运动解耦且位置正解符号化的三维平移操作手
本发明涉及并联操作手,尤其是一种运动解耦且位置正解符号化的三维平移操作手。
背景技术:
1、三维平移操作手可用于装配、搬运、涂装及连续焊接等领域,以下文献中公开了一些三维平移操作手:
2、[1]clavel r.a fast robot with parallel geometry[c]//proceedings ofthe 18th int.symposium on industrial robots,1988:91-100;
3、[2]李丽红,张发海,朱磊.2-cpr/upu三平移并联机构运动学分析与优化设计[j].机械传动,2022,46(10):64-70+76.2022.10.010;
4、[3]程强,李瑞琴.3-cpr并联机构的设计与工作空间优化[j].机械传动,2017(4):163-167;
5、[5]孟庆梅,李佳宇,李菊,邓嘉鸣,沈惠平.半对称三平移delta-cu并联机构运动误差分析与标定[j].农业机械学报,2021,52(01):393-400;
6、[6]沈惠平,赵一楠,许正骁,李菊,杨廷力.低耦合度半对称三平移并联机构拓扑设计与运动学分析[j].农业机械学报,2019,50(03):404-411+357;
7、[7]di gregorio,r.,and parenti-castelli,v.(may 16,2002)."mobilityanalysis of the 3-upu parallel mechanism assembled for a pure translationalmotion."asme.j.mech.des.june 2002;124(2):259–264;
8、[8]di gregorio,r.(february 14,2005)."kinematics of the translational3-urc mechanism."asme.j.mech.des.november 2004;126(6):1113–1117;
9、上述文献中的三维平移操作手一般不具有位置符号正解或位置符号正解难求、不具有运动不解耦或运动解耦性欠好,给其后续的工作空间分析、尺寸综合、实时运动控制、动平衡计算以及动力学分析带来不便。
技术实现思路
1、本发明要解决的技术问题是:为了解决现有技术中的三维平移操作手位置符号正解难求、不具有运动不解耦或运动解耦性欠好,给其后续的工作空间分析、尺寸综合、实时运动控制、动平衡计算以及动力学分析带来不便的问题,现提供一种运动解耦且位置正解符号化的三维平移操作手。
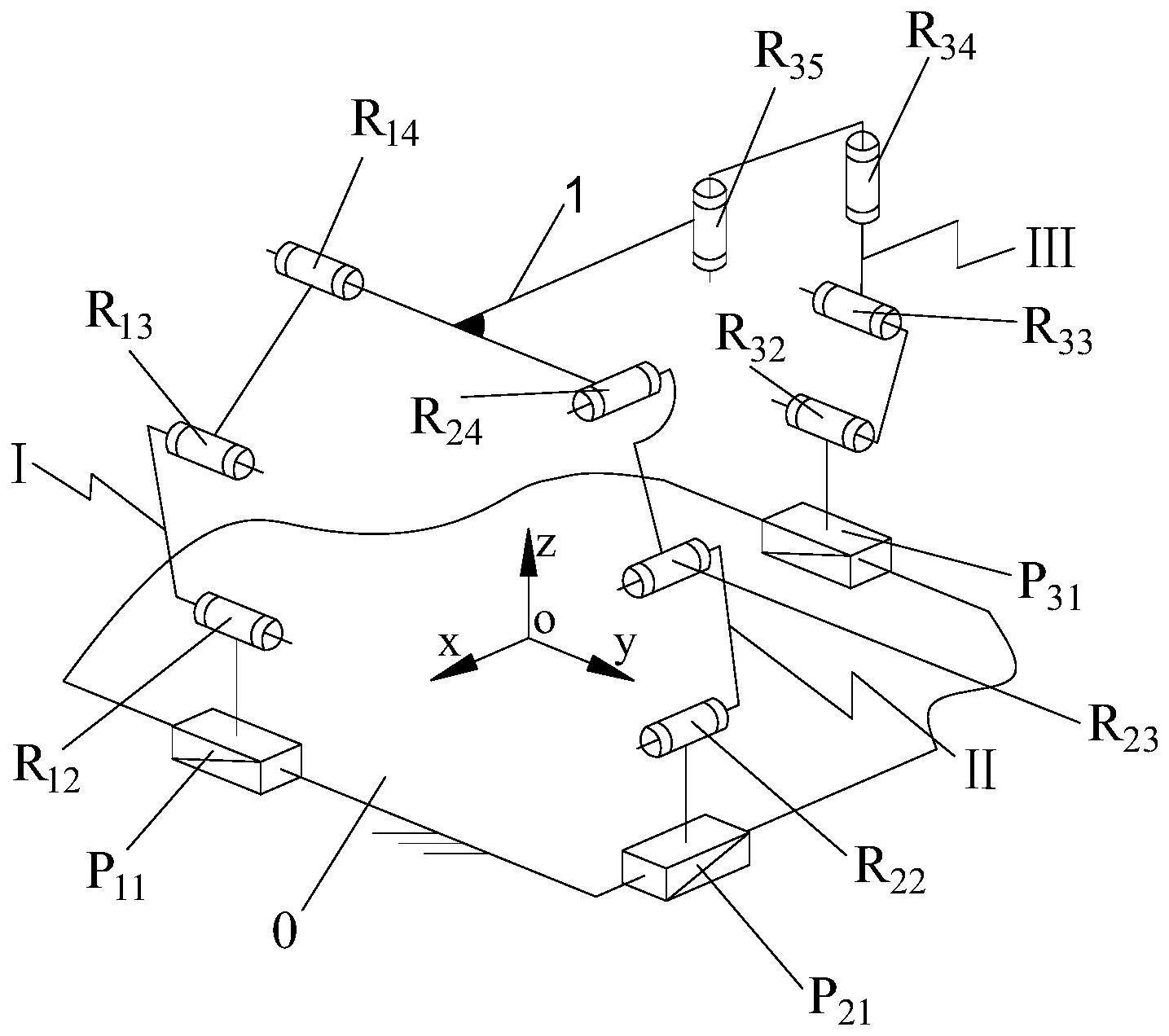
2、本发明解决其技术问题所采用的技术方案是:一种运动解耦且位置正解符号化的三维平移操作手,包括静平台、动平台、第一简单支链、第二简单支链和第三简单支链;
3、所述第一简单支链由移动副一、转动副一、转动副二及转动副三依次串联构成,所述移动副一的移动方向、转动副一的轴线、转动副二的轴线及转动副三的轴线相互平行,所述转动副三连接动平台的第一端;
4、所述第二简单支链由移动副二、转动副四、转动副五及转动副六依次串联构成,所述移动副二的移动方向、转动副四的轴线、转动副五的轴线及转动副六的轴线相互平行,所述转动副六连接动平台的第二端,且转动副六和转动副三的轴线相互垂直,所述转动副三的轴线通过转动副六的轴线;
