一种油泥沉积罐底检测机器人自适应控制定位方法
一种油泥沉积罐底检测机器人自适应控制定位方法,属于储油罐作业。
背景技术:
1、储罐是石油石化领域中极为常见的存储设备,由于内部介质成分的复杂性,使储罐底板极易产生腐蚀现象,从而导致设备的失效。针对这一问题,通常每隔一定周期会对在油储罐底板进行检测与状态评估。但由于储罐底板经常会被各类油品遮盖,常规的检测手段极难顺利实施,通常需要开罐进行停工检修,耗时耗力且增加了成本。现有技术中,利用漏磁、声发射技术以及导波检测技术,并结合智能机器人的储罐底板在线检测机器人的开发被提上日程。
2、(1)申请号为202111314099.9,申请人为2021年11月8日,专利名称为“一种载油储罐底板检测机器人的定位方法”的中国发明专利公开了一种技术方案。在该技术方案中,在罐底作业机器人中心安装惯性传感器,用以获取机器人的行进方向。同时在机器人的前端和后端分别安装两组共4个超声传感器,4个传感器都位于机器人中轴线上,其中最前端与最后段两个传感器朝向外侧,中间两传感器相对安置。工作时,中间两距离已知的传感器用于测得声波速度,外侧两传感器用于回波测距,分别测得机器人前段和后端距离罐壁的直线距离。通过将距离之和以及机器人的行进方向进行结合,从而通过计算得到机器人的位置坐标。
3、然而在该技术方案中,由于需要在机器人中轴线位置安装4个超声传感器,由于其定位方法的特殊性,该方法所使用的4个传感器的位置需要精确确定,否则会因为安装角度或位置的微小偏差,对定位结果产生较大影响。并且该方法随着储罐直径的增大,产生的定位误差也会逐渐增大,只适合在小型储油罐当中使用。
4、(2)徐耀松.封闭空间液态场内声源定位方法研究[d].天津大学,2012.提供了一种技术方案,在该技术方案中,在罐外布置接收换能器基阵,接收罐内作业机器人发出的定位信号,测出声信号的传播时间,再利用声源发出信号至每个换能器的时间不同,获得机器人与各换能器之间的时差。声源信号到达两个换能器的时间差可以确定一对双曲线,则利用三个换能器即可形成两对双曲线,其交点即为声源位置。三维空间的机器人定位则需要四个接收换能器形成三对双曲线,其交点即为机器人位置。
5、在该技术方案中,由于定位接收换能器安装在储罐外部,此种方法会导致声信号在传播过程中经过罐壁以及罐内油品两种不同形态介质,由于声信号在不同介质中的传播特性不同,以及声信号穿过异质界面的复杂效应,会导致定位难度的增加并影响定位精度。同时,利用信号到达时间差方法来实现机器人定位会出现多值现象,即模糊,而且在噪声和误差较大的情况下可能会出现无解的情况。
6、不仅由于环境的特殊性,机器人在封闭液态环境中进行作业,难以观测到机器人位置,更无法获取检测探头具体位置。目前市面上大多水下定位产品都难以满足在油储罐内部的作业环境。而且机器人工作过程中需要保证探头与罐底距离保持不变,探头始终朝下且探头朝向与第二机械臂之间夹角保持不变,在对机器人进行定位之后,也难以进一步对探头的方位进行确定,特别是在储罐内,由于罐底布满油泥,因此难以保证机器人始终运行在水平状态下。所以设计一种能够对罐内液面以下的机器人进行精确定位,并进一步控制其第二机械臂,以保证探头处于所要求工作状态的技术方案,成为本领域亟待解决技术问题。
技术实现思路
1、本发明要解决的技术问题是:克服现有技术的不足,提供一种实现了信标的高度自适应调节,克服了罐底油泥导致机器人上下起伏对定位精度造成的影响,从而进一步对探头进行控制和定位,保证了探头始终处于所要求的工作状态的油泥沉积罐底检测机器人自适应控制定位方法。
2、本发明解决其技术问题所采用的技术方案是:该油泥沉积罐底检测机器人自适应控制定位方法,包括定位系统,定位系统包括与机器人相连的控制器,在机器人的前端通过机械臂安装有探头,其特征在于:包括如下步骤:
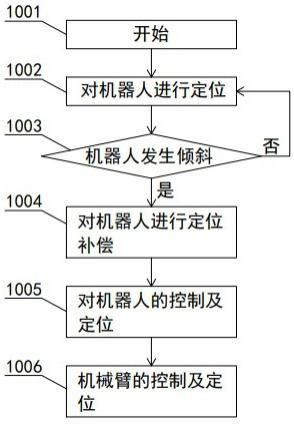
3、步骤a,将机器人通过油罐顶部的人孔放入,并在油罐顶部设置罐顶定位装置;
4、步骤b,控制器控制设置在机器人表面的定位机构与罐顶定位装置保持在同一高度,并通过罐顶定位装置对机器人进行定位,定位机构包括在机器人表面可垂直升降的信标;
5、步骤c,控制器判断机器人是否发生倾斜,如果发生倾斜,执行步骤d,如果未发生倾斜,返回步骤b;
