一种基于视觉伺服的机器人移动轨迹控制方法及系统
本发明涉及机器人控制领域,特别涉及一种基于视觉伺服的机器人移动轨迹控制方法及系统。
背景技术:
0、技术背景
1、随着科技的进步,机器人逐步进入各行各业,尤其是在工厂中经常可以看到机器人工作的身影,通常,机器人都是按照一定的路径行走重复固定的工作,虽然利用机器代替了人工,但还需要专门的人员监督机器人的工作避免机器人与其他物品发生碰撞。现有技术中需要专门的人员监督机器人的工作,由于人力监督具有偶然性,所以容易发生机器人碰撞的现象。
2、因此,本发明提供了一种基于视觉伺服的机器人移动轨迹控制方法及系统。
技术实现思路
1、本发明一种基于视觉伺服的机器人移动轨迹控制方法及系统,利用了视觉伺服技术,多个不同机器人的工作需求进行轨迹布局,让每一个机器人按照提前设置好的路线进行移动,并且在机器人进行工作的过程中分析前方的路径是否可以通过,以及当前方的路径有障碍物时重新规划新路线,可以有效避免机器人碰撞,提高工作效率。
2、本发明提供了一种基于视觉伺服的机器人移动轨迹控制方法,包括:
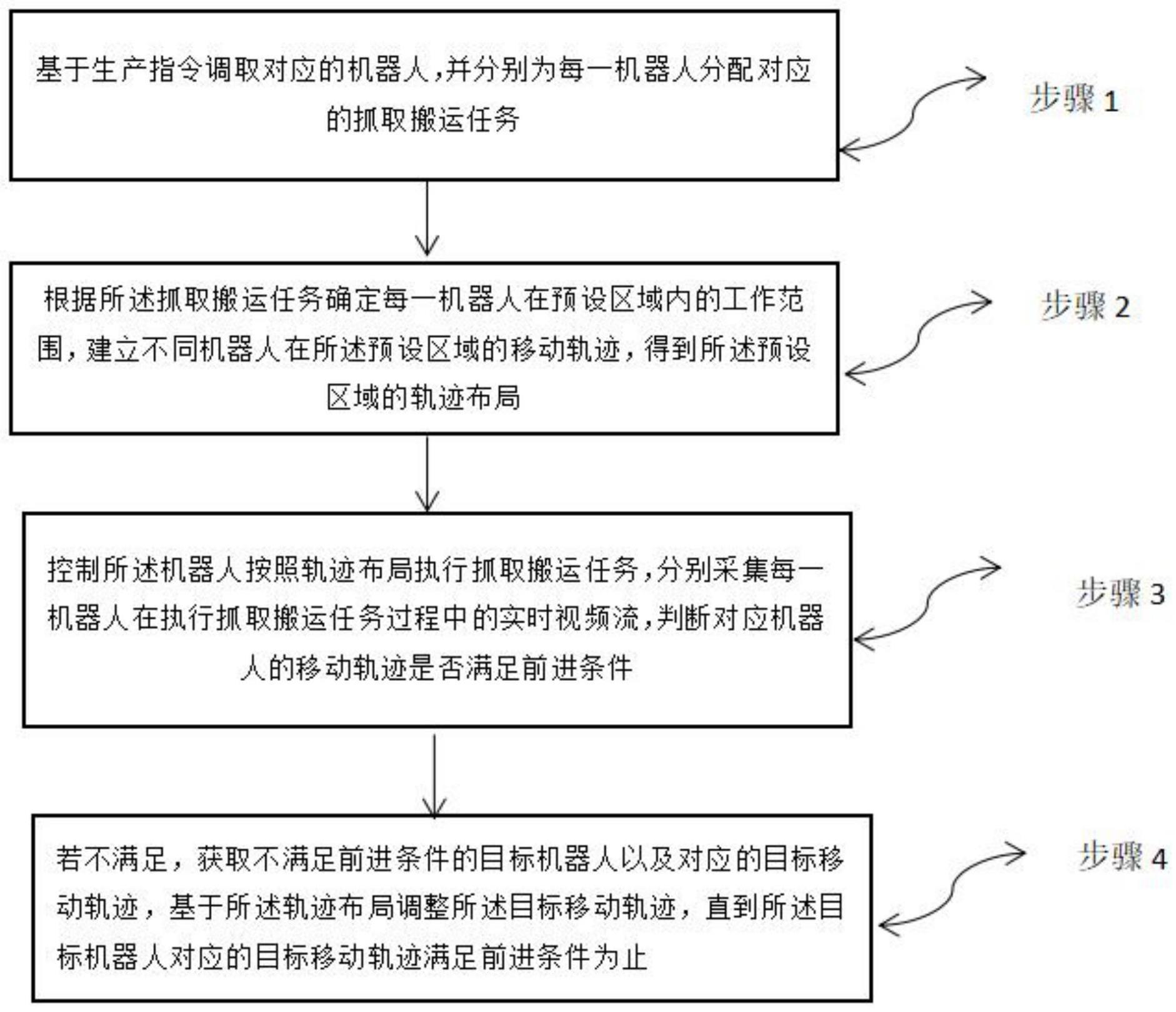
3、步骤1:基于生产指令调取对应的机器人,并分别为每一机器人分配对应的抓取搬运任务;
4、步骤2:根据所述抓取搬运任务确定每一机器人在预设区域内的工作范围,建立不同机器人在所述预设区域的移动轨迹,得到所述预设区域的轨迹布局;
5、步骤3:控制所述机器人按照轨迹布局执行抓取搬运任务,分别采集每一机器人在执行抓取搬运任务过程中的实时视频流,判断对应机器人的移动轨迹是否满足前进条件;
6、步骤4:若不满足,获取不满足前进条件的目标机器人以及对应的目标移动轨迹,基于所述轨迹布局调整所述目标移动轨迹,直到所述目标机器人对应的目标移动轨迹满足前进条件为止。
7、在一种可实施的方式中,
8、包括:
9、步骤11:获取并解析用户发出的生产指令建立生产方案;
10、步骤12:基于所述生产方案调取对应功能的机器人,并分别获取每一机器人对应的可执行任务;
11、步骤13:基于所述生产方案结合每一机器人对应的可执行任务为每一机器人分配对应的工作岗位;
12、步骤14:根据每一工作岗位对应的工作需求为对应的机器人分配抓取搬运任务。
13、在一种可实施的方式中,
14、包括:
15、步骤21:根据所述生产指令确定所述预设区域的生产流程,分别解析每一抓取搬运任务,得到得到不同抓取搬运任务之间的逻辑关系,查找每一抓取搬运任务在所述生产流程中的位置,根据不同抓取搬运任务之间的逻辑关系和每一抓取搬运任务在所述生产流程中的位置,建立生产逻辑流程;