5、所述第三简单支链由移动副三、子链一及子链二构成;子链一由轴线相互平行的转动副七和转动副八组成;子链二由轴线相互平行的转动副九和转动副十组成,所述移动副三、转动副七、转动副八、转动副九和转动副十依次串联,且移动副三的移动方向、转动副七的轴线和转动副八的轴线相互平行,所述转动副八的轴线和转动副九的轴线垂直,所述转动副十连接动平台的第三端,所述转动副三的轴线、转动副六的轴线及转动副十的轴线两两垂直;
6、所述移动副一、移动副二和移动副三均设置在静平台上,且移动副一的移动方向和移动副二的移动方向垂直,移动副一的移动方向和移动副三的移动方向平行。
7、进一步地,所述三维平移操作手的自由度为三,所述移动副一、移动副二和移动副三为驱动副时,动平台可以实现空间三维移动的输出运动;
8、所述移动副一的移动方向和移动副三的移动方向均与y轴方向平行,移动副二的移动方向与x轴方向平行,x轴方向、y轴方向及z轴方向彼此垂直;
9、所述移动副一的输入决定了动平台在y轴方向上的位移,移动副二的输入决定了动平台在x轴方向上的位移,动平台在z轴方向上的位移由移动副一、移动副二和移动副三的输入决定。
10、本发明还提供一种运动解耦且位置正解符号化的三维平移操作手,包括静平台、动平台、第一简单支链、第二简单支链和第三简单支链;
11、所述第一简单支链由移动副一、转动副一、转动副二及转动副三依次串联构成,所述移动副一的移动方向、转动副一的轴线、转动副二的轴线及转动副三的轴线相互平行,所述转动副三连接动平台的第一端;
12、所述第二简单支链由移动副二、转动副四、转动副五及转动副六依次串联构成,所述移动副二的移动方向、转动副四的轴线、转动副五的轴线及转动副六的轴线相互平行,所述转动副六连接动平台的第二端,且转动副六和转动副三的轴线相互垂直,所述转动副三的轴线通过转动副六的轴线;
13、所述第三简单支链由移动副三、子链一及子链二构成;子链一由轴线相互平行的转动副七和转动副八组成;子链二由轴线相互平行的转动副九和转动副十组成,所述移动副三、转动副七、转动副八、转动副九和转动副十依次串联,所述移动副三的移动方向和转动副七的轴线垂直,所述转动副八的轴线和转动副九的轴线垂直,所述转动副十连接动平台的第三端,所述转动副十的轴线与转动副三的轴线平行,所述转动副十的轴线与转动副六的轴线垂直;
14、所述移动副一、移动副二和移动副三均设置在静平台上,且移动副一的移动方向和移动副二的移动方向垂直,移动副一的移动方向和移动副三的移动方向平行。
15、进一步地,所述三维平移操作手的自由度为三,所述移动副一、移动副二和移动副三为驱动副时,动平台可以实现空间三维移动的输出运动;
16、所述移动副一的移动方向和移动副三的移动方向均与y轴方向平行,移动副二的移动方向与x轴方向平行,x轴方向、y轴方向及z轴方向彼此垂直;
17、所述移动副一的输入决定了动平台在y轴方向上的位移,移动副二的输入决定了动平台在x轴方向上的位移,动平台在z轴方向上的位移由移动副一、移动副二和移动副三的输入决定。
18、本发明还提供一种运动解耦且位置正解符号化的三维平移操作手,包括静平台、动平台、第一简单支链、第二简单支链和第三简单支链;
19、所述第一简单支链由移动副一、转动副一、转动副二及转动副三依次串联构成,所述移动副一的移动方向、转动副一的轴线、转动副二的轴线及转动副三的轴线相互平行,所述转动副三连接动平台的第一端;
20、所述第二简单支链由移动副二、转动副四、转动副五及转动副六依次串联构成,所述移动副二的移动方向、转动副四的轴线、转动副五的轴线及转动副六的轴线相互平行,所述转动副六连接动平台的第二端,且转动副六和转动副三的轴线相互垂直,所述转动副三的轴线通过转动副六的轴线;
