一种适用于丝印行业的并联机械手的制作方法
本发明属于瓶式容器的外表面丝印加工领域,尤其是涉及一种适用于丝印行业的并联机械手。
背景技术:
1、在丝印行业,瓶式容器在烧制时是立放姿态,而丝印加工时需要将瓶子放倒,在瓶身侧面印刷。因此需要对瓶子进行平放和立放转换。为此需要两道工序分别完成瓶子的翻转和转运,存在着占地面积大,机构效率慢的问题。而且在不同瓶型的丝印加工时,机构只能对特定的瓶型进行夹取和翻转,兼容性很差。
技术实现思路
1、有鉴于此,本发明旨在克服现有技术中的缺陷,提出一种适用于丝印行业的并联机械手,替代原有的翻转和转运机构,减少设备的占用面积。由于并联机械手可以在转运的过程中完成翻转的动作,也起到了提高整条流水线的运行效率的作用。并联机械手末端夹爪的开合角度及夹取位置可根据现场生产情况进行调节,提高了整条流水线的兼容性。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种适用于丝印行业的并联机械手,包括机器人固定盘和设置在其下方的夹爪主体,机器人固定盘与夹爪主体之间设置有协同运动的夹取机构和第一运动机构实现夹爪主体的夹取动作,机器人固定盘与夹爪主体之间设置有协同运动的翻转机构和第二运动机构实现夹爪主体的夹取动作;
4、第一运动机构包括设置在机器人固定盘上的第一运动电机和第一传动组件,第二运动结构包括设置在机器人固定盘上的第二运动电机和第二传动组件;
5、夹取机构包括设置在机器人固定盘上的夹取电机和夹取连杆组件,翻转机构包括设置在机器人固定盘上的翻转电机和翻转连杆组件。
6、进一步的,第一传动组件包括相互铰接的第一大臂和第一小臂,第一大臂的一端与第一运动电机的输出轴连接,另一端与第一小臂铰接,第一小臂的一端与第一大臂铰接,另一端与夹爪主体铰接。
7、进一步的,夹取连杆组件包括依次铰接的夹取辅助臂连杆、第一大臂辅助臂、第一小臂辅助臂、夹取连杆,夹取辅助臂连杆一端与夹取电机的输出轴连接,另一端与第一大臂辅助臂连接,第一大臂辅助臂与第一小臂辅助臂之间设置有第一直角弯,第一直角弯与第一大臂和第一小臂之间的铰接轴连接。
8、进一步的,第二传动组件包括相互铰接的第二大臂和第二小臂,第二大臂的一端与第二运动电机的输出轴连接,另一端与第二小臂铰接,第二小臂的一端与第二大臂铰接,另一端与夹爪主体铰接。
9、进一步的,翻转连杆组件包括依次铰接的翻转辅助臂连杆、第二大臂辅助臂、第二小臂辅助臂、翻转连杆,翻转辅助臂连杆一端与翻转电机的输出轴连接,另一端与大臂辅助臂连接,第二大臂辅助臂与第二小臂辅助臂之间设置有第二直角弯,第二直角弯与第二大臂和第二小臂之间的铰接轴连接。
10、进一步的,夹爪主体内设置有翻转中轴,翻转中轴依次将翻转连杆、第一小臂的末端、第二小臂的末端和夹取连杆连接,其中,翻转连杆与翻转中轴同步运动,夹取连杆通过轴承与翻转中轴连接。
11、进一步的,夹爪主体包括底座和与底座转动连接的左侧夹爪和右侧夹爪,其中:
