一种多自由度臂架运动规划方法、装置、设备及存储介质与流程
本申请涉及智能规划领域,尤其涉及一种多自由度臂架运动规划方法、装置、设备及存储介质。
背景技术:
1、现有电液多关节臂架中的各个关节共用液压流量源,在臂架运动规划过程中,选择运动的关节数量越多,液压阀组流量分配的压力就越大,这样就会因压力切断造成流量供给骤降,导致关节轨迹跟踪误差超限的风险就会越大,基于上述原因可以得出,在同一时刻联动的关节数量越少关节轨迹跟踪误差超限的风险就会越小,在作业过程中风险越小越好;同时,现有多关节臂架是典型的冗余自由度臂架,其冗余自由度越多,也就是说同一时刻联动的关节数量越多,多关节臂架的灵活性就越高,越有利于在臂架避障、狭小空间作业等工况下,进行臂架局部姿态的调整。目前采用的臂架运动规划算法针对联动关节数量与运动灵活度的优化相互独立,导致综合优化效果较差。
技术实现思路
1、本申请提供了一种多自由度臂架运动规划方法、装置、设备及存储介质,在臂架运动规划时,同时考虑减少运动关节数量和提升臂架灵活性,解决两者之间的相互矛盾,提升臂架运动规划综合优化效果。
2、第一方面,本申请提供了一种多自由度臂架运动规划方法,包括:
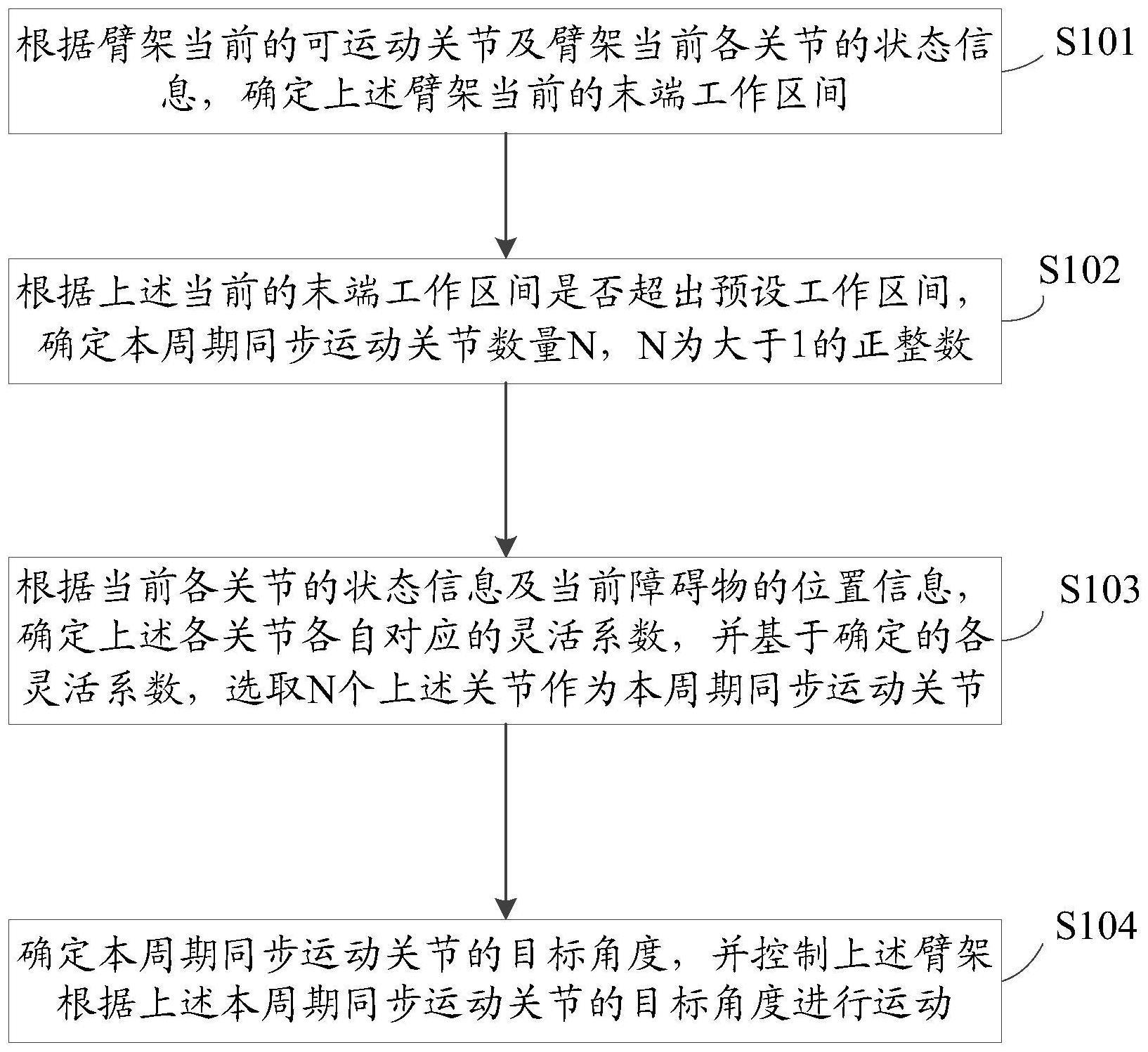
3、根据臂架当前的可运动关节及臂架当前各关节的状态信息,确定所述臂架当前的末端工作区间;
4、根据所述当前的末端工作区间是否超出预设工作区间,确定本周期同步运动关节数量n,n为大于1的正整数;
5、根据当前各关节的状态信息及当前障碍物的位置信息,确定所述各关节各自对应的灵活系数,并基于确定的各灵活系数,选取n个所述关节作为本周期同步运动关节;
6、确定本周期同步运动关节的目标角度,并控制所述臂架根据所述本周期同步运动关节的目标角度进行运动。
7、在一个或多个可能的实施例中,基于确定的各灵活系数,选取n个所述关节作为本周期同步运动关节,包括:
8、基于所述各关节各自对应的灵活系数、预设权重及各关节当前关节角对应的正态分布函数,确定所述各关节各自对应的优先系数;其中,所述正态分布函数根据预设均值和预设标准差构造;
9、根据各优先系数,选取n个所述关节作为本周期同步运动关节。
10、在一个或多个可能的实施例中,根据当前各关节的状态信息及当前障碍物的位置信息,确定所述各关节各自对应的灵活系数,包括:
11、根据当前各关节的状态信息,确定所述各关节关联臂节当前的位置信息;
12、根据传感器确定所述障碍物的位置信息;
13、根据各臂节当前的位置信息与所述障碍物的位置信息,确定所述各臂节与所述障碍物的距离;
14、根据所述各臂节各自对应的距离与预设极限距离的比较结果,确定所述各臂节关联关节各自的灵活系数。
15、在一个或多个可能的实施例中,根据所述当前的末端工作区间是否超出预设工作区间,确定本周期同步运动关节数量n,包括:
