精度的外力估计的问题,本发明提供了一种杠杆式变刚度关节外力估计方法,提高了动态刚度下外力估计分辨率,能够精准的实现变刚度关节的高精度的外力估计。
3、具体的,本发明是通过以下技术手段实现上述技术目的的。
4、本发明第一方面提供了一种杠杆式变刚度关节的刚度控制方法,包括以下步骤:
5、设计刚度区域控制器,基于上一时刻外力估计值和最大外力矩约束,计算出刚度变量期望值;
6、将刚度变量期望值作用于刚度调节电机的运动控制,获得刚度变量实际值;
7、将刚度变量实际值代入刚度模型中,得到更新后的刚度数值,其中,刚度模型为刚度变量的函数。
8、在第一方面的一种实施例中,设计刚度区域控制器,基于上一时刻外力估计值和最大外力矩约束,计算出刚度变量期望值,包括:
9、基于李雅普诺夫屏障函数,设计刚度区域控制器;
10、对于杠杆式变刚度关节,用于刚度区域控制器的李雅普诺夫屏障函数表示为:
11、
12、其中,η表示函数变量,η=|τq|/τem-η0;η0、η1、η2均是正常数而且满足η0=η2=0.5,η1<0.5;τq表示估计的外力矩;τem表示特定刚度变量γ下关节最大的允许外力矩,与刚度变量γ有关;|τq|/τem的取值范围为[0,1];
13、基于李雅普诺夫屏障函数,将刚度调节划分为三个区域,即刚度增加区域、刚度减小区域及恒刚度区域;
14、根据李雅普诺夫屏障函数涉及的区域,将其导数表示为:
15、
16、设计合适的使其满足以保证η处在恒刚度区域中,的表达式为:
17、
18、其中,kη为表示杠杆式变刚度关节的刚度从刚度增加区域或者刚度减小区域进入到恒刚度区域快慢的常数,且kη大于0;
19、根据η的定义将η的导数表达为:
20、
21、其中,表示杠杆式变刚度关节刚度变量γ的导数;
22、进一步整理后,获得的表达式:
23、
24、在一种实施例中,基于李雅普诺夫屏障函数,将刚度调节划分为三个区域时,依据的是李雅普诺夫屏障函数的参数η;
25、当η>η1时,为刚度增加区域;
26、当η<-η1时,为刚度减小区域;
27、当-η1<η<η1时,为恒刚度区域。
28、本发明第二方面还提供一种自适应融合系数获取方法,包括:
29、采用前述的杠杆式变刚度关节的刚度控制方法实时获取刚度数值;
30、将获取的刚度数值代入自适应融合系数模型中进行解算,获得自适应融合系数;所述适应融合系数模型为:
31、
32、其中,表示关节刚度k导数的绝对值,rw1和rw2均为正常数,满足rw2>rw1。
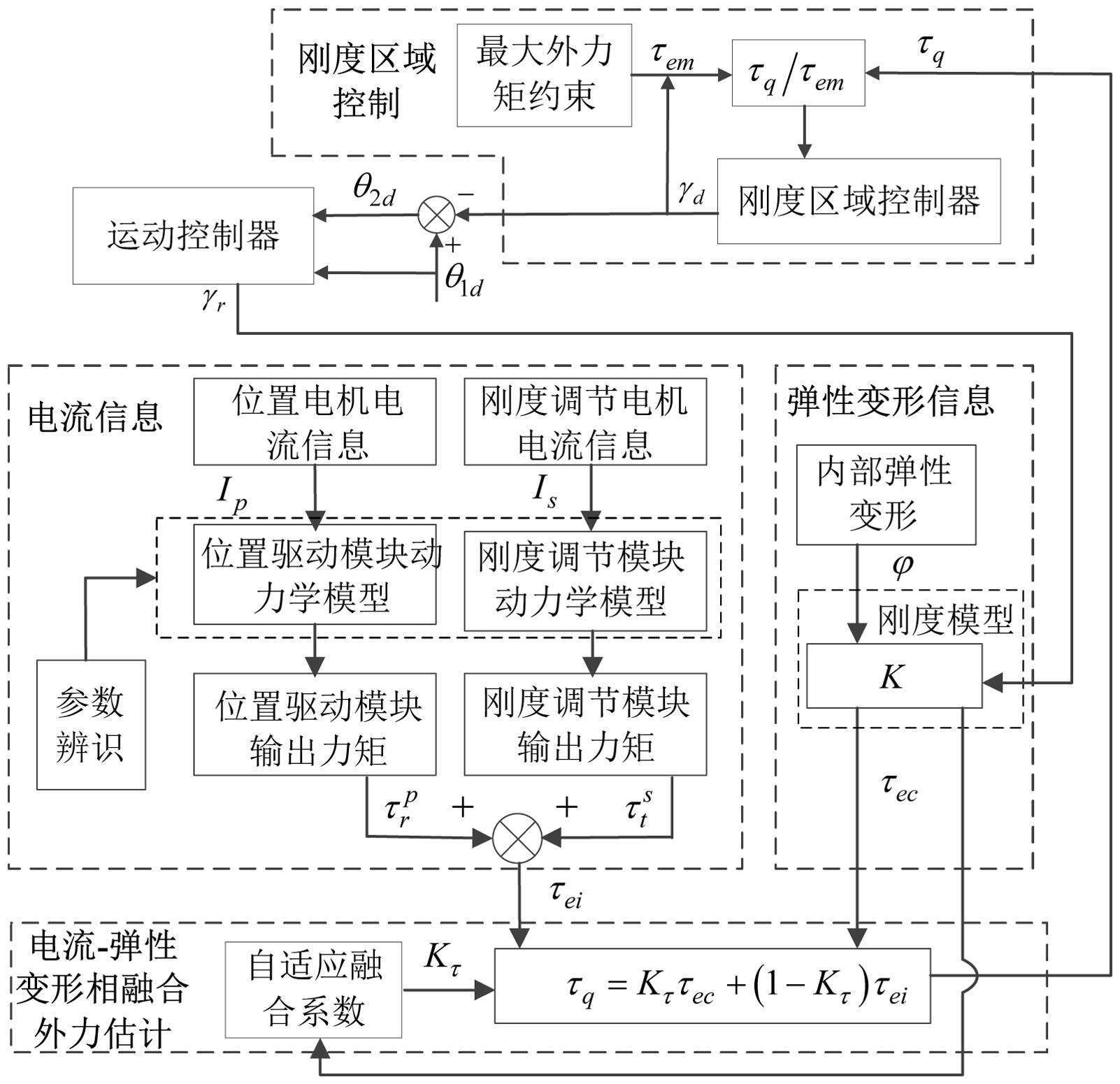
33、本发明第三方面提供一种变刚度关节外力估计方法,包括以下步骤:
