一种建筑工程勘探作业用自动化作业机器人
本发明涉及勘探,具体是一种建筑工程勘探作业用自动化作业机器人。
背景技术:
1、地质勘探即是通过各种手段、方法对地质进行勘查、探测,确定合适的持力层,根据持力层的地基承载力,确定基础类型,计算基础参数的调查研究活动。
2、现有的建筑工程勘探装置都是通过固定长度的脚手架或钢管来支撑,结构单一,不能任意地调整所需的高度,给施工带来不便,同时使用的时候不稳定,还容易导致意外的发生。同时现有的建筑工程勘探装置在使用时不便于移动,拆装不便,而加装移动轮的装置又缺乏稳定性,导致支撑不稳,需要多人协作,降低了工作效率。
3、故此,我们提出一种建筑工程勘探作业用自动化作业机器人。
技术实现思路
1、本发明要解决的技术问题就是克服以上的技术缺陷,提供一种建筑工程勘探作业用自动化作业机器人。
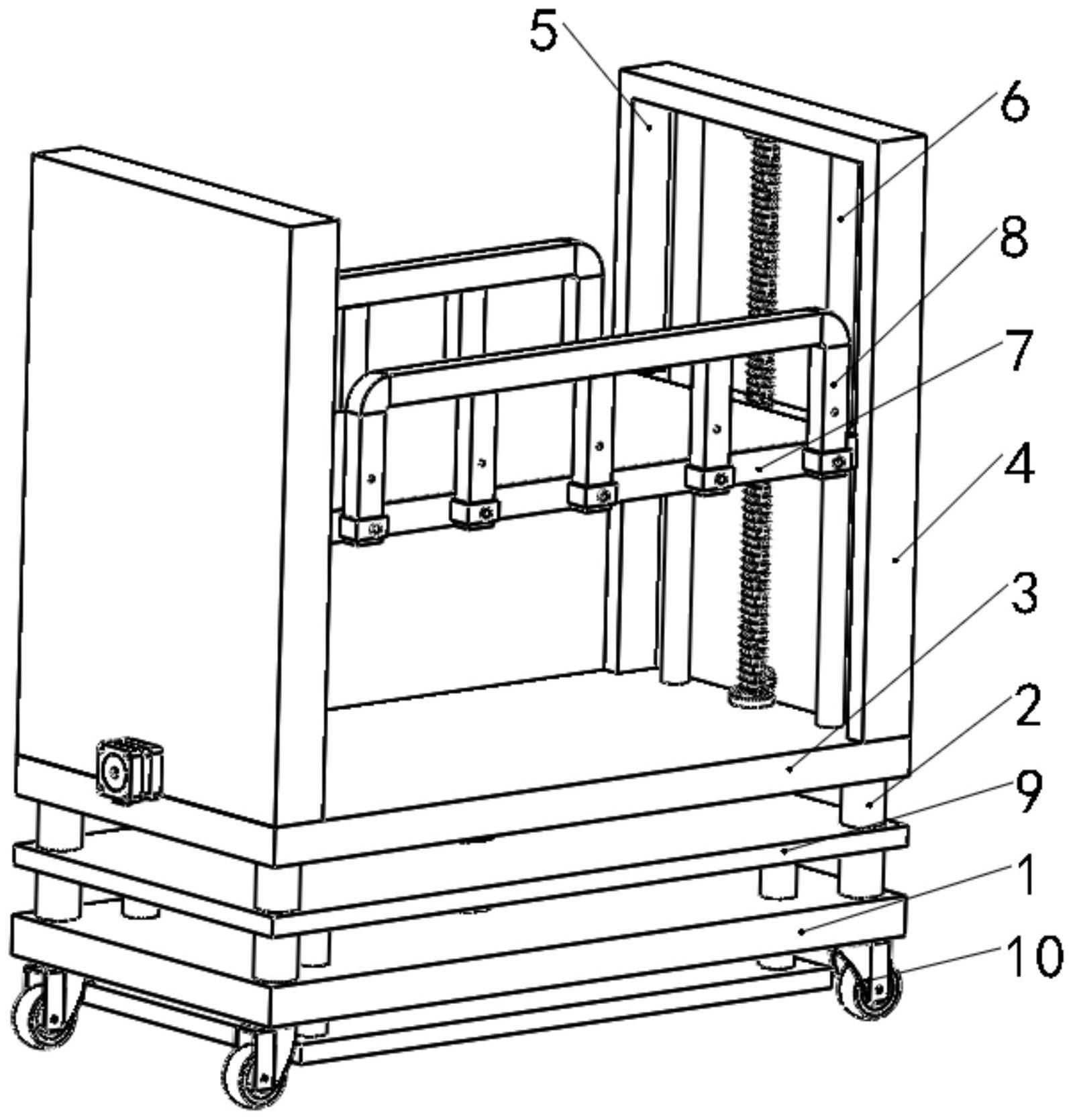
2、为了解决上述问题,本发明的技术方案为:一种建筑工程勘探作业用自动化作业机器人,包括底板,所述底板顶部四角固定连接有立杆,所述立杆顶部固定连接有安装板,所述安装板顶部两侧固定连接支撑板,两个所述支撑板相对的一侧开有非贯通的滑槽,所述滑槽内腔设有升降组件,所述升降组件包括电机、转盘,所述电机固定连接于支撑板一侧,所述电机输出端贯穿支撑板侧壁固定连接有主动锥齿轮。
3、作为本发明进一步的方案:两个所述转盘对称转动连接于滑槽内腔顶部与底部,两个所述转盘之间固定连接有螺纹杆,所述螺纹杆上固定套接有从动锥齿轮,所述从动锥齿轮与主动锥齿轮啮合连接,所述螺纹杆上套接有滑块,且所述滑块与螺纹杆通过螺纹旋槽啮合连接,两个所述滑块相对的一侧固定连接有承载板,所述承载板两侧对称设有防护组件,所述底板顶部设有支撑组件,所述底板底部四角固定连接有万向轮。
4、作为本发明再进一步的方案:所述滑槽内腔底部固定连接有滑杆一,两个所述滑杆一对称设置于螺纹杆两侧,所述滑杆一贯穿滑块,且与滑块滑动连接。
5、作为本发明再进一步的方案:所述支撑组件包括滑杆二、升降螺杆,所述滑杆二贯穿底板,且与底板滑动连接,所述滑杆二设置为四个且位于底板四角,所述滑杆二底部固定连接有支撑底板,所述滑杆二顶部固定连接有支撑顶板。
6、作为本发明再进一步的方案:所述支撑顶板顶部开有贯通的螺纹孔二,所述升降螺杆转动连接于底板顶部,所述升降螺杆贯穿螺纹孔二,且与螺纹孔二通过螺纹旋槽啮合连接,所述升降螺杆顶部固定连接有转把。
7、作为本发明再进一步的方案:所述防护组件包括固定框、防护栏、固定螺栓,所述固定框一侧固定连接于承载板一侧,所述防护栏一端贯穿固定框内腔,所述防护栏形状设置为u型,所述防护栏u型两端上均匀开有若干螺纹孔一,所述固定螺栓贯穿固定框与螺纹孔一通过螺纹旋槽啮合连接。
