一种抓取稳定的工业机器人的制作方法
本发明涉及工业机器人,具体为一种抓取稳定的工业机器人。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中;此外,工业机器人可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
2、目前,各个领域中的工厂在搬运物料时会使用工业机器人代替人工,从而提升生产效率,同时也可以有效避免人工负伤的情况,现有技术中的工业机器人在搬运堆垛物料时,采用的是多自由度的机械手臂完成,该机械手臂末端安装有夹板对物料进行夹紧,从而实现对物料的搬运堆垛。
3、但是,由于物料大多数是被打包在瓦楞纸箱中的,而瓦楞纸箱在使用过程中,其外壁会受到工程环境的污染导致外壁粘附许多浮灰,大量灰尘的存在导致夹板对于包装箱外壁的夹持摩擦力降低,从而使得物料的抓取不稳定,容易出现物料的滑脱,为此,工程师们在夹板的底壁添加了横向延伸的底板,利用底板对包装箱的支撑效果来辅助抓取,从而提升抓取的稳定性,该方案虽然解决了包装箱易滑脱的问题,但是包装箱重力的会影响到底板的插入,也就是说,当包装箱较重时,底板是难以插进去的,若强行插入至包装向底端则会导致包装箱出现破损,甚至挤压到物料对物料造成破坏,因此,我们提出一种抓取稳定的工业机器人。
技术实现思路
1、基于此,本发明的目的是提供一种抓取稳定的工业机器人,以解决上述背景中提到的技术问题。
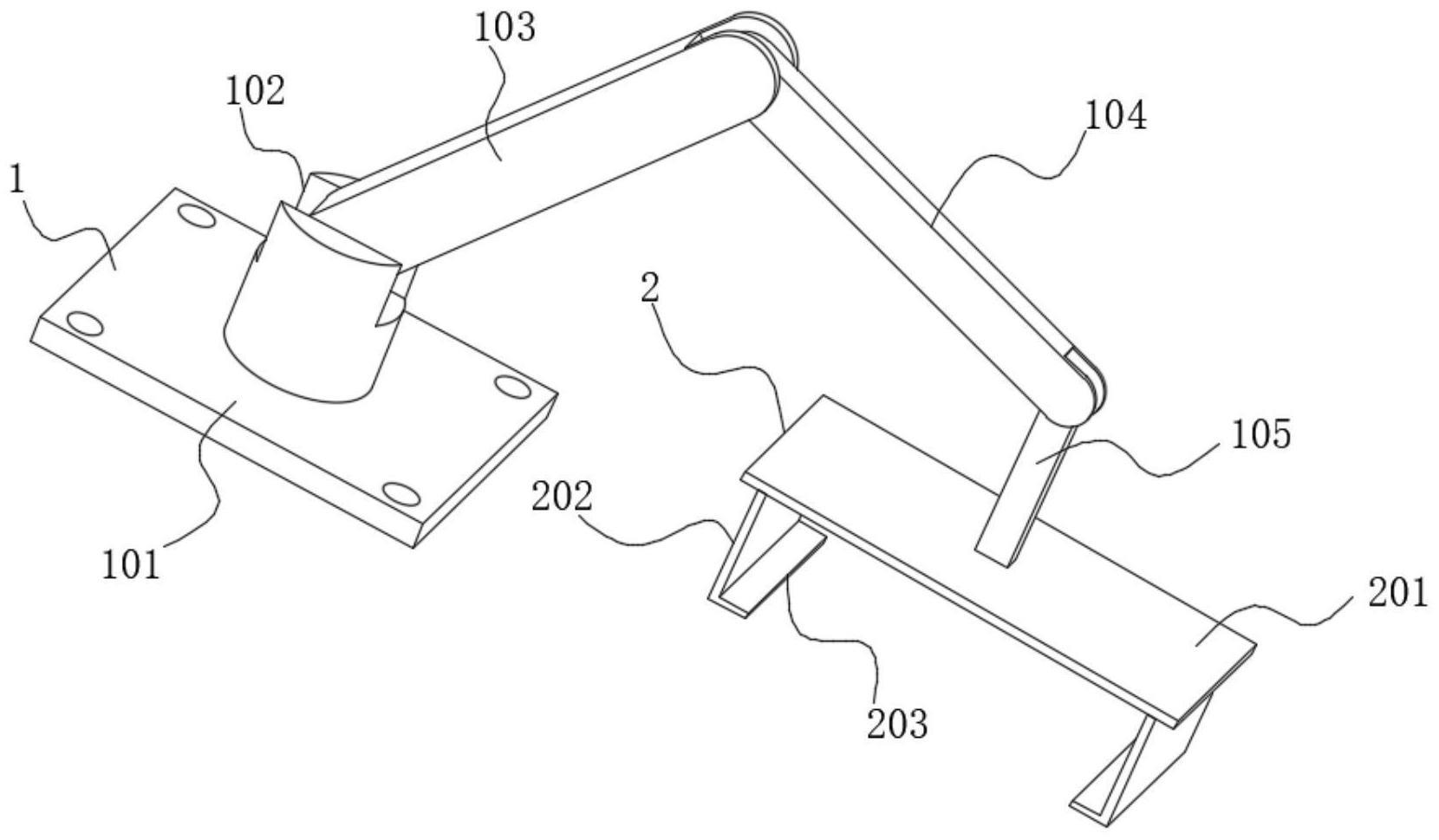
2、为实现上述目的,本发明提供如下技术方案:一种抓取稳定的工业机器人,包括工业机器人组件以及作业台,所述工业机器人组件包括有与固定物固定连接的底板,且底板的端面安装有基座,所述基座的顶端安装有第一活动臂,且第一活动臂的末端安装有第二活动臂,所述第二活动臂的末端安装有第三活动臂,所述第三活动臂的末端则设置有抓取部件,且抓取部件的顶端位于第三活动臂的外侧安装有气动组件,所述气动组件的下方位于工作台的两端外壁均设置有对包装箱进行辅助抓取的翘板组件。
3、通过采用上述技术方案,使得工业机器人对于包装箱的抓取更加稳定,并且支撑板的插入也更加容易,不会出现难以插入或者损坏物件的情况,实现了辅助抓取包装箱的作用。
4、本发明进一步设置为,所述抓取部件包括有与第三活动臂底壁固定连接的顶板,且顶板的底端对称设置有两组夹板,所述夹板的内侧端面且位于夹板的底部安装有与夹板内侧端面滑动连接的支撑板,所述支撑板的内部开设有空腔,且支撑板的端面开设有多组与所述空腔连通的排气口。
5、通过采用上述技术方案,实现对包装箱的抓取效果。