6、步骤d,对机器人进行定位补偿,得到补偿后的机器人坐标以及;
7、步骤e,对机器人上探头控制及定位,使探头始终保持水平,并与油罐的罐底间隔设置;
8、步骤f,机器人机械臂的控制及定位;
9、步骤g,控制器判断是否检测到罐底缺陷,如果检测到罐底缺陷,返回罐底缺陷的坐标,如果未检测到罐底缺陷,返回步骤d。
10、优选的,所述的罐顶定位装置包括自罐顶处的人孔放入油罐内的至少三条定位杆,在每一条定位杆的底部设置有超声传感器,所有超声传感器与罐顶的距离相同。
11、优选的,机器人包括机器人本体,在机器人本体的中部向下设置容纳槽,定位机构安装在容纳槽中,定位机构包括安装在容纳槽内的升降架,在升降架的顶部设置有信标,自升降架的顶部还向后水平固定有固定杆,在固定杆的端部固定有声纳,声纳的探测端朝向正下方,用于检测信标与罐底之间的竖直距离,信标与超声传感器处于同一高度。
12、优选的,在所述的步骤b中,使定位机构与罐顶定位装置保持在同一高度的方法,包括如下步骤:
13、根据所述定位机构距离罐底的距离,对定位机构的高度进行自适应pid控制,pid控制的原理公式如下:
14、
15、其中:u(k)为pid控制的输出,表示系统输出的变化量;kp为比例系数,表示输出信号变化相对值与输入偏差信号变化相对值的比值;ki为积分系数;kd为微分系数,e(k)表示k时刻系统的输出值h(k)和目标值之差,即:
16、
17、原理公式中各系数表达式如下:
18、
19、其中:t为采样时间;ti为积分时间;td为微分时间。
20、优选的,所述的步骤d,包括如下步骤:
21、步骤d-1,获得机器人顶部至中心点距离j;
22、步骤d-2,得到机器人俯角或仰角为α的如下关系式:
23、
24、
25、步骤d-3,求得表示机器人的中心点与信标分别在罐底投影点的间距f:
26、f=(i+j)sinα
27、步骤d-4,根据机器人中心点距离罐底垂直距离h’满足:
28、
29、求得机器人中心点距离罐底垂直距离h’:
30、h'=h-(i+j)cosα
31、步骤d-5,机器人定位补偿后端坐标:
32、x1=x-fsinβ,y1=y-fsinβ
33、步骤d-1~d-5中:h表示信标距离罐底的垂直高度,α表示因罐底油泥造成的机器人的仰角或俯角,i表示信标抬升高度,j表示机器人顶部至中心点距离,f表示机器人的中心点与信标分别在罐底投影点的间距,h’表示机器人中心点距离罐底垂直距离。
34、优选的,机械臂包括第一机械臂和第二机械臂,第一机械臂与机器人相连,第二机械臂一端连接第一机械臂,另一端连接所述探头。
35、优选的,步骤f,包括如下步骤:
36、步骤f-1,根据机器人坐标以及机械臂的角度,预测探头下一时刻的到达位置:
37、xd2=x1-(xv+kd')sinβ
38、yd2=y1+(yv+kd')cosβ
39、hd=u
40、其中:xd2为期望下一时刻检测探头的平面横坐标,yd2为期望下一时刻检测探头的平面纵坐标;xv为机器人运行所带来的的定位误差,xv=vδt,v为机器人运行速度;k探头运动限制系数,k≤1;hd为期望的探头高度;
41、步骤f-2,换算机械臂运动角度:
42、
43、其中:l1表示第一机械臂的长度,l2表示第二机械臂的长度,l3表示第一机械臂与第二机械臂两端之间的直线长度,α表示因罐底油泥造成的机器人的仰角或俯角;
44、步骤f-3,控制机械臂驱动力τ。
45、与现有技术相比,本发明所具有的有益效果是:
46、1、在本油泥沉积罐底检测机器人自适应控制定位方法中,实现了信标的高度自适应调节,克服了罐底油泥导致机器人上下起伏对定位精度造成的影响,从而进一步对探头进行控制和定位,保证了探头始终处于所要求的工作状态。
47、2、在本油泥沉积罐底检测机器人自适应控制定位方法中,能够自适应储油罐结构,针对不同直径和高度的多种类型的储罐均可以采用本专利采用的定位方式,能够结合超声传感器阵列的排列安装方式,对油下机器人实现精准定位;
48、3、在本油泥沉积罐底检测机器人自适应控制定位方法中,设计了基于pid控制的信标升降架高度自适应调节装置,实现了信标与传感器基阵的同平面要求,并能很好地适应罐底油泥对机器人造成的上下起伏影响;
- 还没有人留言评论。精彩留言会获得点赞!