一种基于视觉多点位姿约束的机器人运动学参数校准方法
本发明涉及机器人领域,尤其涉及一种基于视觉多点位姿约束的机器人运动学参数校准方法。
背景技术:
1、在当前的生产制造过程中,传统的机器人不仅需要基于示教再现模式进行简单重复的运动,还需要离线编程进行复杂的轨迹动作,以实现小批量、多品种的柔性生产和多机器人协同工作。这些任务对于重复定位精度高、但绝对定位精度较差的工业机器人来说难度较大。机器人在制造和装配过程中的零件误差、连续高负载条件下的形变、碰撞、长时间使用中的磨损老化和关节替换维修等都会导致实际运动学参数与标称参数之间的偏差,造成机器人末端执行器的绝对定位误差。工业应用中一般借助6r机器人末端6自由度特征使用绕点精度粗略检测机器人的绝对定位精度。
2、在影响机器人绝对定位精度的因素中,运动学参数的偏差引起的精度误差约占总误差的80%。因此,在机器人重复定位精度足够的情况下,运动学的校准是提高机器人绝对定位精度的最便宜且有效方法。许多学者进行了不同的研究,提出了多种校准方法。机器人的校准方法可分为开环校准和闭环校准。
3、开环校准基于世界坐标系统,测量机器人末端执行器的实际位置。用于绝对校准的常用测量设备包括激光跟踪器、球杆仪和三坐标测量机等。精密测量设备可提供高精度测量结果,但设备价格昂贵且需要熟练的操作人员。t.sun、filion等人分别提出了基于高精度外部测量设备的机器人开环校准方法,可以较高精度测量机器人末端位姿,实现机器人关节参数辨识并获得较好的校准结果,但相关设备体积庞大价格昂贵。
4、闭环校准测量端执行器的相对姿态/位置,设置一定的约束条件,如平面、距离、单点和球约束,不需要测量实际位置。闭环校准中的参数识别过程比较困难,但使用的测量设备价格较低。大多数闭环校准方法的主要缺点是需要大尺寸标定物、耗时或精度低。
5、joubair借助安装在机器人末端的接触式探头和固定的高精度平板建立平面约束,实现了6r机器人的运动学校准。但是需要借助较大尺寸的高精度加工标准物体,且由于需要接触式测量,测量过程繁琐复杂耗时较长。wang基于机器视觉方法借助标准球建立了机器人末端的点和距离约束,实现了6r机器人闭环运动学校准方法,但是该方法为实现0.02mm的测量精度,需要较高像素的视觉传感器且测量范围较小。
6、目前,闭环校准方法并未广泛使用。多家机器人制造商或其他机构提供一次性开环校准服务。然而,这仅适用于拥有一台或几台机器人的客户,并且在复杂的工厂环境中部署测量设备既困难又耗时。具有成本效益的闭环校准方法具有很大的推广潜力。
7、相机是常用的闭环校准测量设备,chen h使用pnp算法实现了高精度的单目位姿测量,lee使用神经网络基于单目位姿测量实现了机器人手眼关系的在线校准,sarabandi使用手眼校准算法实现了机器人手眼关系的参数校准,但是手眼校准中不考虑机器人运动学误差,运动学误差会影响手眼校准精度。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种基于视觉多点位姿约束的机器人运动学参数校准方法,可以实现对关节零位误差、连杆长度误差、手眼转换关系的辨识及补偿,过程中不需要测量标定板实际位置。
2、根据本发明的第一方面,提供了一种基于视觉多点位姿约束的机器人运动学参数校准方法,包括:
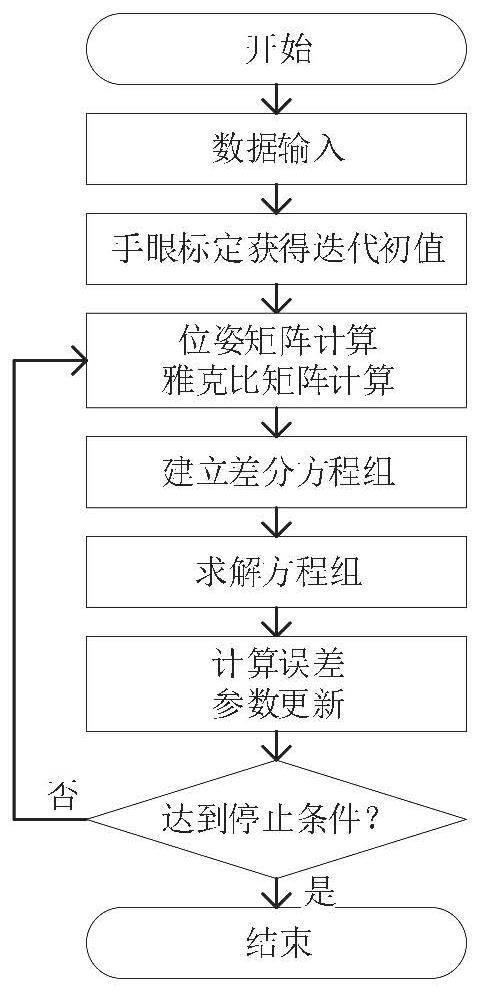
3、步骤1,控制末端安装有相机的待校准机器人围绕标定板中心运动,采集运动过程中多位姿状态下机器人模型数据和所述标定板的标称位姿数据;
4、步骤2,使用手眼校准算法获得初始手眼转换矩阵作为迭代初值;
5、步骤3,由所述标定板上多个标定点的差分位姿约束方程组的组合构造生成多点位姿约束方程组;单个标定点的差分位姿约束方程组为该标定点的标称位姿与实际位姿的偏差与机器人运动学参数偏差的关系;
