一种基于机器视觉的工业机器人控制系统
本发明涉及工业机器人,更具体的说是涉及一种基于机器视觉的工业机器人控制系统。
背景技术:
1、工业机器人是一种应用范围广、技术附加值高的数字控制装备,在生产制造业中发挥着重要的作用,比如汽车制造,电器制造上等。搬运机器人是实现代替人工搬运的自动化产品,是可以进行自动化搬运作业的工业机器人。在机器人逐渐代替人工的今日,搬运机器人的出现大大解放了劳动力,有着光明的前景,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。然而,现有的大部分工业机器人的运作需要预先设定好工作程序,通过预设方案来控制工业机器人的工作方案。而这种控制方式对抓取物体的摆放位置以及角度均有着严格的要求,如果出现偏差就会影响生产,从而降低生产效率,而现有的基于图像识别的机器人控制方法则需要进行大量的运算以获取目标工件的位置和抓取方案。因此,如何提供一种运算量低并且能够灵活调整抓取方案的工业机器人控制系统是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于机器视觉的工业机器人控制系统,通过两个ccd相机分别识别抓取目标工件的位置和放置位置并将其转换为机器人坐标,避免生产过程中工件位置的偏差对工业机器人抓取作业的影响。
2、为了实现上述目的,本发明提供如下技术方案:
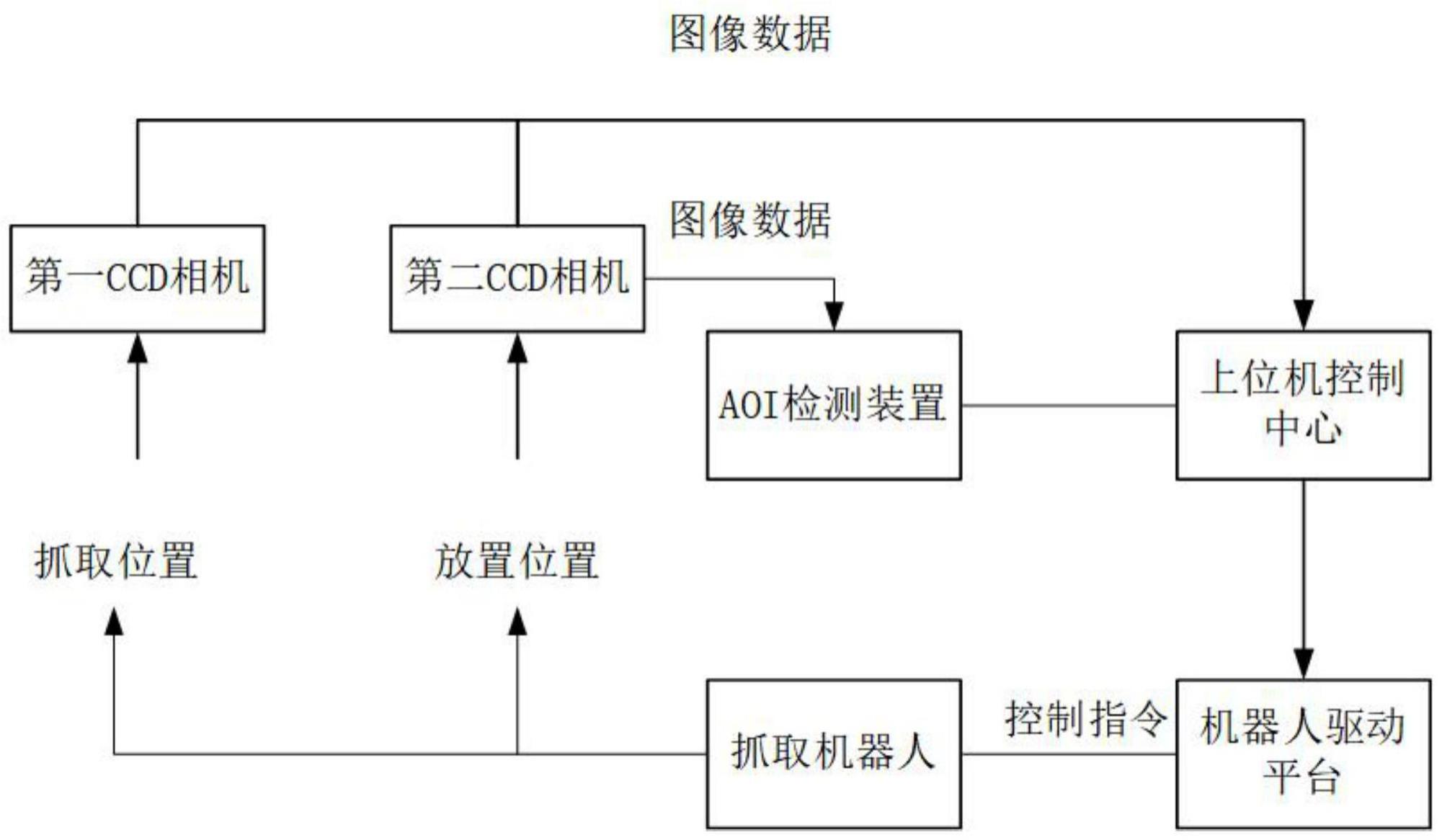
3、一种基于机器视觉的工业机器人控制系统,包括:抓取机器人、机器人驱动平台、上位机控制中心、aoi检测装置、第一ccd相机、第二ccd相机;第一ccd相机,设置在目标工件抓取位置,用于采集抓取位置的图像数据并传输至上位机控制中心;第二ccd相机,设置在目标工件放置位置,用于采集放置位置的图像数据并传输至上位机控制中心;aoi检测装置,设置在目标工件放置位置,用于对放置好的目标工件进行缺陷检测;上位机控制中心,基于抓取位置的图像数据识别抓取前目标工件的坐标,基于放置位置的图像数据识别放置后目标工件的坐标,根据目标工件的坐标、放置位置的坐标计算工业机器人的抓取驱动指令和放置驱动指令并传输至机器人驱动平台,基于放置后目标工件的坐标判断放置位置是否正确;机器人驱动平台,基于接收到的抓取驱动指令和放置驱动指令控制抓取机器人进行目标工件的抓取和放置作业。
4、可选的,aoi检测装置包括:预处理单元、缺陷识别单元,语出单元对第二ccd相机采集的图像数据进行标准化处理后输入缺陷识别单元,缺陷识别单元对目标工件中的缺陷进行识别。
5、可选的,上位机控制中心包括:坐标识别单元、坐标转换单元、指令生成单元、放置检测单元;坐标识别单元,基于抓取位置的图像数据和放置位置的图像数据识别抓取前目标工件的图像坐标和放置后目标工件的图像坐标;坐标转换单元,将目标工件的图像坐标转换为机器人坐标;指令生成单元,基于目标工件的坐标、放置位置的坐标计算工业机器人的抓取驱动指令和放置驱动指令;放置检测单元,目标工件放置完成后判断放置位置是否正确。
