一种基于北斗导航控制系统的移动充电机器人的制作方法
本发明涉及充电机器人,具体涉及到一种基于北斗导航控制系统的移动充电机器人。
背景技术:
1、移动充电机器人是一种能够自主移动并为电动设备或机器人提供充电服务的智能机器人。这种机器人通常需要具备自主导航功能,能够在室内或室外环境中自由移动,并找到电动设备或机器人的位置。一旦找到目标设备,它可以自动连接充电接口,并为设备充电,无需人工干预。
2、在工厂、仓库等地,移动充电机器人可以为机器人、agv(自动导引车)等自动化充电设备提供充电,确保它们持续运作。在公共领域的充电站中,移动充电机器人可以为新能源电车、电动车等自动化充电设备提供充电,确保它们持续运作。
3、尽管移动充电机器人在新能源电车领域带来了一些创新和便利,但在导航以及适应不同充电需求方面,仍存在一些缺陷和挑战。
4、其一,自主导航是移动充电机器人的核心功能,机器人需要能够准确地识别并避开障碍物、行人和其他车辆,确保安全的移动,但在复杂、拥挤或未知的环境中,自主导航可能会变得困难;
5、其二,移动充电机器人需要精确地定位充电设备的位置和充电接口,以确保正确连接移动充电机器人的充电口。在复杂的停车场或室外环境中,定位可能会受到干扰,导致移动充电机器人难以准确对接;
6、其三,对于一些需要高功率快速充电(如快充站或高需求时段)的场景,以及对于需要低功率(较小容量的电动车辆或充电需求较少)的情况,现有的移动充电机器人的充电功率、速率可能无法满足多样化的要求。
7、因此,存在待改进之处,本发明提供一种基于北斗导航控制系统的移动充电机器人。
技术实现思路
1、针对现有技术所存在的不足,本发明目的在于提出一种基于北斗导航控制系统的移动充电机器人,具体方案如下:
2、一种基于北斗导航控制系统的移动充电机器人,用于充电站,所述移动充电机器人通讯连接有北斗导航控制系统、充电设备、远程控制端;
3、充电站,用于停放移动充电机器人、充电设备;
4、北斗导航控制系统,用于获取充电设备、用户、移动充电机器人的定位信息,并规划充电设备、移动充电机器人的充电路径;
5、远程控制端,由用户操作,用于启动移动充电机器人;
6、移动充电机器人,基于北斗导航控制系统规划的最优充电路径移动至充电设备附近,并识别充电设备的充电需求以及调整成对应的充电参数对充电设备进行自动充电。
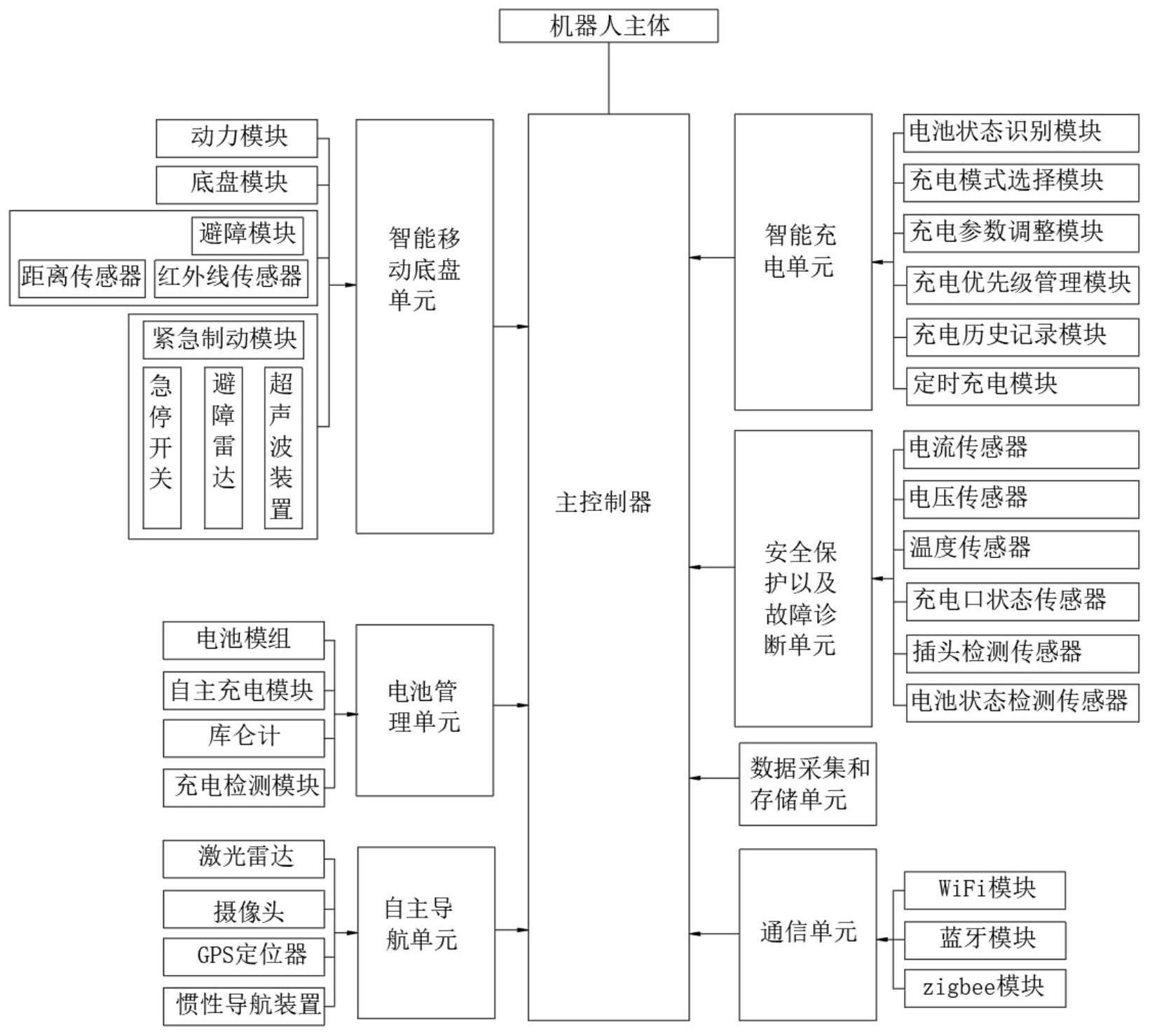
7、进一步的,移动充电机器人包括机器人本体;
8、机器人本体中集成有主控制器以及与主控制器电连接的自主导航单元、通信单元、智能移动底盘单元、智能充电单元以及电池管理单元;
9、主控制器,用于接收来自远程控制端中用户的命令;
10、自主导航单元,用于与北斗导航控制系统配合,对移动充电机器人定位以及导航;
11、通信单元,用于完成移动充电机器人与远程控制端的通讯连接;
12、智能移动底盘单元,用于接收定位信息并根据最优充电路径在导航过程中控制移动充电机器人的各个运动动作;
13、智能充电单元,用于检测充电设备,并调整充电参数后对充电设备以适配的充电方式充电;
14、电池管理单元,用于对移动充电机器人自身进行充电以及电量监测。
15、进一步的,智能移动底盘单元包括动力模块、底盘模块、避障模块以及紧急制动模块;
16、动力模块与底盘模块配合完成移动充电机器人的各个运动动作;
17、避障模块,包括距离传感器、红外线传感器,用于识别充电站以及充电站中的障碍物的位置信息,并反馈给自主导航单元、北斗导航控制系统;
18、紧急制动模块,用于自主控制移动充电机器人停止运动。
