直线驱动设备及人形机器人的制作方法
本申请属于机器人设备,尤其涉及一种直线驱动设备及人形机器人。
背景技术:
1、人形机器人是仿人形设计的,其上各个关节部位的运动功能十分接近人体关节的运动功能,例如膝关节,通过设计膝关节活动副来实现膝关节的运动。
2、在对人体的膝关节运动过程的研究中,膝关节活动副在不同的运动动作时对动力的需求是不一样的,膝关节活动副的负荷随人体的运动和步态方式有很大的变化。在人体处于双足着地的站立位静态时,膝关节活动副的受力为人体体重的0.43倍。在人体处于平地行走动态时,膝关节活动副的受力可达人体体重的3.02倍。在人体处于上楼动态时,膝关节活动副的受力则可达到人体体重的4.25倍。
3、目前,人形机器人的关节部位采用的伺服动力源一般都为旋转驱动器。然而,旋转驱动器输出力一般都不是很大,难以满足人形机器人的关节部位需求的运动爆发力,尤其是膝关节部位需求的运动爆发力。
技术实现思路
1、本申请的目的在于提供一种直线驱动设备及人形机器人,旨在解决目前的人形机器人的关节部位采用的旋转驱动力难以满足关节部位需求的运动爆发力的问题。
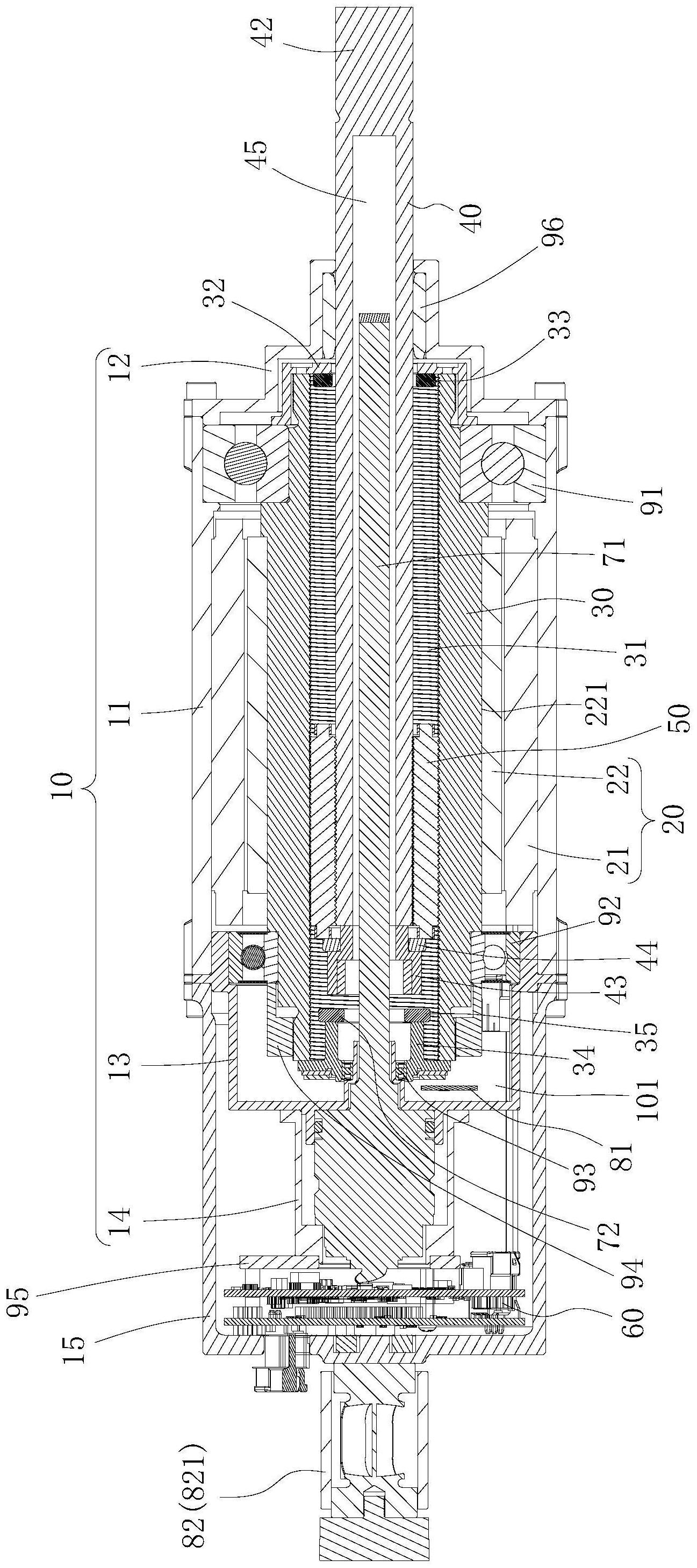
2、为实现上述目的,本申请采用的技术方案是:一种直线驱动设备,包括:
3、机壳,设有装配空间;
4、电机,安装于装配空间内,电机包括定子和转子,定子套设于转子,定子沿转动轴线方向设有贯通孔,贯通孔的孔轴线与转动轴线同轴;
5、螺母,转动安装于机壳,螺母固定在贯通孔内以随转子同步转动,螺母设有螺纹通孔;
6、丝杆,设置于螺纹通孔内,丝杆设有外螺纹段,且丝杆的输出端穿出螺纹通孔;
7、滚柱丝杠组件,包括多个螺纹滚柱,各个螺纹滚柱围绕丝杆间隔设置于螺纹孔内,各个螺纹滚柱的外螺纹与螺纹通孔的内螺纹及各个螺纹滚柱的外螺纹与外螺纹段的外螺纹均适配啮合。
8、在本申请的一些实施例中,丝杆背离输出端的一端连接有止挡头,止挡头朝向输出端的一侧设置有第一止挡环,螺母朝向输出端的一端连接有第一端帽,第一端帽背离输出端的一侧设置有第二止挡环,滚柱丝杠组件位于第一止挡环和第二止挡环之间,第一止挡环和第二止挡环分别用于阻挡滚柱丝杠组件的两端。
9、在本申请的一些实施例中,螺母背离输出端的一端连接有第二端帽,第二端帽朝向输出端的一侧设置有第三止挡环,第三止挡环用于阻挡止挡头背离丝杆的一端。
10、在本申请的一些实施例中,直线驱动设备还包括控制模块和位移传感器组件,控制模块安装于机壳,位移传感器组件包括磁滞杆和磁环,磁环安装于止挡头,磁滞杆的第一端安装于机壳,丝杆设有容纳腔,磁滞杆的第二端依次穿过机壳、磁环并延伸入容纳腔,磁滞杆与控制模块电连接,电机与控制模块电连接。
11、在本申请的一些实施例中,直线驱动设备还包括编码器,编码器安装于机壳,编码器与控制模块电连接,编码器与螺母背离输出端的一端相对设置,编码器用于检测螺母的转速。
12、在本申请的一些实施例中,机壳包括主体壳、第一端壳和第二端壳,第一端壳和第二端壳分别盖合于主体壳的两端,以形成装配空间,螺母转动安装于主体壳,输出端穿出第一端壳,磁滞杆的第一端安装于第二端壳的外侧壁,编码器安装于第二端壳的内侧壁。
