一种基于工业机器人的多功能夹具及其使用方法与流程
本发明涉及夹具,具体为一种基于工业机器人的多功能夹具及其使用方法。
背景技术:
1、工业机器人广泛应用于自动化生产行业中,夹具是机器人用来夹持产品的部件,一般一种夹具只能够夹持一种类型的产品,当需要对不同产品进行夹持时往往需要更换夹具,更换起来也比较麻烦,且也会额外耗费购买夹具的资金。
2、现有的夹具存在的缺陷是:
3、1、专利文件cn213796560u公开了一种工业机器人用多功能夹具,“为解决现有技术中的现有的工业机器人所使用的夹具种类繁多,但每种夹具对于其自身的工作范围都着一定的限度要求,一旦超出工作限度便需要更换其他规格的夹具的问题。所述第一金属夹杆的第二金属夹杆的内侧均设置有槽体夹板,且槽体夹板与第一金属夹杆的第二金属夹杆通过螺钉连接,所述第一金属夹杆的第二金属夹杆的底部设置有侧边页板,且侧边页板与第一金属夹杆的第二金属夹杆固定连接,所述侧边页板的内侧设置有内转槽,且内转槽的内部设置有平展活动轴块,所述侧边页板的外表面设置有夹杆限位槽,且平展活动轴块的外表面设置有轴块限位槽,”该专利中的夹具能够根据产品的体积大小更换大型夹具和小型夹具,但是该夹具对多面柱体进行夹持时,无法保证多面柱体的侧面与夹具的面平行,从而造成夹具与多面柱体的侧面接触面积较小,容易造成夹持不稳定的情况,因此需要一种能够调节夹具的角度以便于夹具与多面柱体的侧面平行以增加夹具与多面柱体的接触面积的基于工业机器人的多功能夹具来解决该问题。
4、2、专利文件ep2784335b1公开了一种夹具组件,“包括用于向杆的外表面施加径向压缩力的夹具主体,该夹具主体包括第一端部和第二端部;在夹具主体的第一和第二端部之间延伸的连接构件,该连接构件具有第一端部和第二端部;连接到连接构件的第一端的致动器,在使用中,当闭合夹具时,致动器将夹具主体的第二端部分朝向夹具主体的第一端部分并相对于连接构件移动;连接构件的第二端部通过弹性安装件连接到夹具本体的第一端部,当闭合夹具时,弹性安装件抵抗致动器的作用,并允许连接构件的第二端部和夹具本体的第一端部之间的相对运动。还提供了一种快速释放夹具组件,包括:夹具主体,用于向杆的外表面施加径向压缩力,夹具主体包括第一端部和第二端部;在夹具主体的第一和第二端部之间延伸的连接构件,该连接构件具有第一端部和第二端部;连接到连接构件的第一端部的致动器,在使用中,当闭合夹具时,致动器将夹具主体的第二端部朝向夹具主体的第一端部并相对于连接构件移动,致动器将力施加到夹具主体的第二端部的表面;和致动器之间的垫片。夹具组件可用于例如伸缩杆组件中,”该专利中的夹具在对桶体进行夹持时,只能够夹持桶体的外侧,如果桶体强度和硬度较低,容易在夹持桶体时使桶体变形,进而使得对桶体的夹持不稳定,因此需要一种能够增加对桶体进行夹持时的稳定性的基于工业机器人的多功能夹具来解决该问题。