6、可选的,采集到目标工件的图像后,坐标识别单元计算图像中每一个像素的在图像坐标系中的位置,提取图像中的目标工件轮廓,得到目标工件的图像坐标,坐标转换单元将目标工件的图像坐标转换至机器人坐标。
7、可选的,坐标识别单元采用边缘检测算法识别目标工件的轮廓,具体为:对图像进行滤波处理;计算滤波后图像的梯度和方向;对梯度的幅值进行非最大值抑制得到边缘点;根据边缘点最大阈值和最小阈值进行检测,将检测后的边缘点连接得到目标工件的轮廓。
8、可选的,抓手机器人设置有4个关节点和1个抓手,指令生成单元基于4个关节点以及抓手在机器人坐标系中的坐标和目标工件的坐标计算二者的坐标差值,得到4个关节点以及抓手的调节方案。
9、可选的,当抓取机器人的关节点以及抓手根据调节方案进行移动后,判断目标工件是否在抓取范围内,如果在抓取范围内,控制工业机器人执行抓取指令;当机器人控制模块判断将目标工件搬运至目标坐标点时,控制工业机器人执行放置指令,放置检测单元基于第二ccd相机采集的放置位置的图像数据判断放置位置是否正确。
10、经由上述的技术方案可知,与现有技术相比,本发明公开了一种基于机器视觉的工业机器人控制系统,具有以下有益效果:本发明基于ccd相机识别工件位置,不需要提前预设工业机器人的控制方案,也不需要严格限制目标工件的摆放位置和角度,能够在生产过程中灵活调整工业机器人的抓取动作;设置两个相机识别抓取目标工件的位置和放置位置,通过第一ccd相机计算工业机器人的调节方案,通过第二ccd相机判断是否搬运至目标位置,避免了单一位置相机跟随工业机器人拍摄导致识别过程算法复杂的问题,同时提高了识别的准确率;通过第二ccd相机采集搬运完成后的图像对工件进行aoi检测,能够有效识别出工件缺陷,减少了加工流程,提高了生产效率。
技术特征:
1.一种基于机器视觉的工业机器人控制系统,其特征在于,包括:抓取机器人、机器人驱动平台、上位机控制中心、aoi检测装置、第一ccd相机、第二ccd相机;第一ccd相机,设置在目标工件抓取位置,用于采集抓取位置的图像数据并传输至上位机控制中心;第二ccd相机,设置在目标工件放置位置,用于采集放置位置的图像数据并传输至上位机控制中心;aoi检测装置,设置在目标工件放置位置,用于对放置好的目标工件进行缺陷检测;上位机控制中心,基于抓取位置的图像数据识别抓取前目标工件的坐标,基于放置位置的图像数据识别放置后目标工件的坐标,根据目标工件的坐标、放置位置的坐标计算工业机器人的抓取驱动指令和放置驱动指令并传输至机器人驱动平台,基于放置后目标工件的坐标判断放置位置是否正确;机器人驱动平台,基于接收到的抓取驱动指令和放置驱动指令控制抓取机器人进行目标工件的抓取和放置作业。
2.根据权利要求1所述的一种基于机器视觉的工业机器人控制系统,其特征在于,aoi检测装置包括:预处理单元、缺陷识别单元,语出单元对第二ccd相机采集的图像数据进行标准化处理后输入缺陷识别单元,缺陷识别单元对目标工件中的缺陷进行识别。
