一种机器人保安控制系统的制作方法
本发明涉及保安机器人,具体为一种机器人保安控制系统。
背景技术:
1、保安机器人是用于维护社会治安、保卫国家财产和人民生命财产安全的机器人。可分为室内型和室外型两种,主要用于执行各种保安任务,包括巡逻放哨、岗位值班、停车收费员、系统可与各智能安防子系统(小区、企业、工厂、政府单位等楼宇对讲、门禁、访客系统、停车收费、监控、高空抛物摄像机、梯控、能源能耗、ba等系统)连接、火警和空气检测、威胁评估、情况判定、探测与阻止入侵者等。室内型主要应用于仓库和办公大楼等场合,而室外型则用于机场、仓库等主要地区。爆炸物处理机器人可用于探测并排除犯罪分子安放再机场、仓库等公共场所的炸弹和其他危险品,也可用于人质的解救工作。
2、经检索,申请号为201711350428.9的专利公开了一种智能保安巡逻机器人,该机器人采用陀螺仪的主机结构,在主机具有配重时,确保旋转体主机的配重面始终朝向地面,通过对地距离的检测,可防止机器人被拿起或倾覆,因而具有轻便小巧,成本低的优势,通过采用上述机器人的控制系统,可实现机器人的自主定位,实现行进路径和目标的指引,并具有温湿度、烟雾、失火、有毒气体、超大声响、快速物体移动、录音、录像、接近、碰触、搬动的本地声、光、电报警和自卫功能。
3、上述方案中的保安机器人只对设备本身的功能进行升级和加强,但是该机器人对于采集的图像、数据以及语音的处理能力不佳,且存储功能不齐全,不便于对采集的数据进行存储,不方便后期的查看以及多组数据的比对,并及时发现问题、解决问题,因此我们需要提出一种机器人保安控制系统。
技术实现思路
1、本发明的目的在于提供一种机器人保安控制系统,通过处理模块和数据存储模块的设计,其中,图像处理模块可对采集的图像灰度等级直方图处理、干扰抑制、边缘锐化和伪彩色处理以及调整图像的亮度、消除有害光线、抑制图像的噪声和提升图像的信噪比,数据处理模块将采集的数据与设定数据阈值比对,并存储每次采集的数据,方便后期的查看以及多组数据的比对,并及时发现问题、解决问题,语音处理模块可对采集的声音进行滤波处理,消除杂音和增强音频信号,以解决上述背景技术中提出的问题。
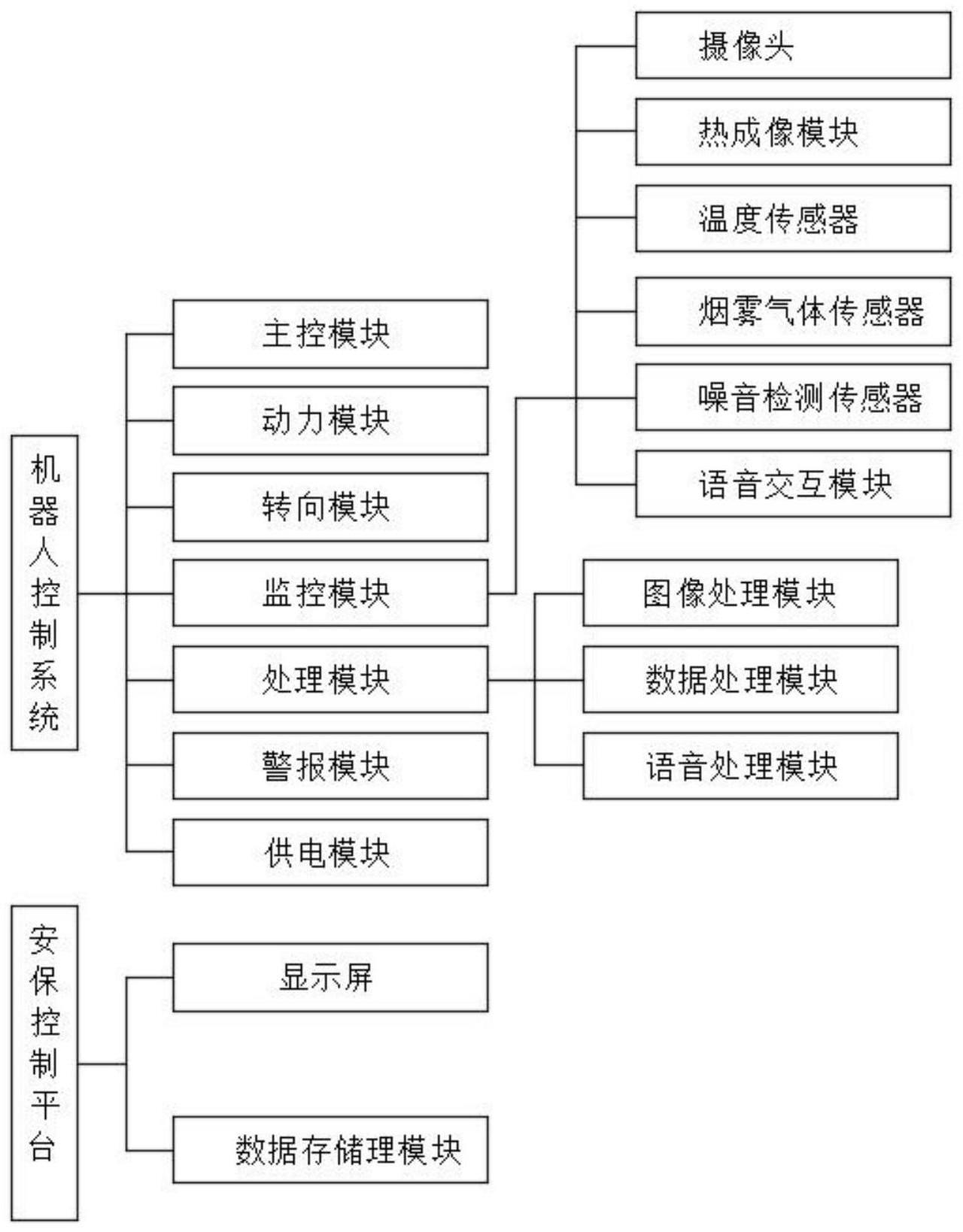
2、为实现上述目的,本发明提供如下技术方案:一种机器人保安控制系统,包括机器人控制系统和安保控制平台,所述机器人控制系统包括主控模块、动力模块、转向模块、监控模块、处理模块、警报模块和供电模块,所述主控模块分别与动力模块、转向模块、监控模块、处理模块、警报模块和供电模块连接,所述监控模块与处理模块连接,所述处理模块包括图像处理模块、数据处理模块、语音处理模块;
3、所述动力模块,用于控制机器人前进或后退,且动力模块设定有多个档位,用于调节机器人的行进速度;
4、所述转向模块,用于驱动机器人转弯,且转向模块驱动机器人转弯的转向角度为30°-40°;
5、所述监控模块,包括带红外夜视功能的摄像头、热成像模块、温度传感器、烟雾气体传感器、噪音检测传感器和语音交互模块,所述图像处理模块、数据处理模块和语音处理模块均与监控模块连接;
6、所述警报模块,包括用于声光报警的蜂鸣器和警报灯;
7、所述安保控制平台包括显示屏和数据存储模块,所述显示屏与图像处理模块电连接,所述数据存储模块与数据处理模块电连接,所述语音交互模块与语音处理模块电连接。
8、优选的,所述动力模块可设定的档位包括第一档位、第二档位、第三档位和倒档,机器人的行进速度为1-15km/h,其中,第一档位的行进速度为1-5km/h,第二档位的行进速度为6-10km/h,第三档位的行进速度为11-15km/h,倒档的后退速度为1-5km/h。
9、优选的,所述摄像头设为可调节转动式的摄像头,所述摄像头在水平方向上的最大转动角度为180度,所述摄像头在竖直方向上的最大转动角度为90度。