21、所述第三简单支链由移动副三、子链一及子链二构成;子链一由轴线相互平行的转动副七和转动副八组成;子链二由轴线相互平行的转动副九和转动副十组成,所述移动副三、转动副七、转动副八、转动副九和转动副十依次串联,所述移动副三的移动方向和转动副七的轴线垂直,所述转动副八的轴线和转动副九的轴线垂直,所述转动副十连接动平台的第三端,所述转动副三的轴线、转动副六的轴线及转动副十的轴线两两垂直;
22、所述移动副一、移动副二和移动副三均设置在静平台上,且移动副一的移动方向和移动副二的移动方向垂直,移动副一的移动方向和移动副三的移动方向平行。
23、进一步地,所述三维平移操作手的自由度为三,所述移动副一、移动副二和移动副三为驱动副时,动平台可以实现空间三维移动的输出运动;
24、所述移动副一的移动方向和移动副三的移动方向均与y轴方向平行,移动副二的移动方向与x轴方向平行,x轴方向、y轴方向及z轴方向彼此垂直;
25、所述移动副一的输入决定了动平台在y轴方向上的位移,移动副二的输入决定了动平台在x轴方向上的位移,动平台在z轴方向上的位移由移动副一、移动副二和移动副三的输入决定。
26、本发明还提供一种运动解耦且位置正解符号化的三维平移操作手,包括静平台、动平台、第一简单支链、第二简单支链和第三简单支链;
27、所述第一简单支链由移动副一、转动副一、转动副二及转动副三依次串联构成,所述移动副一的移动方向、转动副一的轴线、转动副二的轴线及转动副三的轴线相互平行,所述转动副三连接动平台的第一端;
28、所述第二简单支链由移动副二、转动副四、转动副五及转动副六依次串联构成,所述移动副二的移动方向、转动副四的轴线、转动副五的轴线及转动副六的轴线相互平行,所述转动副六连接动平台的第二端,且转动副六和转动副三的轴线相互垂直,所述转动副三的轴线通过转动副六的轴线;
29、所述第三简单支链由移动副三、子链一及子链二构成;子链一由轴线相互平行的转动副七和转动副八组成;子链二由轴线相互平行的转动副九和转动副十组成,所述移动副三、转动副七、转动副八、转动副九和转动副十依次串联,所述移动副三的移动方向和转动副七的轴线垂直且在一个运动平面内,所述转动副八的轴线和转动副九的轴线垂直,所述转动副十连接动平台的第三端,所述转动副十的轴线与转动副六的轴线平行,所述转动副十的轴线与转动副三的轴线垂直;
30、所述移动副一、移动副二和移动副三均设置在静平台上,且移动副一的移动方向和移动副二的移动方向垂直,移动副一的移动方向和移动副三的移动方向平行。
31、进一步地,所述三维平移操作手的自由度为三,所述移动副一、移动副二和移动副三为驱动副时,动平台可以实现空间三维移动的输出运动;
32、所述移动副一的移动方向和移动副三的移动方向均与y轴方向平行,移动副二的移动方向与x轴方向平行,x轴方向、y轴方向及z轴方向彼此垂直;
33、所述移动副一的输入决定了动平台在y轴方向上的位移,移动副二的输入决定了动平台在x轴方向上的位移,动平台在z轴方向上的位移由移动副一、移动副二和移动副三的输入决定。
34、本发明的有益效果是:本发明的运动解耦且位置正解符号化的三维平移操作手其每条简单支链均单独配备一个驱动副,整体结构刚性好,结构不易变形,可适用于动平台负载要求高的场合,更为重要的是,移动副一和移动副二分别与动平台在x轴方向和y轴方向上的位移呈线性关系,从而具有很好的运动解耦性,容易得到符号式位置正解,使得该机构的运动学、运动控制与轨迹规划、动力学分析非常容易、方便,并且结构更简单。
- 还没有人留言评论。精彩留言会获得点赞!