6、步骤4,使用加权最小二乘方法迭代求解所述多点位姿约束方程组,以达到迭代停止关系时得到的所述机器人运动学参数偏差对待校准机器人的运动学参数进行校准。
7、在上述技术方案的基础上,本发明还可以作出如下改进。
8、可选的,所述步骤1中采集的机器人模型数据包括机器人参数和关节角度;
9、所述标定板的标称位姿数据基于机器人的视觉位姿测量结果得到。
10、可选的,单个标定点的差分位姿约束方程组的获取过程包括:
11、步骤301,计算标称位姿与实际位姿的偏差为误差模型公式:δp=pab-pnb=f(w+δw)-f(w);
12、其中,δp表示偏差;pab表示实际位姿,ipab=f(w+δw)表示标定板第i点实际位姿;pnb表示标称位姿,ipnb=f(w)表示标定板第i点标称位姿;下标n表示n种位姿,w和δw分别为机器人模型的可辨识参数及其变化量;
13、步骤302,将所述误差模型公式通过一阶泰勒展开式进行简化后简写成:δp=jδw;j为位姿雅克比矩阵;
14、步骤303,建立单点差分位姿约束方程组为:简写为ihδw=io;
15、步骤304,由各个所述单点差分位姿约束方程组的组合构造生成多点位姿约束方程组表示为为
16、简写为kδw=b。
17、可选的,所述机器人模型为dh参数模型;
18、所述机器人模型的可辨识参数:
19、w=[θ2,θ3,θ4,θ5,a2,a3,d3,re0,re1,re2,re3,te0,te1,te2];
20、其中,θ2、θ3、θ4和θ5为可修正关节零位参数,a2、a3、d3为机器人可修正连杆长度参数,[re0,re1,re2,re3]和[te0,te1,te2]为手眼关系参数。
21、可选的,标定板上标定点的标称位姿其中,和由所述机器人模型中相邻关节连杆的转换矩阵获取;其中,i=1、2、3、4、5或6,所述机器人为6自由度的串联连杆机器人时,base=0,end=6;s表示正弦函数;c表示余弦函数;
22、为相机坐标系到机器人末端坐标系的转换矩阵,为标定板坐标系到相机坐标系的转换矩阵。
23、可选的,所述步骤302中将所述误差模型公式通过一阶泰勒展开式进行简化为:
24、
25、可选的,所述步骤303中建立单点差分位姿约束方程组的过程为:
26、基于机器人在不同位姿下通过视觉位姿测量获得标定板的标称位姿数据,建立单点的位姿约束方程组:
27、简写为ihδw=io;
28、通过差分方法消除所述位姿约束方程组中第i点的实际位姿ipab,得到所述单点差分位姿约束方程组。
29、由各个单点差分位姿约束方程组的组合构造生成多点位姿约束方程组表示为简写为kδw=b。
30、可选的,所述步骤4中使用加权最小二乘方法求解所述多点位姿约束方程组kδw=b等价于求解(ktk+λi)δw=ktb方程;其中,λ是权重,权重λ通过btb的变化趋势进行变步长优化。
31、可选的,所述步骤4中停止迭代条件包括:满足最大迭代次数或末端绕点误差;
32、所述末端绕点误差的计算过程包括:对n个校准点分别多姿态测量mn次,每个位姿相对该点平均位置误差的均值作为末端绕点误差。
33、本发明提供的一种基于视觉多点位姿约束的机器人运动学参数校准方法,首先,可以直接利用常见的机器人手眼系统中的相机,成本较低,配合低成本标定板完成运动学校准,设备安装精度要求低,便于安装、拆卸和携带,校准过程中不需要测量标定板实际位置。其次,高精度的标定板靶标为高精度测量提供了基础,标定板靶标亚像素特征提取算法和单目视觉位姿方法进一步提高了系统测量精度和稳定性。然后,系统校准过程在机器人工位上进行,无需拆卸或运输机器人,校准所需工作空间没有特殊要求,同时由于校准工具成本低且安装方便,可以实现长期在位精度监测。
- 还没有人留言评论。精彩留言会获得点赞!