一种无轨式园区巡查机器人及其工作方法与流程
本发明属于巡查机器人,特别涉及一种无轨式园区巡查机器人及其工作方法。
背景技术:
1、目前物业安保智能巡检解决方案中,巡查机器人的发展得到了广泛的普及,然而在巡查机器人中,根据室内、室外和轨道不同的使用场景设计出了符合人员需求的巡查机器人,并广泛运用在住宅、办公园区、景区、商场、工厂、学校、医院和机场等场所,有效提升安保质量,改善管理效率,降低运营成本,实现园区数智化升级。
2、经检索,现有技术中,中国专利申请号cn202123205381.1申请日:2021-12-20,公开了一种智慧园区用安全巡查装置,包括巡查机器人,所述巡查机器人的正四棱台的壳体四侧端上均设置有与壳体端面斜度相同的容纳槽,四组所述容纳槽内均设置与其相同斜度的可为巡查机器人提供电能的太阳能发电板,所述壳体的内腔安装有方型的安装板且安装板的内腔设置有四组分别与相对应的太阳能发电板转动连接的调节件,所述壳体的内腔轴心处设置有可带动四组调节件同时运动的驱动件。本技术所述的一种智慧园区用安全巡查装置,利用太阳能发电板提高其续航能力,通过驱动件和调节件的配合,可调节太阳能发电板的倾斜角度以取得最高的发电效率,进一步提高续航能力,且太阳能发电板收纳入容纳槽中,减小占用空间。
3、但该设备仍存在以下缺陷:虽然能够通过驱动件和调节件的配合,可调节太阳能发电板的倾斜角度以取得最高的发电效率,但园区天气变化较为复杂,在极端的恶劣天气不利于园区机器人的使用,当出现暴雪天气时,外出的车辆在进入地下车库时,容易造成积雪覆盖车牌的情况,导致车辆无法进入,给园区内的服务人员带来了不便。
技术实现思路
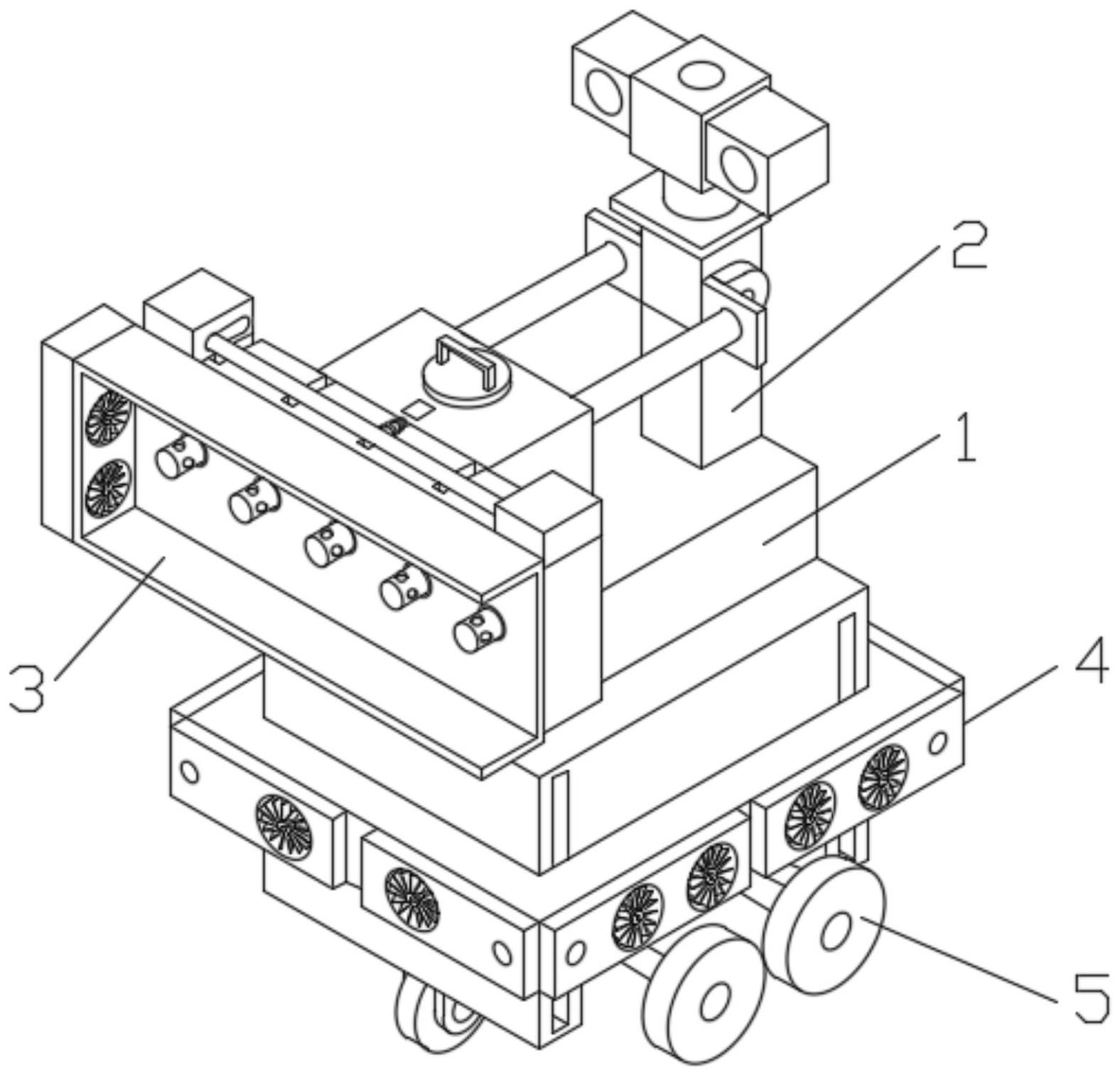
1、针对上述问题,本发明提供了一种无轨式园区巡查机器人,包括第一驱动组件、第二驱动组件、清洁臂组件、第一移动组件和第二移动组件;所述第一驱动组件的顶部一侧与第二驱动组件的底部固定连接,所述清洁臂组件的一端与第二驱动组件的输出端传动连接,且所述清洁臂组件的底部与第一驱动组件的顶部活动贴合,所述第一移动组件滑动贴合连接在第一驱动组件的外壁,且所述第一驱动组件与第一移动组件传动连接,所述第二移动组件传动连接在第一驱动组件的底部,且所述第一移动组件套接安装在第二移动组件的外部。
2、进一步的,所述第一驱动组件包括第一壳体;所述第一壳体的底部开设有收纳槽,且所述第一壳体的截面为凹字形结构,所述第一壳体的外壁开设有两组导向槽,且两组所述导向槽以收纳槽的中轴线为中心呈对称设置,所述第一壳体的顶部设置有控制单元壳体。