13、在本申请的一些实施例中,机壳还包括第三端壳,第三端壳连接于第二端壳的外侧壁,第三端壳用于罩盖住磁滞杆的第一端,控制模块安装于第三端壳背离第二端壳的一侧。
14、在本申请的一些实施例中,直线驱动设备还包括力检测装置,力检测装置包括传感模块和检测构件,传感模块安装于机壳,传感模块与控制模块电连接,检测构件与输出端连接,且检测构件与传感模块电连接,力检测装置用于检测输出端输出的拉力或压力。
15、在本申请的一些实施例中,直线驱动设备还包括护壳,护壳连接于机壳,护壳罩盖住控制模块和磁滞杆的第一端,传感模块安装于护壳的外侧壁。
16、根据本申请的另一方面,提供了一种人形机器人。具体的,该人形机器人包括如前述的直线驱动设备,直线驱动设备用作人形机器人的关节活动副的动力源。
17、本申请至少具有以下有益效果:
18、应用该直线驱动设备作为人形机器人作为动力源,丝杆的输出端沿丝杆的轴线方向往复运动以输出动力。当电机启动,转子转动带动螺母同步转动,由于螺纹滚柱的外螺纹与螺纹通孔的内螺纹适配啮合,则螺母带动各个螺纹滚柱转动,又由于各个螺纹滚柱的外螺纹与丝杆的外螺纹段的外螺纹适配啮合,且输出端装配至人形机器人的关节部位后被限制而无法转动,因而各个螺纹滚柱一同带动丝杆沿丝杆的轴线方向往复运动,则输出端输出动力。在该直线驱动设备工作的过程中,螺母带动各个螺纹滚柱转动,同时地各个螺纹滚柱绕丝杆的轴线转动,因此,螺母、各个螺纹滚柱及外螺纹段相互配合实现了大转速比减速,也就是减速增矩明显增强,输出端能够输出更强的爆发力。因此,该直线驱动设备能够提供高额定动载。
技术特征:
1.一种直线驱动设备,其特征在于,包括:
2.根据权利要求1所述的直线驱动设备,其特征在于,
3.根据权利要求2所述的直线驱动设备,其特征在于,
4.根据权利要求2或3所述的直线驱动设备,其特征在于,
5.根据权利要求4所述的直线驱动设备,其特征在于,
6.根据权利要求5所述的直线驱动设备,其特征在于,
7.根据权利要求6所述的直线驱动设备,其特征在于,
8.根据权利要求4所述的直线驱动设备,其特征在于,
9.根据权利要求8所述的直线驱动设备,其特征在于,
10.一种人形机器人,其特征在于,包括如权利要求1-9任一项所述的直线驱动设备,所述直线驱动设备用作所述人形机器人的关节活动副的动力源。
技术总结
本申请属于机器人设备,尤其涉及一种直线驱动设备及人形机器人。其中,直线驱动设备包括:机壳,设有装配空间;电机,安装于装配空间内,电机包括定子和转子,定子套设于转子,定子设有贯通孔;螺母,转动安装于机壳,螺母固定在贯通孔内以随转子同步转动,螺母设有螺纹通孔;丝杆,设置于螺纹通孔内,丝杆设有外螺纹段,且丝杆的输出端穿出螺纹通孔;滚柱丝杠组件,包括多个螺纹滚柱,各个螺纹滚柱围绕丝杆间隔设置于螺纹孔内,各个螺纹滚柱的外螺纹与螺纹通孔的内螺纹及各个螺纹滚柱的外螺纹与外螺纹段的外螺纹均啮合。应用本申请技术方案旨在解决目前的人形机器人的关节部位采用的旋转驱动力难以满足关节部位需求的运动爆发力的问题。
技术研发人员:李汉平,梁振楠,杜旭超,王浩,周博
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!