12、左侧夹爪包括夹爪主动臂和设置在其端部的左侧爪件,夹爪主动臂靠近爪件的一端与底座转动连接,另一端连接有连接柱,连接柱一端与夹爪主动臂铰接,另一端与夹取连杆铰接,底座上设置有限位轴,夹爪主动臂的中部设置有与限位轴相配合的圆弧槽;
13、右侧夹爪包括夹爪从动臂和设置在其端部的右侧爪件,夹爪从动臂的一端与底座转动连接,另一端设置有与限位轴相配合的圆弧槽。
14、进一步的,左侧爪件设置有第一爪件和第二爪件,右侧爪件设置有第三爪件和第四爪件,其中,第一爪件和第三爪件设置在底座的前侧,第二爪件和第四爪件设置在底座的后侧,第二爪件上设置有正向齿轮,第四爪件上设置有与正向齿轮相啮合的反向齿轮,正向齿轮和反向齿轮均与底座转动连接。
15、进一步的,连接柱为鱼眼轴承连接柱。
16、进一步的,夹爪主动臂、夹爪从动臂、正向齿轮和反向齿轮均通过夹爪旋转轴与底座转动连接。
17、相对于现有技术,本发明具有以下优势:
18、(1)由于送料机和丝印机结构紧凑,原有翻转和夹取机构需要额外占用空间,降低空间利用率,而本发明的并联机械手采用吊装的方式固定在送料机与丝印机之间,并不单独占用空间,有效提高产线空间利用率。
19、(2)传统的翻转转运结构互相独立依次工作,而本发明的并联机械手将翻转和转运结构进行整合,通过两个不同的电机驱动同时工作,在转运的过程中便可完成翻转动作。节省了一半的时间,提高了整体运行效率。
技术特征:
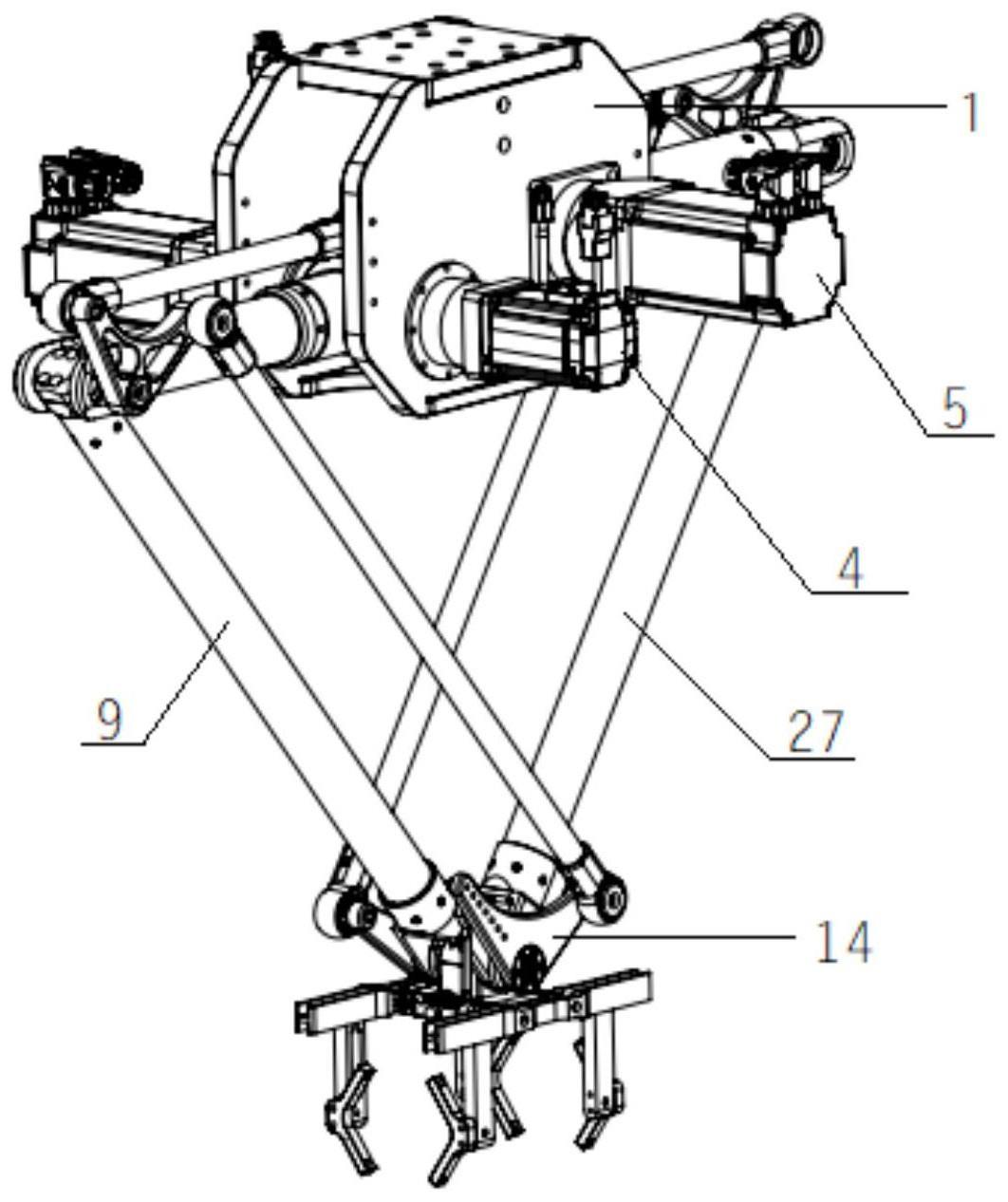
1.一种适用于丝印行业的并联机械手,其特征在于:包括机器人固定盘(1)和设置在其下方的夹爪主体(24),机器人固定盘(1)与夹爪主体(24)之间设置有协同运动的夹取机构和第一运动机构实现夹爪主体(24)的夹取动作,机器人固定盘(1)与夹爪主体(24)之间设置有协同运动的翻转机构和第二运动机构实现夹爪主体(24)的夹取动作;
2.根据权利要求1所述的一种适用于丝印行业的并联机械手,其特征在于:第一传动组件包括相互铰接的第一大臂(8)和第一小臂(9),第一大臂(8)的一端与第一运动电机(3)的输出轴连接,另一端与第一小臂(9)铰接,第一小臂(9)的一端与第一大臂(8)铰接,另一端与夹爪主体(24)铰接。
3.根据权利要求2所述的一种适用于丝印行业的并联机械手,其特征在于:夹取连杆(14)组件包括依次铰接的夹取辅助臂连杆(7)、第一大臂辅助臂(10)、第一小臂辅助臂(12)、夹取连杆(14),夹取辅助臂连杆(7)一端与夹取电机(4)的输出轴连接,另一端与第一大臂辅助臂(10)连接,第一大臂辅助臂(10)与第一小臂辅助臂(12)之间设置有第一直角弯(11),第一直角弯(11)与第一大臂(8)和第一小臂(9)之间的铰接轴连接。
4.根据权利要求3所述的一种适用于丝印行业的并联机械手,其特征在于:第二传动组件包括相互铰接的第二大臂(26)和第二小臂(27),第二大臂(26)的一端与第二运动电机(5)的输出轴连接,另一端与第二小臂(27)铰接,第二小臂(27)的一端与第二大臂(26)铰接,另一端与夹爪主体(24)铰接。