10、优选的,所述温度传感器用于监测机器人安保区域内的环境温度,所述烟雾传感器用于监测机器人安保区域内的烟雾浓度,所述噪音检测传感器用于监测机器人安保区域内的噪声分贝值。
11、优选的,所述图像处理模块包括图像预处理单元和图像二次处理单元,所述图像预处理单元将采集的图像数据进行解压,并对样本数据做数据增强,数据增强包括灰度等级直方图处理、干扰抑制、边缘锐化和伪彩色处理;所述图像二次处理单元采用光学模块和图像处理模块调整图像的亮度、消除有害光线,以及抑制图像的噪声、提升图像的信噪比。
12、优选的,所述数据处理模块可对机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值设定阈值,所述数据处理模块包括数据采集单元和数据处理单元,所述数据采集单元用于采集机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值,所述数据处理单元用于对采集的环境温度、烟雾浓度以及噪音分贝值与设定的环境温度、烟雾浓度以及噪音分贝值的阈值进行比对分析,若采集的数据值大于设定的阈值,则将信号传递至主控模块,主控模块控制警报模块发出警报。
13、优选的,所述语音处理模块包括语音采集单元和语音处理单元,所述语音采集单元用于监测机器人安保区域内的声音,所述语音处理单元包括音频滤波器和音频增强器,所述音频滤波器用于对采集的声音进行滤波处理,消除杂音,所述音频增强器用于增强音频信号。
14、优选的,经图像处理模块处理后的图像显示在显示屏上,所述显示屏包括供电模组、显示模组和控制模组,所述显示模组包括led灯珠,所述供电模组用于为显示模组和控制模组提供电力,所述控制模组用于根据led灯珠的正向电压vf值生成电压控制信号,并将电压控制信号传输至供电模组,所述电压控制信号用于控制供电模组为led灯珠提供所需工作电压。
15、优选的,所述数据存储模块用于存储每次监测到的机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值。
16、优选的,所述语音交互模块包括语音识别单元、前置语音交互单元、tts语音引擎单元和基于微处理器的电路板,所述语音识别单元用于接收语音信息,并将语音数据发送给前置语音交互单元和tts语音引擎单元;所述前置语音交互单元用于接收语音识别单元发送的语音数据,所述电路板控制tts语音引擎单元对应语音数据做出语音交互。
17、与现有技术相比,本发明的有益效果是:
18、本发明通过处理模块和数据存储模块的设计,其中,图像处理模块可对采集的图像灰度等级直方图处理、干扰抑制、边缘锐化和伪彩色处理以及调整图像的亮度、消除有害光线、抑制图像的噪声和提升图像的信噪比,数据处理模块将采集的数据与设定数据阈值比对,并存储每次采集的数据,方便后期的查看以及多组数据的比对,并及时发现问题、解决问题,语音处理模块可对采集的声音进行滤波处理,消除杂音和增强音频信号。
技术特征:
1.一种机器人保安控制系统,其特征在于:包括机器人控制系统和安保控制平台,所述机器人控制系统包括主控模块、动力模块、转向模块、监控模块、处理模块、警报模块和供电模块,所述主控模块分别与动力模块、转向模块、监控模块、处理模块、警报模块和供电模块连接,所述监控模块与处理模块连接,所述处理模块包括图像处理模块、数据处理模块、语音处理模块;
2.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述动力模块可设定的档位包括第一档位、第二档位、第三档位和倒档,机器人的行进速度为1-15km/h,其中,第一档位的行进速度为1-5km/h,第二档位的行进速度为6-10km/h,第三档位的行进速度为11-15km/h,倒档的后退速度为1-5km/h。
3.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述摄像头设为可调节转动式的摄像头,所述摄像头在水平方向上的最大转动角度为180度,所述摄像头在竖直方向上的最大转动角度为90度。