16、将所述臂架当前末端工作区间与预设工作区间进行对比;
17、确定所述臂架当前末端工作区间不超过所述预设工作区间范围时,将上周期同步运动关节的数量减少预设步长,得到第一数量;若所述第一数量不小于所述预设固定值,则将所述第一数量作为本周期同步运动关节数量n;若所述第一数量小于所述预设固定值,则将第一数量增加预设步长后得到第二数量,作为本周期同步运动关节数量n;
18、确定所述臂架当前末端工作区间超过所述预设工作区间范围时,将上周期同步运动关节的数量增加预设步长后得到第三数量,作为本周期同步运动关节数量n。
19、在一个或多个可能的实施例中,所述方法还包括:
20、确定当前为初始周期时,所述各关节的灵活系数为预设灵活系数。
21、在一个或多个可能的实施例中,根据臂架当前的可运动关节及臂架当前各关节的状态信息,确定所述臂架当前的末端工作区间,包括:
22、根据臂架当前的可运动关节及臂架当前各关节的状态信息,确定雅可比矩阵及雅可比矩阵的伪逆矩阵,并根据所述雅可比矩阵及雅可比矩阵的伪逆矩阵确定条件数k,其中所述条件数k表征臂架各方向上的运动能力;
23、确定所述条件数k不小于预设条件数,或者根据预先获取的障碍物信息确定存在障碍物时,根据所述臂架当前的可运动关节及臂架当前各关节的状态信息,确定所述臂架当前的末端工作区间。
24、在一个或多个可能的实施例中,确定本周期同步运动关节的目标角度,包括:
25、根据本周期同步运动关节更新所述雅可比矩阵及雅可比矩阵的伪逆矩阵;
26、根据更新的雅可比矩阵及雅可比矩阵的伪逆矩阵,结合逆运动学规则确定本周期同步运动关节的目标角度。
27、在一个或多个可能的实施例中,所述方法还包括:
28、确定所述条件数k小于预设条件数且不存在障碍物时,根据预设目标选取规则选取目标关节并基于逆运动学规则确定所述目标关节对应的目标角度,并控制所述臂架根据所述目标关节对应的目标角度进行运动。
29、第二方面,本申请还提供了一种多自由度臂架运动规划装置,所述装置包括:
30、工作区间确定模块,用于根据臂架当前的可运动关节及臂架当前各关节的状态信息,确定所述臂架当前的末端工作区间;
31、同步运动关节数量确定模块,用于根据所述当前的末端工作区间是否超出预设工作区间,确定本周期同步运动关节数量n,n为大于1的正整数;
32、同步运动关节确定模块,用于根据当前各关节的状态信息及当前障碍物的位置信息,确定所述各关节各自对应的灵活系数,并基于确定的各灵活系数,选取n个所述关节作为本周期同步运动关节;
33、目标角度确定模块,用于确定本周期同步运动关节的目标角度,并控制所述臂架根据所述本周期同步运动关节的目标角度进行运动。
34、第三方面,本申请提供了一种多自由度臂架运动规划设备,所述设备包括:
35、至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面中任何一项所述的多自由度臂架运动规划方法。