5.根据权利要求4所述的一种适用于丝印行业的并联机械手,其特征在于:翻转连杆(13)组件包括依次铰接的翻转辅助臂连杆(6)、第二大臂辅助臂(28)、第二小臂辅助臂(30)、翻转连杆(13),翻转辅助臂连杆(6)一端与翻转电机(2)的输出轴连接,另一端与第二大臂辅助臂(28)连接,第二大臂辅助臂(28)与第二小臂辅助臂(30)之间设置有第二直角弯(29),第二直角弯(29)与第二大臂(26)和第二小臂(27)之间的铰接轴连接。
6.根据权利要求5所述的一种适用于丝印行业的并联机械手,其特征在于:夹爪主体(24)内设置有翻转中轴(23),翻转中轴(23)依次将翻转连杆(13)、第一小臂(9)的末端、第二小臂(27)的末端和夹取连杆(14)连接,其中,翻转连杆(13)与翻转中轴(23)同步运动,夹取连杆(14)通过轴承与翻转中轴(23)连接。
7.根据权利要求1所述的一种适用于丝印行业的并联机械手,其特征在于:夹爪主体(24)包括底座(214)和与底座(214)转动连接的左侧夹爪(19)和右侧夹爪(20),其中:
8.根据权利要求7所述的一种适用于丝印行业的并联机械手,其特征在于:左侧爪件设置有第一爪件(191)和第二爪件(192),右侧爪件设置有第三爪件(201)和第四爪件(202),其中,第一爪件(191)和第三爪件(201)设置在底座(214)的前侧,第二爪件(192)和第四爪件(202)设置在底座(214)的后侧,第二爪件(192)上设置有正向齿轮(21),第四爪件(202)上设置有与正向齿轮(21)相啮合的反向齿轮(22),正向齿轮(21)和反向齿轮(22)均与底座(214)转动连接。
9.根据权利要求7所述的一种适用于丝印行业的并联机械手,其特征在于:连接柱为鱼眼轴承连接柱(15)。
10.根据权利要求8所述的一种适用于丝印行业的并联机械手,其特征在于:夹爪主动臂(16)、夹爪从动臂(17)、正向齿轮(21)和反向齿轮(22)均通过夹爪旋转轴(25)与底座(214)转动连接。
技术总结
本发明提供了一种适用于丝印行业的并联机械手,包括机器人固定盘和设置在其下方的夹爪主体,机器人固定盘与夹爪主体之间设置有协同运动的夹取机构和第一运动机构实现夹爪主体的夹取动作,机器人固定盘与夹爪主体之间设置有协同运动的翻转机构和第二运动机构实现夹爪主体的夹取动作;第一运动机构包括第一运动电机和第一传动组件,第二运动结构包括第二运动电机和第二传动组件;夹取机构包括夹取电机和夹取连杆组件,翻转机构包括翻转电机和翻转连杆组件。本发明所述的并联机械手可根据不同瓶子的形状大小进行调节,能适应多种样式、材料的瓶子的夹取和翻转动作。
技术研发人员:王岳超
受保护的技术使用者:勃肯特(镇江)机器人技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!