16、步骤22:获取每一机器人对应的抓取搬运任务,结合所述生产逻辑流程建立并所述预设区域的工作模型,追踪每一机器人执行对应抓取搬运任务过程中的活动轨迹,基于所述活动轨迹确定每一机器人在所述预设区域内的工作范围;
17、步骤23:同步建立不同机器人在对应工作范围内的活动轨迹,得到同一时刻下不同活动轨迹之间的重合点,将所述重合点以标记在所述工作模型中,获取每一机器人对应的可执行任务,基于所述可执行任务确定对应机器人的可执行范围;
18、步骤24:基于所述可执行范围确定每一机器人对应的可调节范围,基于所述可调节范围分别调节每一所述重合点对应的活动轨迹,直到所述每一时刻下不同活动轨迹之间不存在重合点时生产每一所述机器人对应的移动轨迹,建立所述预设区域的轨迹布局。
19、在一种可实施的方式中,
20、包括:
21、步骤31:控制所述机器人按照所述轨迹布局执行对应的抓取搬运任务,并分别采集每一机器人在执行所述抓取搬运任务过程中的实时视频流,分别将每一所述机器人的移动轨迹映射到对应的实时视频流中,得到每一所述机器人的移动实景视频流;
22、步骤32:分别将每一移动实景视频流划分为若干个实景图像帧,得到每一所述机器人对应的图像帧集,利用交替反卷积与卷积分别对每一所述图像帧集进行增强生成对应的目标图像帧集;
23、步骤33:分别捕捉每一所述目标图像帧集中包含的图像轮廓,建立每一所述图像帧集的轮廓变化信息,基于所述轮廓变化信息将所述图像轮廓划分为变化轮廓和固定轮廓,基于每一所述变化轮廓在对应目标图像帧集中的轮廓变化信息确定所述变化轮廓的变化方向以及变化速度,得到所述变化轮廓与对应机器人的移动轨迹之间的重合率,当所述重合率不为0时,确定所述机器人的移动轨迹不满足前进条件;
24、步骤34:获取所述固定轮廓与对应移动轨迹之间的重合信息,判断所述固定轮廓是否为障碍物轮廓,若是,获取所述障碍物轮廓落入的移动轨迹,确定对应机器人的移动轨迹不满足前进条件。
25、在一种可实施的方式中,
26、利用交替反卷积与卷积分别对每一所述图像帧集进行增强,包括:
27、利用预设全卷积网络分别对每一图像帧进行识别分割得到若干个图像区域,以及每一图像区域中轮廓线与非轮廓线之间的第一对比程度;
28、利用预设循环神经网络结合反卷积与卷积建立交替反卷积与卷积模型;
29、提取第一对比程度小于预设对比程度的目标图像帧,将所述目标图像帧输入到所述交替反卷积与卷积模型中进行第一次反卷积以及进行第一次卷积,生成第一卷积图像帧;
30、提取所述第一卷积图像帧中每一图像区域中轮廓线与非轮廓线之间的第二对比程度;
