一种多冗余度机械臂系统的一致性规划方法及电子设备
本技术涉及机械臂控制领域,尤其是一种多冗余度机械臂系统的一致性规划方法及电子设备。
背景技术:
1、随着人工智能和计算机技术的不断发展,机器人系统的应用领域和范围正在不断扩大,机械臂系统渗入到我们的工作和生活中。机械臂系统在居家生活、工业制造、电力行业以及国防等领域中都扮演着重要角色。尤其在工业制造流水线中,机械臂得到了大量的应用,例如汽车流水生产线中的焊接机械臂、搬运机械臂、喷漆机械臂等。随着工业流水线的扩大和智能化,机械臂被大规模的应用。机械臂系统也由原来的单机械臂系统扩展为多机械臂系统,同时,工业流水线上的工作任务具有可重复性。多机械臂系统可广泛应用于多种产品大规模制造的任务,极大地提高生产效率,降低生产成本,增强可靠性。因此,针对在可重复性环境下的多机械臂系统的研究成为了今年来的研究热点。
2、多冗余度机械臂系统包含一个领导者机械臂,其余为跟随者机械臂,在这些实际的工作任务中,需要多机械臂系统的各个机械臂进行信息交互。然而,由于节约成本和实际工作环境约束,并不是所有的跟随者机械臂都可以获得领导者机械臂的信息,只有部分在领导者机械臂附近的跟随者机械臂可以获得领导者机械臂的控制命令,而剩余其他跟随者机械臂仅能通过其邻近的跟随者机械臂获得信息,以实现跟踪领导者机械臂的运动轨迹。同时,为保证多机械臂在执行任务的可重复性,也即重复运动要求机械臂的各个关节在完成一次末端轨迹闭合的周期运动之后都能回复到其初始状态,在这种情况下能保证机械臂每次周期运动的初始状态都是一致的。对于领导者机械臂需要采用逆运动学方程和重复运动指标获得实现跟踪期望轨迹的最优关节角度,跟随者机械臂通过通信网络学习得到领导者机械臂的最优关节角度。
3、传统的冗余度机械臂的运动学求解方法是基于伪逆的方法。然而,由于伪逆方法需要计算矩阵的逆,并且冗余度机械臂在实际应用中面临的任务越来越多样化,所以在实际应用中难以实时处理较为复杂的任务。相较于伪逆方法,基于二次规划的优化方案的机械臂的运动规的方法应用更为广泛。相关技术提出了一种递归神经网络求解器,称作零化神经网络,该求解器被用来求解时变的二次规划问题,并用于求解冗余度机械臂运动规划问题。由于利用了参数的导数信息,零化神经网络能够成功求得时变二次规划问题的最优解。然而,这种传统的零化神经网络只能在无限时间内逼近理论最优解,且该方法无法实现在有限工作时间内的多机械臂系统的一致性控制。为实现可重复性的多机械臂系统的一致性规划,迭代学习控制,作为一种常用于重复运动机器人系统的控制方案,应用到多机械臂系统的一致性二次规划问题的求解中。并且,在基于迭代学习的多冗余度机械臂系统的一致性规划还没有相关的文献进行研究。迭代学习网络的输入考虑了各个跟随者机械臂的一致性误差,在不断重复同一期望轨迹的跟踪任务中,不仅可以实现领导者机械臂跟踪期望轨迹的任务,还可以实现跟随者机械臂在有限时间内跟踪上领导者机械臂的轨迹。