19、进一步的,智能充电单元包括电池状态识别模块、充电模式选择模块、充电参数调整模块、充电优先级管理模块、充电历史记录模块以及定时充电模块;
20、电池状态识别模块,用于识别充电设备的电池状态;
21、充电历史记录模块,用于记录充电设备的充电记录,包括开始时间、结束时间、充电功率,将充电历史记录反馈给充电参数调整模块;
22、充电模式选择模块,用于切换移动充电机器人不同的充电模式;
23、充电参数调整模块,用于调整移动充电机器人的充电功率、充电时间;
24、充电优先级管理模块,用于调整移动充电机器人对不同充电设备的充电顺序;
25、定时充电模块,用于设定移动充电机器人在特定时间对充电设备进行自动启动充电;
26、充电模式选择模块、充电优先级管理模块、定时充电模块接收来自用户在远程控制端中的命令。
27、进一步的,电池管理单元包括电池模组、自主充电模块、库仑计以及充电检测模块;
28、电池模组,用于供电以及可循环充电;
29、自主充电模块,用于对电池模组进行充电;
30、库仑计,用于监实时测电池模组的电量值,并将电量值反馈给充电检测模块;
31、当电量值低于设定值,充电检测模块控制自主充电模块工作。
32、进一步的,机器人本体上安装有若干个充电枪,每个充电枪对应连接有一个充电口,每个充电口的类型不同,用于与充电设备的充电接口匹配。
33、进一步的,机器人本体中还集成有安全保护以及故障诊断单元,安全保护以及故障诊断单元用于对充电过程中的异常状态以及故障进行监测,并控制移动充电机器人做出停止充电、发出警报动作。
34、进一步的,机器人本体还集成有数据采集和存储单元,用于记录充电过程中的数据。
35、进一步的,移动充电机器人的工作过程为:
36、步骤一:将基于北斗导航控制系统的移动充电机器人放置在充电站的初始位置处,确保移动充电机器人能够自由移动,并与远程控制端、充电设备通讯连接;
37、步骤二:通过远程控制端,启动移动充电机器人,移动充电机器人利用北斗导航控制系统进行定位和导航,找到充电设备和用户,并规划出充电设备、移动充电机器人的最优充电路径;
38、步骤三:根据充电设备选择合适的充电口,并将充电设备连接到移动充电机器人的充电口上;
39、步骤四:移动充电机器人自动调整充电功率和充电时间,用户根据需求选择充电模式或者设定定时充电后,移动充电机器人对进行充电;
40、步骤五:充电完成后,移动充电机器人会发出提示音,断开充电枪,用户可以断开充电设备,移动充电机器人会根据充电优先级顺序移动到下一个充电设备附近;
41、之后,重复步骤三至步骤五,直至完成对各个充电设备的充电;
42、最后,移动充电机器人根据北斗导航控制系统的导航返回在充电站的初始位置。
43、与现有技术相比,本发明的有益效果如下:
44、(1)在充电站这个应用场景,地形较为简单、宽阔,无需设置自主导航,利用北斗导航控制系统获取移动充电机器人、充电设备的经纬度坐标,并通过导航算法计算出移动充电机器人向着充电设备移动的移动路径,移动充电机器人能够利用北斗导航控制系统准确定位和导航,实现自主移动和定位,不需要人工干预。移动充电机器人根据充电设备的类型的不同、充电场景的不同,可以自动调整每次充电时移动充电机器人的充电功率的大小,以便满足不同充电设备的充电需求,从而提供最佳的充电效果和充电速度,确保设备充电安全和高效。
45、(2)基于北斗导航控制系统的移动充电机器人,通过充电功率选择、充电模式选择、定时充电、充电优先级管理、充电历史记录、用户提醒和通知,以及远程管理和控制等功能的实现,移动充电机器人能够提供灵活、便捷的充电体验。
- 还没有人留言评论。精彩留言会获得点赞!