31、当所述第二对比程度小于所述预设对比程度时,将所述第一卷积图像帧返回到所述交替反卷积与卷积模型中进行循环反卷积以及进行循环卷积,直到所述当前卷积图像帧中每一图像区域中轮廓线与非轮廓线之间的当前对比程度大于或等于所述预设对比程度为止,生成对应的目标图像帧集。
32、在一种可实施的方式中,
33、所述步骤4,包括:
34、步骤41:提取不满足前进条件的目标机器人以及所述目标机器人对应的目标移动轨迹,在所述轨迹布局中标记所述目标移动轨迹,以及在所述轨迹布局中标记每一所述目标机器人的位置,建立待调轨迹布局;
35、步骤42:在所述待调轨迹布局中调节每一目标移动轨迹的走向,生成若干条候补移动轨迹,获取所述目标机器人执行每一条候补移动轨迹时对应的执行时长,根据时长由低到高的顺序为每一候补移动轨迹建立第一选取权重;
36、步骤43:获取每一候补移动轨迹中包含的拐点数量,根据拐点数量由低到高的顺手为每一候补轨迹建立第二选取权重;
37、步骤44:根据所述第一选取权重和第二选取权重建立每一候补移动轨迹的综合权重,将所述综合权重由高到低进行排序,提取排序首位的第一综合权重对应的目标候补移动轨迹,利用所述目标候补移动轨迹替换对应的目标移动轨迹,控制所述目标机器人按照所述目标候补移动轨迹执行对应的抓取搬运任务。
38、在一种可实施的方式中,
39、还包括:
40、当所述机器人的移动轨迹满足前进条件时,控制所述机器人按照所述轨迹布局执行抓取搬运任务。
41、本发明一种基于视觉伺服的机器人移动轨迹控制系统,包括:
42、采集分配模块,用于基于生产指令调取对应的机器人,并分别为每一机器人分配对应的抓取搬运任务;
43、轨迹布局模块,用于根据所述抓取搬运任务确定每一机器人在预设区域内的工作范围,建立不同机器人在所述预设区域的移动轨迹,得到所述预设区域的轨迹布局;
44、轨迹控制模块,用于控制所述机器人按照轨迹布局执行抓取搬运任务,分别采集每一机器人在执行抓取搬运任务过程中的实时视频流,判断对应机器人的移动轨迹是否满足前进条件;
45、轨迹调节模块,用于若不满足,获取不满足前进条件的目标机器人以及对应的目标移动轨迹,基于所述轨迹布局调整所述目标移动轨迹,直到所述目标机器人对应的目标移动轨迹满足前进条件为止。
46、在一种可实施的方式中,
47、所述轨迹控制模块,包括:
48、第一控制单元,用于控制所述机器人按照所述轨迹布局执行对应的抓取搬运任务,并分别采集每一机器人在执行所述抓取搬运任务过程中的实时视频流,分别将每一所述机器人的移动轨迹映射到对应的实时视频流中,得到每一所述机器人的移动实景视频流;
49、第二控制单元,用于分别将每一移动实景视频流划分为若干个实景图像帧,得到每一所述机器人对应的图像帧集,利用交替反卷积与卷积分别对每一所述图像帧集进行增强生成对应的目标图像帧集;