技术实现思路
1、有鉴于此,本技术提供一种多冗余度机械臂系统的一致性规划方法及电子设备,以实现领导者机械臂跟踪期望轨迹的任务,且实现跟随者机械臂在有限时间内跟踪上领导者机械臂的轨迹。
2、本技术的一方面提供了一种多冗余度机械臂系统的一致性规划方法,包括:
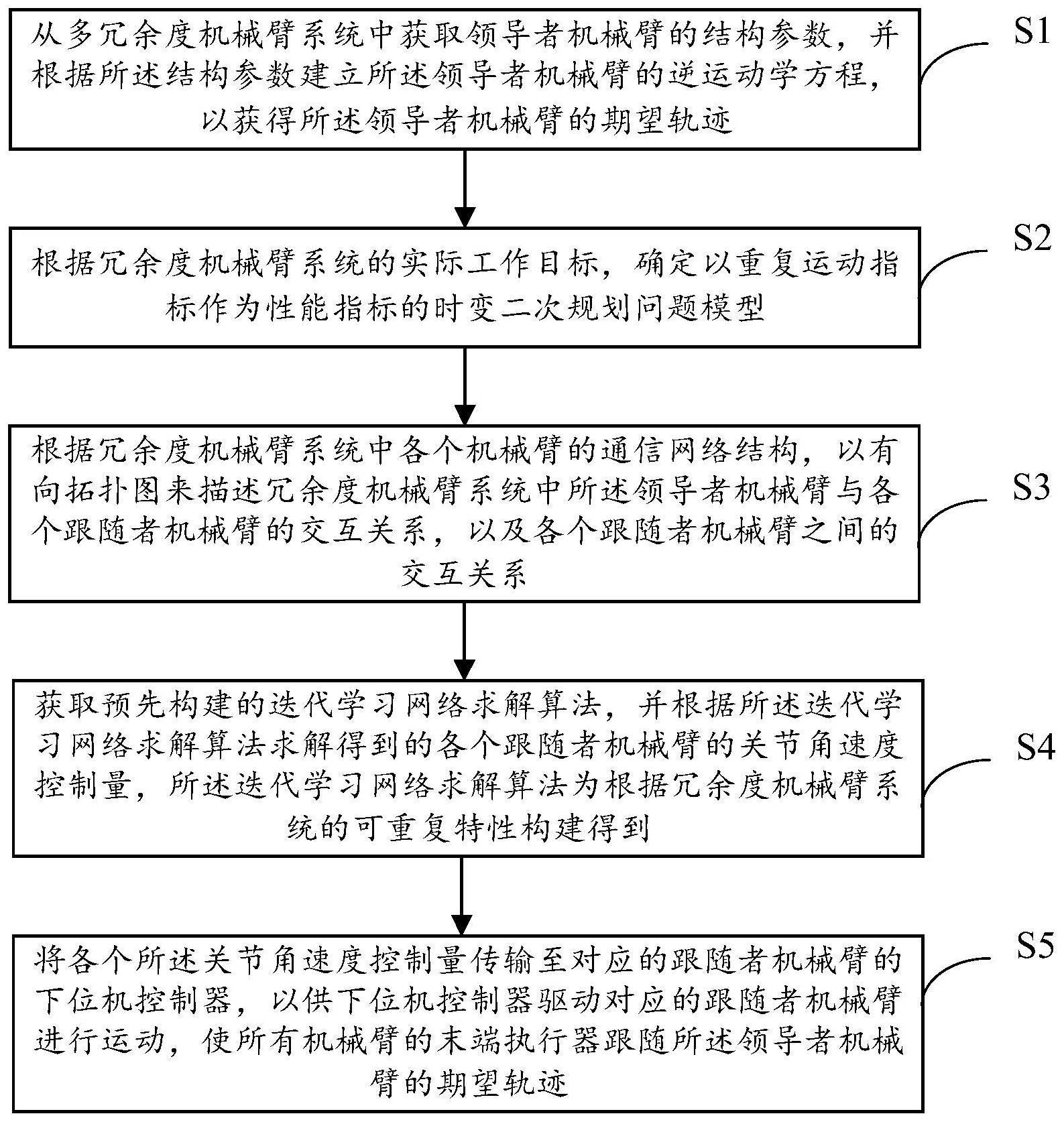
3、s1:从多冗余度机械臂系统中获取领导者机械臂的结构参数,并根据所述结构参数建立所述领导者机械臂的逆运动学方程,以获得所述领导者机械臂的期望轨迹;
4、s2:根据冗余度机械臂系统的实际工作目标,确定以重复运动指标作为性能指标的时变二次规划问题模型;
5、s3:根据冗余度机械臂系统中各个机械臂的通信网络结构,以有向拓扑图来描述冗余度机械臂系统中所述领导者机械臂与各个跟随者机械臂的交互关系,以及各个跟随者机械臂之间的交互关系;
6、s4:获取预先构建的迭代学习网络求解算法,并根据所述迭代学习网络求解算法求解得到的各个跟随者机械臂的关节角速度控制量,所述迭代学习网络求解算法为根据冗余度机械臂系统的可重复特性构建得到;
7、s5:将各个所述关节角速度控制量传输至对应的跟随者机械臂的下位机控制器,以供下位机控制器驱动对应的跟随者机械臂进行运动,使所有机械臂的末端执行器跟随所述领导者机械臂的期望轨迹。
8、可选地,步骤s1包括:
9、从多冗余度机械臂系统中获取领导者机械臂的雅克比矩阵和关节角速度变量,作为结构参数;
10、根据所述雅克比矩阵和关节角速度变量建立所述领导者机械臂的逆运动学方程如下:
11、
12、其中,jl(t)∈rm×n表示所述领导者机械臂的雅克比矩阵,x0(t)∈rn表示所述领导者机械臂的关节角速度变量,表示所述领导者机械臂期望轨迹的时间导数。
13、可选地,步骤s2包括:
14、确定以重复运动指标作为性能指标的时变二次规划问题模型,所述时变二次规划问题模型如下:
15、
16、
17、其中,n表示机械臂的总个数,xj(t)∈rn表示第j个机械臂的关节角速度向量,bj(t)∈rn×1表示系数向量,hj(t)∈rn×n表示一个正定对称的系数矩阵。
18、可选地,所述方法还包括:
19、利用惩罚函数法将所述时变二次规划问题模型等价变换为无约束优化问题,所述无约束优化问题如下:
20、
21、其中,σ>>0表示惩罚因子,jl,v(t)∈r1×n表示矩阵jl(t)的第v行,yd,v(t)∈r1表示向量yd(t)的第v行。
22、可选地,步骤s3包括:
23、利用第一有向拓扑图表示包含所述领导者机械臂的冗余度机械臂系统的交互关系;其中,所述第一有向拓扑图表示为节点“0”表示所述领导者机械臂,节点“1”~节点“n”表示各个所述跟随者机械臂;
