一种基于运动意图估计与力前馈补偿的人机协作方法
本发明属于机器人控制领域,更具体地,涉及一种基于运动意图估计与力前馈补偿的人机协作方法。
背景技术:
1、随着机器人技术的兴起,人机共融交互成为了当前机器人发展的中心,人机协作作为人机交互中的重要一环,在高端制造、医疗康复、社会服务得到了广泛的应用。如何将机器人高精度高效率重复性作业的出色表现与人类在理解、感知、决策上的优势相融合也是众多学者研究的重点。阻抗控制的提出为人机顺应性协作建立了理论基础,在阻抗控制下,机器人被动地跟随人的运动,人类伙伴需要付出更多的能量补偿机器人与物体的动力学来实现期望的运动,机器人成为了额外的负载,人类伙伴工作易疲劳。
2、如何让机器人主动地跟随人的运动轨迹、减少人的能量输入是本发明专利要实现的目标,这便产生了一个棘手的问题:如何让机器人知道人的目标位置,即如何估计人的运动意图。
技术实现思路
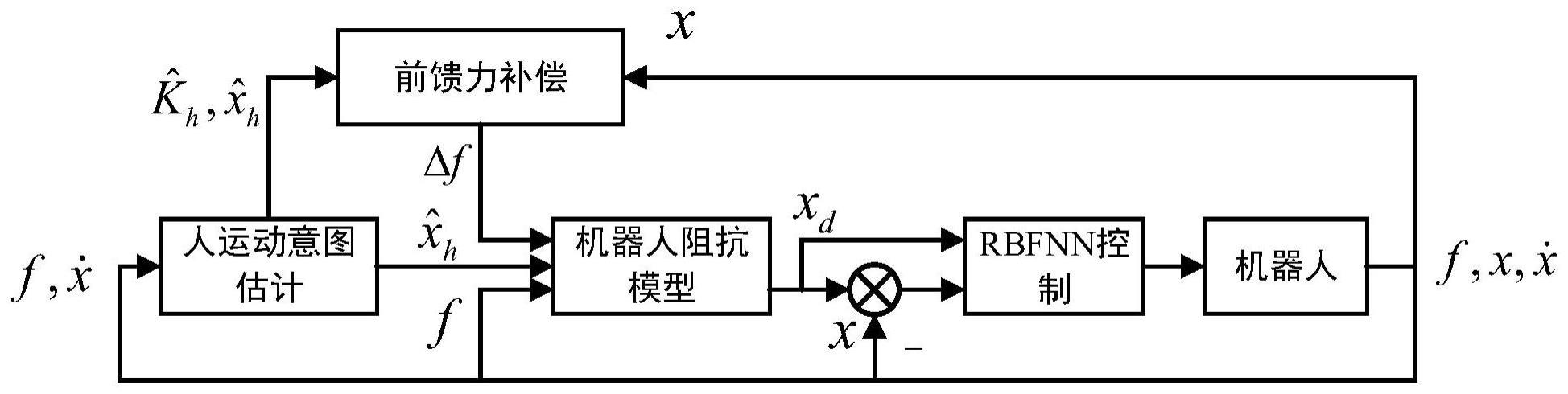
1、针对上述人机协作存在的问题,本发明提出了一种基于运动意图估计和力前馈补偿的人机协作神经阻抗控制方法,该方法可以实现高顺应性的人引导机器人协同作业。本发明主要包含四个系统:人机协作系统,人的运动意图识别系统,力前馈补偿系统,位置内环控制系统。
2、所述人机协作系统,包括协作机器人和六维力传感器,六维力传感器安装在协作机器人末端,人类伙伴通过拖拽机械臂末端的六维力传感器引导机器人协同作业,在本发明中,机械臂末端的位置、速度信息和人机交互力是可获得的。
3、所述人的运动意图识别系统,根据机械臂末端的位置、速度和交互力信息,利用极大似然估计将人的运动意图和肢体刚度估计出来,并将运动意图集成到阻抗控制中。
4、所述力前馈补偿系统,根据极大似然估计出的人的运动意图和肢体刚度,设计了力前馈补偿,并通过李雅普诺夫函数证明了对系统的稳定性,进一步减小人机交互力和位置响应波动。
5、所述位置内环控制系统,采用rbfnn进行位置内环控制,并通过李雅普诺夫函数证明了控制的稳定性,相较于传统的pid控制,位置响应更快。
6、所述的人机协作系统主要针对一种简化的人机协作场景,慢速的人机交互,人手拖动机械臂末端的力传感器,则人手当前的位置x、速度可以通过机器人编码器位置信息进一步解算获得,交互力f可以通过力传感器测得。
7、本发明获取人机协作中人的运动意图与刚度并集成到阻抗控制,根据获取的运动意图和刚度设计了力前馈补偿,采用rbfnn控制进行位置内环控制。
8、本发明为实现上述目的所采用的技术方案是:
9、一种基于运动意图估计与力前馈补偿的人机协作方法,其特征在于,包括以下步骤:
10、根据机械臂末端状态信息与交互力信息,通过运动意图识别系统将人的运动意图和肢体刚度进行估计;
11、根据估计出的人的运动意图和肢体刚度,通过力前馈补偿系统减小人机交互力和位置响应波动;
12、根据机械臂末端状态信息与交互力信息、人的运动意图和从力前馈补偿系统获取的力前馈补偿,通过机器人阻抗模型得到交互力产生的目标位置;
13、根据交互力产生的目标位置、机械臂末端状态信息中的位置,通过位置内环控制系统对机器人进行控制,实现人机协作。
14、所述根据机械臂末端状态信息,通过运动意图识别系统将人的运动意图和肢体刚度进行估计,包括以下步骤:
15、人肢体动力学模型由-kh(x-xh)=f表示,xh为人的运动意图,x为人当前的位置,kh表示人的肢体刚度,f表示交互力;
