基于神经网络的引信与传爆管双机器人装配柔性控制方法
本发明属于力控制和机器人协作控制,具体涉及一种基于神经网络的引信与传爆管双机器人装配柔性控制方法。
背景技术:
1、传统的采用双机器人协作装配的两物件对接拧紧方法,由于无法准确满足约束力的限制,再加上外界环境与接触时的外力干扰,导致工件装配的效果并不理想,会产生诸多不安全因素。因此对两个零件装配进行改良的柔顺控制成了现在双机器人协作装配领域研究的重点。
2、为解决以上问题,常用的方法有通过力/位置混合控制方法、阻抗控制方法配合六维力传感器对力进行检测与控制。阻抗控制相对于力/位置混合控制方法控制效果更好、实现难度也较低,所以一般机器人协作工程中使用阻抗控制更为常见。
3、然而传统的阻抗控制在实际应用中由于环境的干扰因素,难以准确获得机器人末端执行器的参考轨迹,对时变的干扰无法解决。如今的双机器人加工环境更为复杂、特殊,机器人怎样能够自适应环境的扰动并克服扰动的干扰对物件进行柔性装配成了现在工业生产的一大难题。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明提供一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,能够克服外界环境及不确定力场的干扰,使得阻抗控制更加精准,提高双机器人工作效率,最终实现引信与传爆管的柔性装配。
2、本发明的目的是通过以下技术方案实现的:
3、一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,包括以下步骤:
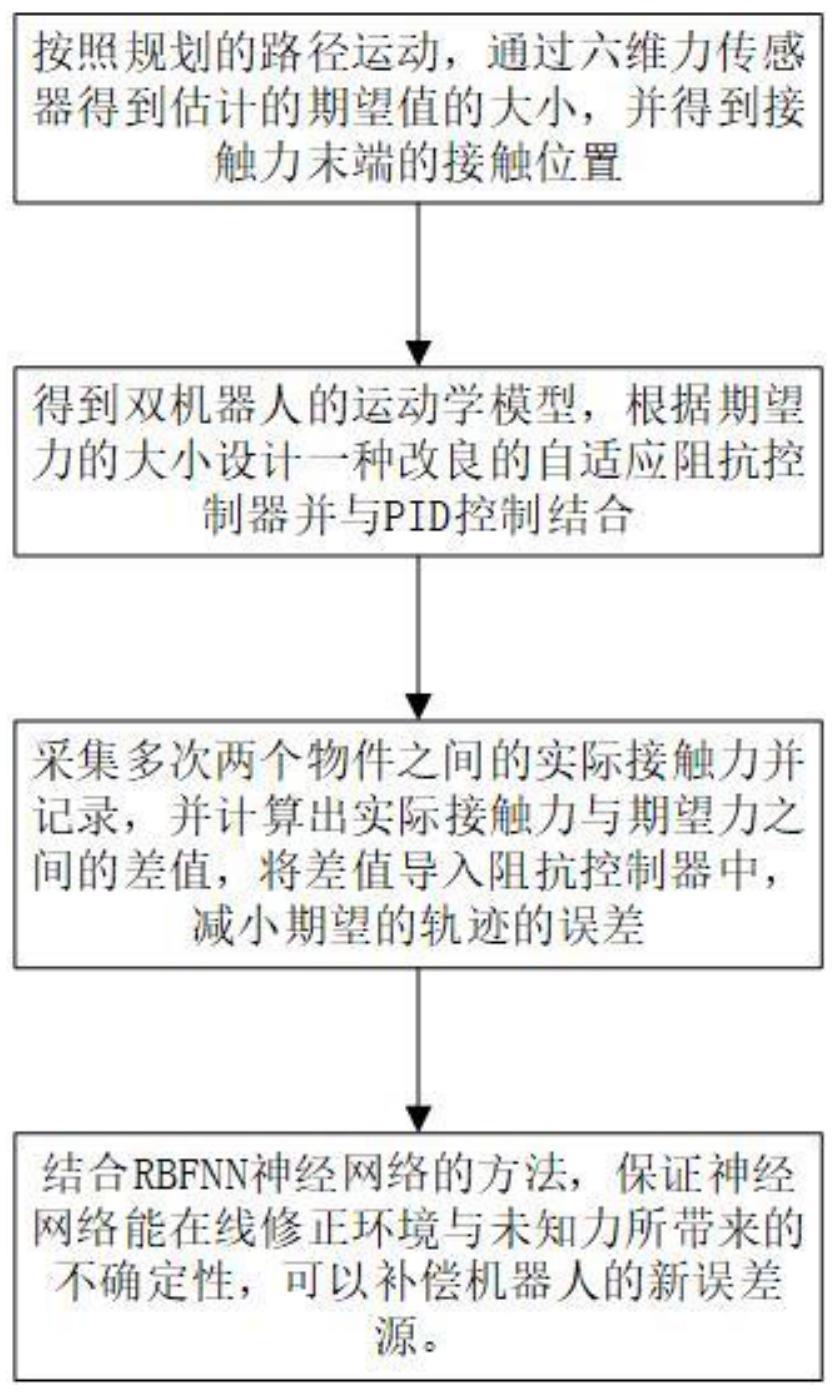
4、s1:待双机器人将引信与传爆管通过所规划的路径夹持到达预期的位置后,首先通过实验在力传感器上获得估计的期望接触力,并且根据双机器人的轨迹规划后的接触位置得出机械臂末端位置的位置估计值;
5、s2:得到双机器人的运动学模型,根据期望接触力设计自适应阻抗控制器,将阻抗控制关系与pid控制策略结合,使机器人与机器人之间的实际作用力跟踪该期望接触力,将实际接触力转换为实际位置的控制;
6、s3:采集每一次双机器人协作装配所产生的两工件之间的实际接触力,计算出实际接触力的平均值与期望接触力之间的差值,将差值导入所述自适应阻抗控制器中,减小期望轨迹的误差;
7、s4:运用神经网络拟合真实姿态、真实驱动量和理论驱动量差值的关系,经过训练的神经网络在线修正轨迹。
8、本发明的有益效果在于:
9、本发明提供一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,结合实际的运动轨迹和环境的影响,可以克服这些不确定因素与干扰,使得双机器人协作配合两物体的拧紧力大小合适;结合了动力学模型与rbfnn神经网络的方法,搭建了阻抗控制器,通过此方法可以对非线性模型产生一个很好的拟合效果,满足机械臂同时工作于自由空间和接触空间,且能够同时满足对恒定力和时变力的跟踪。当双机械臂在接触对接的时候可以对末端的接触力进行跟踪,在对接前的自由空间内,可以同时对位置和速度进行跟踪,改进的阻抗关系,通过所选的pid控制,有效的减小了力的超调,提高了响应速度,本发明可以应用于含有不确定因素以及轻微干扰环境下位置与力的控制。
技术特征:
1.一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s2中所述自适应阻抗控制器由以下步骤建立:
3.如权利要求2所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s22包括:
4.如权利要求3所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s23构建的笛卡尔坐标系下对应的机械臂动力学模型为
5.如权利要求4所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s24设计的阻抗控制器表达式为:
6.如权利要求5所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s25得到的自适应阻抗控制器表达式为:
7.如权利要求6所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s3包括:
8.如权利要求7所述的一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,其特征在于,所述步骤s4包括:
技术总结
本发明公开了一种基于神经网络的引信与传爆管双机器人装配柔性控制方法,包括以下步骤:首先通过实验在力传感器上获得估计的期望接触力,并且根据轨迹规划后的接触位置得出机械臂末端位置的估计值;得到双机器人的运动学模型,根据期望接触力设计自适应阻抗控制器,将阻抗控制关系与PID控制策略结合;采集每一次双机器人协作装配所产生的两工件之间的实际接触力,计算出实际接触力的平均值与期望接触力之间的差值,将差值导入所述自适应阻抗控制器中;运用神经网络拟合真实姿态、真实驱动量和理论驱动量差值的关系,经过训练的神经网络在线修正轨迹。本发明能够克服外界环境及不确定力场的干扰,使得阻抗控制更加精准。
技术研发人员:马国庆,曹国华,赵嘉宝,贾冰,唐晨
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!