8、作为本发明再进一步的方案:所述防护栏内腔底部均匀固定连接有若干加固杆,所述加固杆一端贯穿固定框内腔,所述加固杆上均匀开有若干螺纹孔一,所述固定螺栓贯穿固定框与螺纹孔一通过螺纹旋槽啮合连接。
9、本发明与现有的技术相比的优点在于:
10、一、通过设置升降组件、防护组件,当装置固定在需要施工的位置后,启动电机,主动锥齿轮转动带动从动锥齿轮转动,从而带动螺纹杆转动,此时滑块带动承载板随着螺纹杆的转动可以向上或者向下运动,从而调节承载板的高度。而防护组件设置在承载板两侧,两组防护栏、加固杆通过固定框与固定螺栓固定在承载板两侧,安装拆卸方便,同时固定螺栓可以防护栏、加固杆上不同位置的螺纹孔一连接,从而将防护栏、加固杆固定在不同的高度,对承载板起到了很好的防护作用,增加勘探人员站立施工的安全性;
11、二、通过设置支撑组件,当通过万向轮把装置移动到合适的勘探位置时,转动转把带动升降螺杆转动,从而带动支撑顶板向下运动,此时滑杆二受力,在底板中向下滑动,带动支撑底板向下运动,支撑底板接触到地面后继续向下,直到支撑底板可以稳固地将装置支撑在地面,大大提高了装置整体稳定性,并有效减少勘探人员的劳动量,提高装置的实用性。
技术特征:
1.一种建筑工程勘探作业用自动化作业机器人,包括底板(1),其特征在于,所述底板(1)顶部四角固定连接有立杆(2),所述立杆(2)顶部固定连接有安装板(3),所述安装板(3)顶部两侧固定连接支撑板(4),两个所述支撑板(4)相对的一侧开有非贯通的滑槽(5),所述滑槽(5)内腔设有升降组件(6),所述升降组件(6)包括电机(6.1)、转盘(6.4),所述电机(6.1)固定连接于支撑板(4)一侧,所述电机(6.1)输出端贯穿支撑板(4)侧壁固定连接有主动锥齿轮(6.2)。
2.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:两个所述转盘(6.4)对称转动连接于滑槽(5)内腔顶部与底部,两个所述转盘(6.4)之间固定连接有螺纹杆(6.5),所述螺纹杆(6.5)上固定套接有从动锥齿轮(6.3),所述从动锥齿轮(6.3)与主动锥齿轮(6.2)啮合连接。
3.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述螺纹杆(6.5)上套接有滑块(6.7),且所述滑块(6.7)与螺纹杆(6.5)通过螺纹旋槽啮合连接,两个所述滑块(6.7)相对的一侧固定连接有承载板(7),所述承载板(7)两侧对称设有防护组件(8),所述底板(1)顶部设有支撑组件(9),所述底板(1)底部四角固定连接有万向轮(10)。
4.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述支撑组件(9)包括滑杆二(9.2)、升降螺杆(9.4),所述滑杆二(9.2)贯穿底板(1),且与底板(1)滑动连接,所述滑杆二(9.2)设置为四个且位于底板(1)四角,所述滑杆二(9.2)底部固定连接有支撑底板(9.3),所述滑杆二(9.2)顶部固定连接有支撑顶板(9.1)。