6、本发明进一步设置为,所述气动组件包括有安装在顶板顶端的气箱,且气箱的内部安装有气泵系统,所述气箱的两端外壁均安装有所述气泵系统连接的气管,且气管的内壁中滑动连接有第一活塞板,所述第一活塞板的上方设置有气腔,且第一活塞板的底端固定连接有向下延伸且内部中空设置的插杆,所述插杆的内部设置有与插杆内壁限位滑动连接的竖杆,且竖杆的顶端固定连接有顶杆,所述第一活塞板的内侧对称安装有两组密闭板,两组所述密闭板均通过装置与第一活塞板转动连接,所述顶杆的顶端与密闭板的底壁贴合设置。
7、通过采用上述技术方案,实现对翘板组件以及限位组件的气动驱动效果。
8、本发明进一步设置为,所述翘板组件包括有设置在工作台两端的翘板,且翘板与所述工作台内壁通过扭簧轴连接,所述翘板的端面两侧均安装有转动座,一组所述位于工作台外侧的转动座的顶端设置有插口,且插口与所述竖杆处于同一竖直方向上,另一组所述转动座的顶端则通过转动座连接有内部开设空腔的顶升板,所述顶升板的顶端端面与所述工作台的端面齐平设置,且顶升板的端面开设有多组与其内部空腔连通的吹气口,所述插口的开口内径与竖杆的外径适配,且插口的内部设置有向上凸起的挤压环,所述挤压环的内径小于竖杆的外径,以实现对所述竖杆的顶升,所述挤压环的内侧则开设有贯穿插口并延伸至转动座内部的通气孔,且通气孔的末端端部通过单向阀连接有连接管,所述连接管的端部则与顶升板内部的空腔连通。
9、通过采用上述技术方案,起到对包装箱的翘起效果,从而有助于支撑板插入至包装箱底部,辅助抓取作业的进行。
10、本发明进一步设置为,所述气管的外壁上设置有限位组件,且限位组件包括有开设在气管底部内壁中的单向阀,而所述单向阀的端部则连接有延伸至顶板内部的气动管,所述顶板的内部开设有驱动腔,且驱动腔的内壁中滑动连接有第二活塞板,所述第二活塞板的端部固定有延伸至夹板外壁的推杆,且推杆与驱动腔内壁连接处动密封连接,所述夹板的顶端位于顶板的内壁开设有滑槽,且滑槽的内部滑动连接有与夹板顶端固定连接的滑块,所述滑块的外壁连接有安装在滑槽内壁上的复位弹簧。
11、通过采用上述技术方案,起到对包装箱的夹紧限位效果。
12、本发明进一步设置为,所述夹板的外壁上还设置有二次清理组件,且所述二次清理组件包括有从夹板内部延伸至外侧的从动块,所述夹板的内部开设有收纳腔,且收纳腔的内壁上安装有末端延伸至支撑板中且两端均密封的l型软管,而所述l型软管的顶端则开设有与排气口连通的压力阀,所述l型软管的内部设置有与l型软管内壁滑动连接的第三活塞板,且第三活塞板的顶端连接有伸缩杆,所述伸缩杆的输出端部外壁设置有齿壁,所述夹板的内壁中还开设有用于朝l型软管内部进气的进气阀所述从动块的底壁设置有第一从动齿壁第一从动齿壁,且第一从动齿壁第一从动齿壁的下方位于夹板的内壁中啮合连接有从动齿轮,所述从动齿轮的一侧下方传动连接有第一驱动齿轮,且第一驱动齿轮与伸缩杆输出端部外壁的齿壁啮合连接,所述从动齿轮的下方位于夹板的内壁中安装有与从动齿轮传动连接的第二驱动齿轮,且第二驱动齿轮的一侧位于支撑板的外壁开设有与第二驱动齿轮啮合连接的第二从动齿壁。