3.根据权利要求1所述的一种基于机器视觉的工业机器人控制系统,其特征在于,上位机控制中心包括:坐标识别单元、坐标转换单元、指令生成单元、放置检测单元;坐标识别单元,基于抓取位置的图像数据和放置位置的图像数据识别抓取前目标工件的图像坐标和放置后目标工件的图像坐标;坐标转换单元,将目标工件的图像坐标转换为机器人坐标;指令生成单元,基于目标工件的坐标、放置位置的坐标计算工业机器人的抓取驱动指令和放置驱动指令;放置检测单元,目标工件放置完成后判断放置位置是否正确。
4.根据权利要求3所述的一种基于机器视觉的工业机器人控制系统,其特征在于,采集到目标工件的图像后,坐标识别单元计算图像中每一个像素的在图像坐标系中的位置,提取图像中的目标工件轮廓,得到目标工件的图像坐标,坐标转换单元将目标工件的图像坐标转换至机器人坐标。
5.根据权利要求4所述的一种基于机器视觉的工业机器人控制系统,其特征在于,坐标识别单元采用边缘检测算法识别目标工件的轮廓,具体为:对图像进行滤波处理;计算滤波后图像的梯度和方向;对梯度的幅值进行非最大值抑制得到边缘点;根据边缘点最大阈值和最小阈值进行检测,将检测后的边缘点连接得到目标工件的轮廓。
6.根据权利要求4所述的一种基于机器视觉的工业机器人控制系统,其特征在于,抓手机器人设置有4个关节点和1个抓手,指令生成单元基于4个关节点以及抓手在机器人坐标系中的坐标和目标工件的坐标计算二者的坐标差值,得到4个关节点以及抓手的调节方案。
7.根据权利要求6所述的一种基于机器视觉的工业机器人控制系统,其特征在于,当抓取机器人的关节点以及抓手根据调节方案进行移动后,判断目标工件是否在抓取范围内,如果在抓取范围内,控制工业机器人执行抓取指令;当机器人控制模块判断将目标工件搬运至目标坐标点时,控制工业机器人执行放置指令,放置检测单元基于第二ccd相机采集的放置位置的图像数据判断放置位置是否正确。
技术总结
本发明公开了一种基于机器视觉的工业机器人控制系统,应用于工业机器人技术领域。包括:抓取机器人、机器人驱动平台、上位机控制中心、AOI检测装置、第一CCD相机、第二CCD相机;第一CCD相机设置在工件抓取位置,第二CCD相机设置在工件放置位置,AOI检测装置设置在工件放置位置,用于对放置好的工件进行缺陷检测,上位机控制中心,用于识别工件的坐标,根据目标工件的坐标、放置位置的坐标计算工业机器人的抓取驱动指令和放置驱动指令;机器人驱动平台控制抓取机器人进行工件的抓取和放置作业。本发明通过双CCD相机识别工件的放置和抓取位置,避免了在生产过程中工件位置的偏差对工业机器人抓取作业的影响,提高了生产效率。
技术研发人员:廖高华,赵莹,洪之敏,曾昊宇,赖贵斌
受保护的技术使用者:南昌工程学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!