50、第三控制单元,用于分别捕捉每一所述目标图像帧集中包含的图像轮廓,建立每一所述图像帧集的轮廓变化信息,基于所述轮廓变化信息将所述图像轮廓划分为变化轮廓和固定轮廓,基于每一所述变化轮廓在对应目标图像帧集中的轮廓变化信息确定所述变化轮廓的变化方向以及变化速度,得到所述变化轮廓与对应机器人的移动轨迹之间的重合率,当所述重合率不为0时,确定所述机器人的移动轨迹不满足前进条件;
51、第四控制单元,用于获取所述固定轮廓与对应移动轨迹之间的重合信息,判断所述固定轮廓是否为障碍物轮廓,若是,获取所述障碍物轮廓落入的移动轨迹,确定对应机器人的移动轨迹不满足前进条件。
52、在一种可实施的方式中,
53、所述第二控制单元,还用于:
54、利用预设全卷积网络分别对每一图像帧进行识别分割得到若干个图像区域,以及每一图像区域中轮廓线与非轮廓线之间的第一对比程度;
55、利用预设循环神经网络结合反卷积与卷积建立交替反卷积与卷积模型;
56、提取第一对比程度小于预设对比程度的目标图像帧,将所述目标图像帧输入到所述交替反卷积与卷积模型中进行第一次反卷积以及进行第一次卷积,生成第一卷积图像帧;
57、提取所述第一卷积图像帧中每一图像区域中轮廓线与非轮廓线之间的第二对比程度;
58、当所述第二对比程度小于所述预设对比程度时,将所述第一卷积图像帧返回到所述交替反卷积与卷积模型中进行循环反卷积以及进行循环卷积,直到所述当前卷积图像帧中每一图像区域中轮廓线与非轮廓线之间的当前对比程度大于或等于所述预设对比程度为止,生成对应的目标图像帧集。
59、本发明可以实现的有益效果为:为了节约人力成本提高监督机器人的效率,先根据生产指令调取相应的机器人,然后为每一机器人分配对应的抓取搬运任务,进而确定每一机器人在预设区域内的工作范围,为不同的机器人设置移动轨迹,从而得到预设区域的轨迹布局,然后控制机器人沿着轨迹布局进行抓取搬运任务,并在执行任务过程中采集实时视频流,当移动轨迹前方有障碍物时及时调整机器人的前进轨迹,避免机器人碰撞,利用视觉伺服技术在多个机器人同时进行工作时,可以通过提前布局的方式确定每一机器人的前进路线控制机器人的前进,机器人不仅可以完成基础的工作,而且在工作过程中根据前方的路况调整自己的前进方向,可以有效避免机器人碰撞,大大降低了机器人的损坏率。
60、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
61、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!