5.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述支撑顶板(9.1)顶部开有贯通的螺纹孔二(9.6),所述升降螺杆(9.4)转动连接于底板(1)顶部,所述升降螺杆(9.4)贯穿螺纹孔二(9.6),且与螺纹孔二(9.6)通过螺纹旋槽啮合连接,所述升降螺杆(9.4)顶部固定连接有转把(9.5)。
6.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述滑槽(5)内腔底部固定连接有滑杆一(6.6),两个所述滑杆一(6.6)对称设置于螺纹杆(6.5)两侧,所述滑杆一(6.6)贯穿滑块(6.7),且与滑块(6.7)滑动连接。
7.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述防护组件(8)包括固定框(8.1)、防护栏(8.2)、固定螺栓(8.4),所述固定框(8.1)一侧固定连接于承载板(7)一侧,所述防护栏(8.2)一端贯穿固定框(8.1)内腔,所述防护栏(8.2)形状设置为u型,所述防护栏(8.2)u型两端上均匀开有若干螺纹孔一(8.5),所述固定螺栓(8.4)贯穿固定框(8.1)与螺纹孔一(8.5)通过螺纹旋槽啮合连接。
8.根据权利要求1所述的一种建筑工程勘探作业用自动化作业机器人,其特征在于:所述防护栏(8.2)内腔底部均匀固定连接有若干加固杆(8.3),所述加固杆(8.3)一端贯穿固定框(8.1)内腔,所述加固杆(8.3)上均匀开有若干螺纹孔一(8.5),所述固定螺栓(8.4)贯穿固定框(8.1)与螺纹孔一(8.5)通过螺纹旋槽啮合连接。
技术总结
本发明涉及勘探技术领域,具体是一种建筑工程勘探作业用自动化作业机器人,包括底板,底板顶部四角固定连接有立杆,立杆顶部固定连接有安装板,安装板顶部两侧固定连接支撑板,两个支撑板相对的一侧开有非贯通的滑槽,滑槽内腔设有升降组件,升降组件包括电机、转盘,电机固定连接于支撑板一侧,电机输出端贯穿支撑板侧壁固定连接有主动锥齿轮,两个转盘对称转动连接于滑槽内腔顶部与底部。本发明转动转把带动升降螺杆转动,带动支撑顶板向下运动,在底板中向下滑动,带动支撑底板向下运动,支撑底板接触到地面后继续向下,直到支撑底板可以稳固地将装置支撑在地面,大大提高了装置整体稳定性,并有效减少勘探人员的劳动量。
技术研发人员:蒋武衡
受保护的技术使用者:广州科技职业技术大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!