一种带工作平台的机械臂的制作方法
本申请涉及高空作业设备,尤其涉及一种带工作平台的机械臂。
背景技术:
1、平台与臂架是桅柱式升降工作平台的两个主要结构。
2、在常见的桅柱式升降工作平台中,为了保障平台与臂架二者的连接强度,平台与臂架多焊接固定,这导致平台与臂架在运输与转运过程中不可分离,因此会造成转运困难、运输费升高等问题。
技术实现思路
1、本申请的目的是提供一种带工作平台的机械臂,既可以保障平台与臂架的连接强度,又可以实现平台与臂架的自由拆分,兼顾产品的结构强度和运输特性。
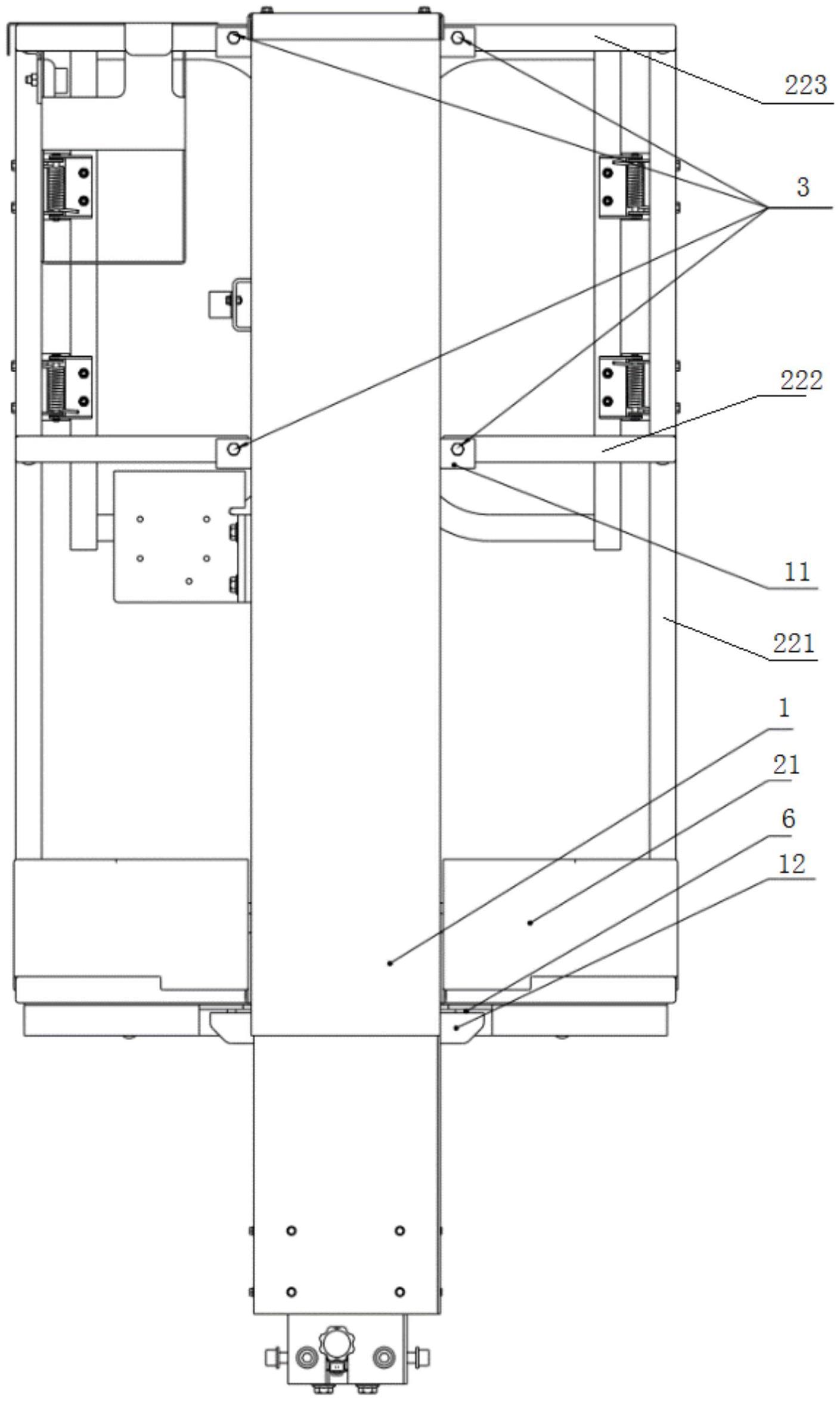
2、为实现上述目的,本申请提供一种带工作平台的机械臂,包括机械臂本体和工作平台;工作平台包括平台底板和围设于平台底板的周侧的护栏,平台底板设有安装槽,护栏设有护栏缺口,护栏缺口和安装槽处于工作平台的同侧;机械臂本体依次穿设护栏缺口和安装槽两者且与上述两者锁紧连接。
3、在一些实施例中,安装槽沿平台底板的板厚方向贯通,且朝平台底板的板体边缘敞露。
4、在一些实施例中,护栏包括立杆、第一横栏和第二横栏和,第一横栏和第二横栏均固定于立杆且沿立杆的长度方向间隔分布;第一横栏和第二横栏均具有间隔且相向的横栏杆端,护栏缺口处于全部横栏杆端之间。
5、在一些实施例中,机械臂本体设有多个托槽,全部托槽与全部横栏杆端一一对应;任一横栏杆端自上而下嵌入对应的托槽;任一横栏杆端与对应的托槽之间设有用于锁紧二者的第一紧固件。
6、在一些实施例中,工作平台还包括设于安装槽的周侧的加强板。
7、在一些实施例中,加强板包括沿平台底板的板厚方向延伸的第一凹槽护板和沿平台底板的板面方向延伸的第二凹槽护板。
8、在一些实施例中,机械臂本体设有安装座,安装座朝上托举第二凹槽护板;安装座和第二凹槽护板之间设有用于锁紧二者的第二紧固件。
9、在一些实施例中,机械臂本体包括可伸缩连接的第一伸缩臂和第二伸缩臂;第一伸缩臂的横截面尺寸大于第二伸缩臂的横截面尺寸,第一伸缩臂穿设且连接于工作平台。
10、相对于上述背景技术,本申请所提供的带工作平台的机械臂包括机械臂本体和工作平台;前述工作平台包括平台底板和围设于平台底板的周侧的护栏,其中,平台底板设有安装槽,护栏设有护栏缺口,护栏缺口和安装槽处于工作平台的同侧;前述机械臂本体依次穿设护栏缺口和安装槽两者与上述两者锁紧连接