34、采用所述的自适应融合系数获取方法实时获取自适应融合系数;
35、基于变刚度关节的电流信息获取外力估计i;
36、基于变刚度关节的弹性变形信息和刚度数值获取外力估计ii,所述外力估计ii的表达式为:
37、
38、其中,k(γ)表示刚度数值,表示关节内部弹性变形;
39、基于自适应融合系数、外力估计i和外力估计ii,获得基于电流和弹性变形信息相融合的外力估计值:
40、τq=kττei+(1-kτ)τec
41、其中,τei为外力估计i,τec为外力估计ii,kτ为自适应融合系数。
42、在具体实施时,所述基于变刚度关节的电流信息获取外力估计i,包括:
43、建立位置驱动模块和刚度调节模块的动力学模型:
44、
45、其中,和分别表示位置驱动模块和刚度调节模块的转动惯量;和分别表示位置驱动模块和刚度调节模块的摩擦力;和分别表示位置驱动模块和刚度调节模块的输出力矩;和分别表示位置驱动模块和刚度调节模块的输入力矩;θ1和θ2分别表示位置驱动模块和刚度调节模块的输出角度位移;
46、通过动力学参数辨识方法获取动力学模型中转动惯量和摩擦力的准确值;
47、测量位置电机和刚度调节电机的电流信息ip和is,根据如下公式计算位置驱动模块和刚度调节模块的输入力矩:
48、
49、其中,kpi和ksi分别表示位置驱动模块和刚度调节模块的总力矩常数;
50、将计算得到的位置驱动模块和刚度调节模块的输入力矩代入所述位置驱动模块和刚度调节模块的动力学模型中进行解算,得到位置驱动模块和刚度调节模块的输出力矩;
51、计算位置驱动模块和刚度调节模块的输出力矩之和,作为外力估计i:
52、
53、本发明与现有技术相比,具有突出的实质性特点和显著的进步,具体的:
54、本发明考虑到在不同刚度下关节的最大允许外力矩不同,基于最大外力矩约束和上一时刻外力估计值设计了一种刚度区域变量控制器,实现了刚度数值的动态更新,且刚度数值更接近实际刚度数值;通过动态调节刚度变量使得刚度处于恒刚度区域,保证了关节具有较小的刚度,同时避免了输出饱和力矩。
55、本发明基于刚度变量设计了自适应融合系数模型,自适应融合系数随刚度数值自主变化,可实现外力估计数值的光滑过渡,避免外力估计数值的跳动。
56、本发明基于实时获取刚度数值和测量的关节内部弹性变形,得出基于弹性变形信息的外力估计ii,提高了动态刚度下外力估计分辨率。
57、本发明所提出的外力估计方法,实现了基于电流的外力估计和基于弹性变形信息的外力估计的融合,弥补了单一外力估计方法的缺陷,提高了在动态和准静态刚度下的外力估计效果,适应于力交互场景下需要高精度外力估计的变刚度关节系统。
- 还没有人留言评论。精彩留言会获得点赞!