16、根据机械臂末端的位置、速度和交互力,利用极大似然估计将人的运动意图和肢体刚度估计出来,并令估计的肢体刚度并且刚度的平均值和方差由观测数据估计,运动意图位于区间并将估计出的运动意图用于机器人阻抗模型中;
17、其中,t表示一个采样周期,fi表示第i个交互力,n表示数据的个数;分别为估计人的肢体刚度的最大值和最小值。
18、所述根据估计出的人的运动意图和肢体刚度,通过力前馈补偿系统减小人机交互力和位置响应波动,包括以下步骤:
19、所述力前馈补偿系统由表示,且a=-kh,b>0,前馈力补偿的所需的变量人的意图xh、上肢刚度kh分别由估计出的人的意图和人的上肢刚度表示;
20、其中,δf表示前馈力补偿,a、b均为系数。
21、所述根据交互力产生的目标位置、机械臂末端状态信息中的位置,通过位置内环控制系统对机器人进行控制,包括以下步骤:
22、所述位置内环控制系统针对笛卡尔空间的机械臂动力学式构建控制器;
23、笛卡尔空间的机械臂动力学式如下:
24、
25、其中,分别表示人当前的位置即机械臂在笛卡尔空间下的位置、速度、加速度,为对称正定惯性矩阵,为哥氏力和离心力矩阵,为重力矩阵,表示总的控制输入,m表示机械臂的自由度数,为机器人与物体的交互力,h表示交互力的维数;
26、控制器为:
27、其中,u表示控制器输出的控制量,kv表示一个正的常数,表示神经网络的输入,即径向基函数,r表示误差函数,f表示交互力;表示对rbf神经网络权重参数w的估计值;
28、
29、t表示一个采样周期,l为正定矩阵。
30、一种基于运动意图估计与力前馈补偿的人机协作方法,通过拖拽机械臂末端的六维力传感器引导机器人协同作业。
31、一种基于运动意图估计与力前馈补偿的人机协作系统,包括:
32、运动意图识别系统,用于根据机械臂末端状态信息与交互力信息,通过运动意图识别系统将人的运动意图和肢体刚度进行估计;
33、力前馈补偿系统,用于根据估计出的人的运动意图和肢体刚度,通过力前馈补偿系统减小人机交互力和位置响应波动;
34、位置内环控制系统,用于根据交互力产生的目标位置、机械臂末端状态信息中的位置,通过位置内环控制系统对机器人进行控制,实现人机协作;其中,所述交互力产生的目标位置根据机械臂末端状态信息与交互力信息、人的运动意图和从力前馈补偿系统获取的力前馈补偿,通过机器人阻抗模型得到。
35、一种基于运动意图估计与力前馈补偿的人机协作系统,包括协作机器人和六维力传感器,所述六维力传感器安装在协作机器人末端,人通过拖拽机械臂末端的六维力传感器引导机器人协同作业。
36、一种基于运动意图估计与力前馈补偿的人机协作装置,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现所述的一种基于运动意图估计与力前馈补偿的人机协作方法。
37、一种计算机可读存储介质,所述存储介质上存储有计算机程序,当所述计算机程序被处理器执行时,实现所述的一种基于运动意图估计与力前馈补偿的人机协作方法。
38、本发明具有以下有益效果及优点:
39、在人机协作中,本发明方法可以使机器人更好的适应人类伙伴,估计人的意图用于减轻人的能量消耗、减轻人的交互力,前馈力补偿用于减小交互力和位置跟踪波动,rbf神经网络用于提高位置响应速度。
- 还没有人留言评论。精彩留言会获得点赞!