11、在本申请所提供的带工作平台的机械臂中,机械臂本体和工作平台实现装配连接,相比于常规的焊接连接关系而言,有利于改善该带工作平台的机械臂的运输性能和维修性能。此外,在本申请所提供的带工作平台的机械臂中,工作平台设有护栏缺口和安装槽,护栏缺口和安装槽可以改善与机械臂本体的装配特性,例如增大机械臂本体和工作平台的接触面积、增加机械臂本体和工作平台的约束关系、增强机械臂本体和工作平台的连接强度、降低机械臂本体和工作平台二者为满足装配关系而对各零部件的加工精度和要求等。
12、可见,本申请所提供的带工作平台的机械臂既具有良好的运输性能和维修性能,又能够保障机械臂本体和工作平台的连接强度,提高产品寿命。
技术特征:
1.一种带工作平台的机械臂,其特征在于,包括机械臂本体(1)和工作平台(2);所述工作平台(2)包括平台底板(21)和围设于所述平台底板(21)的周侧的护栏(22),所述平台底板(21)设有安装槽(23),所述护栏(22)设有护栏缺口,所述护栏缺口和所述安装槽(23)处于所述工作平台(2)的同侧;所述机械臂本体(1)依次穿设所述护栏缺口和所述安装槽(23)两者且与上述两者锁紧连接;
2.根据权利要求1所述的带工作平台的机械臂,其特征在于,所述安装槽(23)沿所述平台底板(21)的板厚方向贯通,且朝所述平台底板(21)的板体边缘敞露。
3.根据权利要求1所述的带工作平台的机械臂,其特征在于,所述机械臂本体(1)包括可伸缩连接的第一伸缩臂和第二伸缩臂;所述第一伸缩臂的横截面尺寸大于所述第二伸缩臂的横截面尺寸,所述第一伸缩臂穿设且连接于所述工作平台(2)。
技术总结
本申请公开了一种带工作平台的机械臂,包括机械臂本体和工作平台;工作平台包括平台底板和围设于平台底板的周侧的护栏,平台底板设有安装槽,护栏设有护栏缺口,护栏缺口和安装槽处于工作平台的同侧;机械臂本体依次穿设护栏缺口和安装槽两者且与上述两者锁紧连接。该机械臂以机械臂本体和工作平台的装配关系取代了常规的焊接关系,有利于改善该机械臂的运输性能和维修性能,其中,工作平台设有可以改善其与机械臂本体的装配性能的护栏缺口和安装槽,降低了机械臂本体和工作平台的装配难度,增强机械臂本体和工作平台的连接强度,有利于该机械臂兼顾产品结构强度和运输/维护性能。
技术研发人员:刘国良,韩高峰,林胜,李会敏
受保护的技术使用者:湖南星邦智能装备股份有限公司
技术研发日:20230327
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!