24、利用第二有向拓扑图表示只有所述跟随者机械臂的冗余度机械臂系统的交互关系;其中,所述第二有向拓扑图表示为g=(v,e),v={1,2,l,n}表示所述跟随者机械臂对应的节点集合,表示无领导者机械臂的拓扑图中的边集合;
25、利用矩阵描述所述跟随者机械臂是否获得所述领导者机械臂的信息关系;其中,所述矩阵表示为s=diag(s1,s2,l,sn),sj=1表示所述跟随者机械臂可以获得所述领导者机械臂的信息,sj=0表示所述跟随者机械臂无法获得所述领导者机械臂的信息。
26、可选地,步骤s4包括:
27、s4.1:先利用变量i∈z+来描述冗余度机械臂系统的任务重复次数,再利用变量t∈[0,t]来描述任务时间;将所有机械臂的关节角速度向量组合为:
28、x(t,i)=(x0(t,i)t,x1(t,i)t,l,xn(t,i)t)t∈rn(n+1)
29、s4.2:对所述领导者机械臂和跟随者机械臂的关节角速度计算偏导数,获得无约束优化目标函数,所述无约束优化目标函数如下:
30、
31、其中,表示无约束优化目标函数对向量x(t,i)的偏导数;
32、s4.3:利用无领导者机械臂的冗余度机械臂系统的有向拓扑图g=(v,e),定义邻接矩阵a=[apj]∈rn×n,其中apj=1表示节点“j”的机械臂从节点“p”获得信息,apj=0表示节点“j”的机械臂无法从节点“p”获得信息;
33、利用邻接矩阵计算得到拉普拉斯矩阵,所述拉普拉斯矩阵为:
34、l=[lpj]∈rn×n
35、其中,
36、对于节点“p”的跟随者机械臂,根据以下表达式计算其一致性跟踪误差:
37、
38、其中,εp(t,i)∈rn表示所述一致性跟踪误差,c(p)表示节点“p”的机械臂所有的邻居机械臂节点集合;
39、s4.4:计算所有的跟随者机械臂跟踪领导者机械臂的期望轨迹跟踪误差,所述跟踪误差的表达式为:
40、
41、其中,y(t,i)=(y1(t,i)t,y2(t,i)t,l,yn(t,i)t)t∈rmn为所有跟随者机械臂的输出轨迹向量组合,表示克罗内克积;
42、计算所有跟随者机械臂的一致性误差向量组合,所述一致性误差向量组合为:
43、
44、s4.5:获取预先构建的迭代学习网络求解算法,所述迭代学习网络求解算法的表达式为:
45、
46、其中,k表示学习增益矩阵,矩阵j=diag(jl(t),j1(t),l,jn(t))∈rn(n+1)×n(n+1),jj(t)∈rm×n表示对应机械臂的雅克比矩阵;
47、迭代学习的输入的更新律设计为:
48、
49、其中,u(t,i)∈rm(n+1)表示所述迭代学习的输入,γ∈rmn×mn为增益矩阵,其满足其中||·||表示由向量二范数诱导的矩阵二范数。
50、可选地,步骤s5包括:
51、将根据所述迭代学习网络求解算法求解得到的关节角速度作为跟随者机械臂的最优关节角速度,所述最优关节角速度表示为:
52、
53、其中,
54、对所述最优关节角速度进行积分,得到最优关节角度,所述最优关节角度表示为
55、将所述最优关节角度传输至对应的跟随者机械臂的下位机控制器,以供下位机控制器驱动对应的跟随者机械臂进行运动,使所有机械臂的末端执行器跟随所述领导者机械臂的期望轨迹。
56、本技术的另一方面还提供了一种多冗余度机械臂系统的一致性规划装置,包括:
57、第一单元,用于从多冗余度机械臂系统中获取领导者机械臂的结构参数,并根据所述结构参数建立所述领导者机械臂的逆运动学方程,以获得所述领导者机械臂的期望轨迹;
58、第二单元,用于根据冗余度机械臂系统的实际工作目标,确定以重复运动指标作为性能指标的时变二次规划问题模型;
59、第三单元,用于根据冗余度机械臂系统中各个机械臂的通信网络结构,以有向拓扑图来描述冗余度机械臂系统中所述领导者机械臂与各个跟随者机械臂的交互关系,以及各个跟随者机械臂之间的交互关系;
60、第四单元,用于获取预先构建的迭代学习网络求解算法,并根据所述迭代学习网络求解算法求解得到的各个跟随者机械臂的关节角速度控制量,所述迭代学习网络求解算法为根据冗余度机械臂系统的可重复特性构建得到;
61、第五单元,用于将各个所述关节角速度控制量传输至对应的跟随者机械臂的下位机控制器,以供下位机控制器驱动对应的跟随者机械臂进行运动,使所有机械臂的末端执行器跟随所述领导者机械臂的期望轨迹。
62、本技术的另一方面还提供了一种电子设备,包括处理器以及存储器;
63、所述存储器用于存储程序;
64、所述处理器执行所述程序实现所述的方法。
65、本技术的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,所述程序被处理器执行实现所述的方法。
66、本技术还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。电子设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该电子设备执行上述的方法。
67、本技术首先获取领导者机械臂的结构参数并据此获得领导者机械臂的期望轨迹,进而根据实际工作目标确定二次规划问题模型,再以有向拓扑图来描述各个机械臂之间的交互关系,并利用预先构建的迭代学习网络求解算法求解得到的各个跟随者机械臂的关节角速度控制量,最后将各个关节角速度控制量传输至对应的跟随者机械臂的下位机控制器,以供下位机控制器驱动对应的跟随者机械臂进行运动,使所有机械臂的末端执行器跟随所述领导者机械臂的期望轨迹;本技术可以实现领导者机械臂跟踪期望轨迹的任务,还可以实现跟随者机械臂在有限时间内跟踪上领导者机械臂的轨迹,即可以实现多机械臂系统的一致性规划。
- 还没有人留言评论。精彩留言会获得点赞!