13、通过采用上述技术方案,起到对包装箱底部的二次吹气除尘,保证了支撑板与包装箱接触位置处的摩擦力,从而进一步的提升抓取稳定性。
14、综上所述,本发明主要具有以下有益效果:
15、1、本发明通过设置抓取部件、气动组件、翘板组件和限位组件,首先,待抓取的包装箱会处于作业台上等待抓取,此时作业机器人会在控制系统的作用下,通过第一活动臂、第二活动臂以及第三活动臂之间的配合,使得夹板会移动至包装箱两侧,此时启动气泵系统,气泵系统会通过气管输出气体,此时气管中的气体会挤压第一活塞板,使得第一活塞板向下移动并推动插杆向下移动至插口中,随着插杆的继续移动,插杆会挤压翘板的一端,此时翘板会在扭簧轴的作用下发生转动,因此翘板的另一端则会向上撬动,此时顶升板会在翘板的作用下向上移动,实现对包装箱的顶升效果,此时包装箱底部与作业台之间则会预留间隙,进而有助于支撑板的插入,起到辅助抓取的效果,与此同时,在第一活塞板的移动至最大位置处时,其顶端的高度恰好低于气动管与气管的连接处,因此气管中的部分气体会通过气动管流出至驱动腔中挤压第二活塞板,第二活塞板因而会通过推杆实现对夹板的驱动,夹板因而在滑槽和滑块的辅助作用下移动至与包装箱外壁紧密贴合,实现对包装箱的夹取限位作用,此外,支撑板也会跟随夹板一同移动,此时支撑板会插入包装箱底部与作业台的间隙中,从而再抓取过程中起到对包装箱的竖向支撑作用,提升了工业机器人抓取的稳定性,有效防止夹板打滑导致的包装箱滑脱;
16、2、本发明通过设置气动组件和二次清理组件,在插杆插入插口中后,插杆内部的竖杆会在挤压环的阻碍作用下向上反向移动,竖杆的反向移动则会通过挤压杆挤压密闭板转动打开,此时气管中的部分气体会通过竖杆通入插口,随后气体会通过插口底部开设的通气孔流出,在经过连接管流入至顶升板内部的空腔中,最后气体会通过出气口吹出,实现对包装箱底部浮灰的吹除,从而使得包装箱在堆垛时,两组包装箱之间的摩擦力会增大,保证了堆垛时的稳定性,进一步的,在夹板移动至与包装箱外壁贴合的过程中,位于夹板内侧端面的从动块会先与包装箱外壁接触,在包装箱外壁的挤压作用下,从动块会移动至夹板内部,在从动块移动过程中,其底部的第一从动齿壁会驱使从动齿轮转动,从动齿轮转动后会通过传动作用驱使第一驱动齿轮转动,第一驱动齿轮转动后会带动伸缩杆的输出端部向下移动,此时第三活塞板则会在伸缩杆的推动作用下向下移动挤压下部空气,因此下部的空气在受到挤压后会通过支撑板端部的排气口排出,气体排出后会对支撑板上方的包装箱底壁进行二次除尘,从而保证支撑板与包装箱底壁贴合后的摩擦力即进一步提高抓取的稳定性,此外,从动齿轮还会通过传动作用带动第二驱动齿轮转动,第二驱动齿轮转动后会通过第二从动齿壁的作用驱使支撑板向上靠近包装箱底部移动,当从动块全部移动至夹板中时,支撑板也恰好移动至与包装箱底壁接触,实现对包装箱底部的支撑效果。
- 还没有人留言评论。精彩留言会获得点赞!