4.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述温度传感器用于监测机器人安保区域内的环境温度,所述烟雾传感器用于监测机器人安保区域内的烟雾浓度,所述噪音检测传感器用于监测机器人安保区域内的噪声分贝值。
5.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述图像处理模块包括图像预处理单元和图像二次处理单元,所述图像预处理单元将采集的图像数据进行解压,并对样本数据做数据增强,数据增强包括灰度等级直方图处理、干扰抑制、边缘锐化和伪彩色处理;所述图像二次处理单元采用光学模块和图像处理模块调整图像的亮度、消除有害光线,以及抑制图像的噪声、提升图像的信噪比。
6.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述数据处理模块可对机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值设定阈值,所述数据处理模块包括数据采集单元和数据处理单元,所述数据采集单元用于采集机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值,所述数据处理单元用于对采集的环境温度、烟雾浓度以及噪音分贝值与设定的环境温度、烟雾浓度以及噪音分贝值的阈值进行比对分析,若采集的数据值大于设定的阈值,则将信号传递至主控模块,主控模块控制警报模块发出警报。
7.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述语音处理模块包括语音采集单元和语音处理单元,所述语音采集单元用于监测机器人安保区域内的声音,所述语音处理单元包括音频滤波器和音频增强器,所述音频滤波器用于对采集的声音进行滤波处理,消除杂音,所述音频增强器用于增强音频信号。
8.根据权利要求1所述的一种机器人保安控制系统,其特征在于:经图像处理模块处理后的图像显示在显示屏上,所述显示屏包括供电模组、显示模组和控制模组,所述显示模组包括led灯珠,所述供电模组用于为显示模组和控制模组提供电力,所述控制模组用于根据led灯珠的正向电压vf值生成电压控制信号,并将电压控制信号传输至供电模组,所述电压控制信号用于控制供电模组为led灯珠提供所需工作电压。
9.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述数据存储模块用于存储每次监测到的机器人安保区域内的环境温度、烟雾浓度以及噪音分贝值。
10.根据权利要求1所述的一种机器人保安控制系统,其特征在于:所述语音交互模块包括语音识别单元、前置语音交互单元、tts语音引擎单元和基于微处理器的电路板,所述语音识别单元用于接收语音信息,并将语音数据发送给前置语音交互单元和tts语音引擎单元;所述前置语音交互单元用于接收语音识别单元发送的语音数据,所述电路板控制tts语音引擎单元对应语音数据做出语音交互。
技术总结
本发明公开了一种机器人保安控制系统,包括机器人控制系统和安保控制平台,所述机器人控制系统包括主控模块、动力模块、转向模块、监控模块、处理模块、警报模块和供电模块,本发明通过处理模块和数据存储模块的设计,其中,图像处理模块可对采集的图像灰度等级直方图处理、干扰抑制、边缘锐化和伪彩色处理以及调整图像的亮度、消除有害光线、抑制图像的噪声和提升图像的信噪比,数据处理模块将采集的数据与设定数据阈值比对,并存储每次采集的数据,方便后期的查看以及多组数据的比对,并及时发现问题、解决问题,语音处理模块可对采集的声音进行滤波处理,消除杂音和增强音频信号。
技术研发人员:任海正
受保护的技术使用者:上海启丰电子科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!