36、第四方面,本申请还提供了一种存储介质,所述存储介质存储有计算机程序,所述计算机程序用于使计算机执行如第一方面中任何一项所述的多自由度臂架运动规划方法。
37、根据本申请提供的一种多自由度臂架运动规划方法、装置、设备及存储介质,首先根据臂架当前的工作区间确定本周期的同步运动关节数量,再根据各关节各自对应的灵活系数,确定选取对应的同步运动关节;同时考虑了同步运动关节的数量和各关节各自对应的灵活系数两方面,对臂架作业过程中关节轨迹跟踪误差超限的风险和臂架的灵活性同时进行了考虑,用于保证臂架在运动过程中的综合性更好。
技术特征:
1.一种多自由度臂架运动规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于确定的各灵活系数,选取n个所述关节作为本周期同步运动关节,包括:
3.根据权利要求1所述的方法,其特征在于,根据当前各关节的状态信息及当前障碍物的位置信息,确定所述各关节各自对应的灵活系数,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述当前的末端工作区间是否超出预设工作区间,确定本周期同步运动关节数量n,包括:
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,根据臂架当前的可运动关节及臂架当前各关节的状态信息,确定所述臂架当前的末端工作区间,包括:
7.根据权利要求6所述的方法,其特征在于,确定本周期同步运动关节的目标角度,包括:
8.根据权利要求6所述的方法,其特征在于,所述方法还包括:
9.一种多自由度臂架运动规划装置,其特征在于,所述装置包括:
10.一种多自由度臂架运动规划设备,其特征在于,所述设备包括:
11.一种存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序用于使计算机执行如权利要求1-8中任何一项所述的多自由度臂架运动规划方法。
技术总结
本申请提供一种多自由度臂架运动规划方法、装置、设备及存储介质,包括:根据臂架当前的可运动关节及各关节的状态信息,确定臂架当前的末端工作区间;根据当前的末端工作区间是否超出预设工作区间,确定本周期同步运动关节数量N;根据当前各关节的状态信息及当前障碍物的位置信息,确定各关节各自对应的灵活系数,并基于确定的各灵活系数,选取N个关节作为本周期同步运动关节;确定本周期同步运动关节的目标角度,并控制臂架根据本周期同步运动关节的目标角度进行运动;在臂架运动规划时,同时考虑减少运动关节数量和提升臂架灵活性,解决两者之间的相互矛盾,提升臂架运动规划综合优化效果。
技术研发人员:皮皓杰,于晓颖,朱昱鑫,刘延斌,尹君
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!