5、3、专利文件jp2012117640a公开了一种夹具,“夹具包括基座30和安装部32.安装部32具有支撑部40,分支部42和防拔出部44.支撑部40插入安装孔。分支部分42从支撑部分40分支。拉出防止部分44布置在分支部分42上。卡在安装孔的边缘的拉出防止爪50布置在拉出防止部分44.与防拉出部分44的另一端相比,防脱出部分44的一端与支撑部分40接近。防脱出部分44的一端移动到分开当支撑部分40的另一端在支撑部分40的方向上移动时,支撑部分40进一步保持维护部分52,并且维护部分52保持拉出防止部分44的状态拉出防止部分44移动以使其一端与支撑部分40分开,”该专利中的夹具可以对高于平台的工件进行夹持,当工件位于料盒内部时,由于该夹具本身占用一定的空间,不方便进入料盒内部对工件进行夹持,因此不便于对料盒内部的工件进行夹紧,因此需要一种能够方便夹取料盒内部的工件的基于工业机器人的多功能夹具来解决该问题。
6、4、专利文件ep1285870a1公开了夹具装置,“包括用于在单元(10)的两个相对纵向侧上接合单元(10)的夹持构件(2),以便单元(10)在封闭之后被拾取,转移并随后以受控方式放置在外包装夹持装置还包括用于至少在释放闭合单元(10)期间保持盖(12)闭合的夹紧构件(20)。在使用该夹持装置(1)时,可以使用垂直悬挂在夹持构件(20)中的金属片(30)。因此,以有利的方式实现的是,例如蛋容器的单元(10),特别是在它们的释放过程中,不会卡扣打开,并且单元(10)的相对位置以及因此用于填充外包装,维护,”该专利中的夹具没有加湿组件,如果给该夹具设置吸盘组件对工件进行吸附,工件上干燥时如果有灰尘容易造成吸盘吸附工件不稳定的情况,通过对工件进行加湿可以显著增加吸盘对工件的吸附能力,因此需要一种能够对工件进行加湿的基于工业机器人的多功能夹具来解决该问题。
技术实现思路
1、本技术的一个目的在于提供一种基于工业机器人的多功能夹具及其使用方法,能够解决现有技术中提出的技术问题。
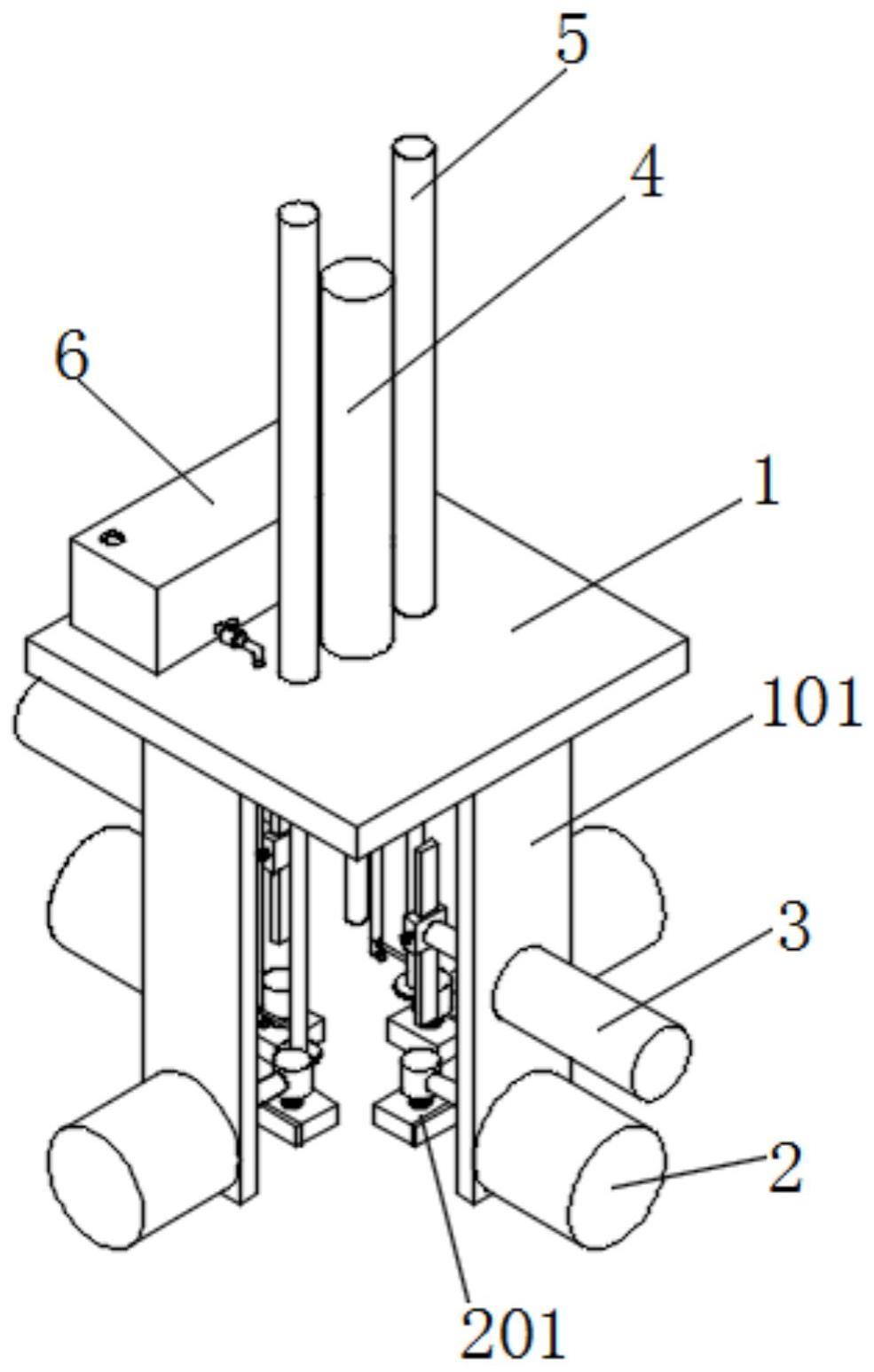
2、为实现上述目的,本发明提供如下技术方案:一种基于工业机器人的多功能夹具,包括第一安装板、第一液压缸和第二液压缸,所述第一安装板的底部对称安装有多个第二安装板,所述第二安装板的一侧安装有第一液压缸,所述第一液压缸的输出端安装有安装柱,所述安装柱的底部贯穿安装有第一螺纹杆,所述第一螺纹杆的一端安装有夹块;
3、所述第二安装板的一侧安装有第二液压缸,所述第二液压缸的输出端安装有导向框,所述导向框的顶部贯穿活动安装有夹杆,所述第一安装板的顶部对称安装有吸附组件,吸附组件用来吸附轻质工件。
4、优选的,所述第一安装板的顶部对称贯穿开设有通孔。
5、优选的,所述夹块的一侧安装有橡胶垫。
6、优选的,所述导向框的正面贯穿安装有第二螺纹杆。
7、优选的,所述第一安装板的顶部安装有第三液压缸,第三液压缸的输出端安装有第一活塞杆。
8、优选的,所述吸附组件包括第四液压缸、第二活塞杆和吸盘,第四液压缸的底部与第一安装板的顶部相连接,第四液压缸的输出端安装有第二活塞杆,第二活塞杆的一端安装有吸盘。
9、优选的,所述第一安装板的顶部安装有水箱,水箱的输出端对称安装有电磁阀,电磁阀的输出端安装有软管,且软管位于通孔的内部。
10、优选的,所述第二活塞杆的一侧安装有连接杆,连接杆的一端安装有弯管,且弯管的输入端与软管的输出端相连接。
11、优选的,所述基于工业机器人的多功能夹具的使用方法如下:
12、s1、将第一安装板与机器人连接起来,机器人带动第一安装板下移,使夹块下移到工件的外侧,然后第一液压缸带动夹块向内侧移动对工件进行夹紧,当工件为多面柱体时,夹块能够通过转动使得夹块的一侧与多面柱体四周的斜面相平行接触,进而增加于多面柱体的接触面积,增加对多面柱体的夹持稳定性;
13、s2、当工件为桶体时,可以通过向下调节夹杆,在机器人带动夹杆和夹块下移时,夹块对桶体的外侧进行夹持,同时夹杆伸入桶体内部,夹杆对桶体的内壁进行挤压,进而使得夹块和夹杆能够对桶体的桶壁进行夹持固定,进一步增加了对桶体形状工件的夹持稳定性;
14、s3、当工件的顶部为平面,且工件位于料盒内部时,夹块因占用空间的原因不方便进入料盒内部夹持工件时,可以通过第四液压缸带动吸盘下移对工件的顶部进行吸附,进而可以方便将料盒内部的工件吸住,从而方便将料盒内部的工件向上移出料盒,进而便于夹块对工件进行夹持。
15、优选的,在所述s3中还包括如下步骤:
16、s31、在吸盘吸附工件之前,可以通过电磁阀开启使水箱内部的水进入软管内部,然后进入弯管内部,并且水从弯管排出对工件的顶部进行润湿,进而增加吸盘对工件的吸附稳定性。
17、与现有技术相比,本发明的有益效果是:
18、1、本发明第一安装板下移,使夹块下移到工件的外侧,然后第一液压缸带动夹块向内侧移动对工件进行夹紧,当工件为多面柱体时,夹块能够通过转动使得夹块的一侧与多面柱体四周的斜面相平行接触,进而增加于多面柱体的接触面积,增加对多面柱体的夹持稳定性,使基于工业机器人的多功能夹具在工件为多面柱体时,夹块能够通过转动使得夹块的一侧与多面柱体四周的斜面相平行接触,进而增加于多面柱体的接触面积,增加对多面柱体的夹持稳定性。
19、2、本发明在工件为桶体时,可以通过向下调节夹杆,在机器人带动夹杆和夹块下移时,夹块对桶体的外侧进行夹持,同时夹杆伸入桶体内部,夹杆对桶体的内壁进行挤压,进而使得夹块和夹杆能够对桶体的桶壁进行夹持固定,进一步增加了对桶体形状工件的夹持稳定性,使基于工业机器人的多功能夹具在工件为桶体时,可以通过向下调节夹杆,在机器人带动夹杆和夹块下移时,夹块对桶体的外侧进行夹持,同时夹杆伸入桶体内部,夹杆对桶体的内壁进行挤压,进而使得夹块和夹杆能够对桶体的桶壁进行夹持固定,进一步增加了对桶体形状工件的夹持稳定性。
20、3、本发明在工件的顶部为平面,且工件位于料盒内部时,夹块因占用空间的原因不方便进入料盒内部夹持工件时,通过第四液压缸带动吸盘下移对工件的顶部进行吸附,进而可以方便将料盒内部的工件吸住,从而方便将料盒内部的工件向上移出料盒,进而便于夹块对工件进行夹持,使基于工业机器人的多功能夹具在工件的顶部为平面,且工件位于料盒内部时,夹块因占用空间的原因不方便进入料盒内部夹持工件时,通过第四液压缸带动吸盘下移对工件的顶部进行吸附,进而可以方便将料盒内部的工件吸住,从而方便将料盒内部的工件向上移出料盒,进而便于夹块对工件进行夹持。
21、4、本发明可以通过电磁阀开启使水箱内部的水进入软管内部,然后进入弯管内部,并且水从弯管排出对工件的顶部进行润湿,增加吸盘对工件的吸附稳定性,使基于工业机器人的多功能夹具可以通过电磁阀开启使水箱内部的水进入软管内部,然后进入弯管内部,并且水从弯管排出对工件的顶部进行润湿,增加吸盘对工件的吸附稳定性。
- 还没有人留言评论。精彩留言会获得点赞!