3、进一步的,所述第二驱动组件包括第二壳体;所述第二壳体的顶部活动贴合连接有第三壳体,且所述第三壳体与第二壳体为拼接而成的矩形结构,所述第三壳体的外壁开设有两组第一通孔,且两组所述第一通孔均与第三壳体的内壁相互连通,所述第三壳体的顶部固定连接有旋转式摄像头,所述第二壳体的内壁底端固定连接有第一电动推杆,且所述第一电动推杆的输出端与第三壳体的底部传动连接,所述第三壳体的顶部固定连接有第一电机,且所述第一电机嵌入安装在旋转式摄像头的底部,所述第一电机的输出端延伸至第三壳体的内部,且所述第一电机的输出端传动连接有丝杆,所述丝杆螺纹连接有齿条,所述齿条的一侧壁活动贴合连接在第三壳体的内壁,且所述齿条的另一侧外壁位于靠近第一通孔的一侧。
4、进一步的,所述清洁臂组件包括联动机构和输出机构;所述联动机构的一侧壁与输出机构固定连接,且所述输出机构与联动机构呈同一水平设置,所述联动机构的端部且远离输出机构的一侧转动连接在第一通孔内。
5、进一步的,所述联动机构包括第四壳体;所述第四壳体的底部呈倾斜面设置,且所述第四壳体的外壁且靠近倾斜面的一侧嵌入安装有微型水泵,所述微型水泵的输出端固定且连通有输水管,所述输水管的端部且远离微型水泵的一侧呈密封状,所述输水管的外壁且远离微型水泵的一侧开设有出水孔,所述出水孔延伸至第四壳体的外壁一侧,所述第四壳体的顶部螺纹连接有加料盖,所述第四壳体的外壁且远离微型水泵的一侧固定连接有两组第二电动推杆,两组所述第二电动推杆以第四壳体的中轴线为中心呈对称设置,两组所述第二电动推杆的输出端均传动连接有限位板,两组所述限位板均转动连接在第一通孔内,两组所述限位板之间固定连接有齿轮,且所述齿轮与齿条啮合连接。
6、进一步的,所述输出机构包括车牌框壳体和喷洒部;所述车牌框壳体为开放式结构,且所述车牌框壳体的一端固定连接有气泵,所述气泵的输出端延伸至车牌框壳体内,所述车牌框壳体的一侧壁开设有若干组第二通孔,所述车牌框壳体的外壁且靠近第二通孔的一侧固定连接有导向板,所述导向板的顶部开设有若干组空心滑腔,所述导向板的顶部固定连接有两组微动开关,两组所述微动开关之间与喷洒部的两端传动连接,且所述喷洒部活动贴合连接在空心滑腔和第二通孔的内壁。
7、进一步的,所述喷洒部包括第一导流管;所述第一导流管的一侧壁固定且连通有伸缩管,且所述伸缩管与出水孔固定连接,所述第一导流管的两端为封闭式结构,且所述第一导流管的两端均与微动开关传动连接,所述第一导流管的底部固定且连通有若干组第二导流管,且若干组所述微动开关滑动贴合连接在空心滑腔内,若干组所述第二导流管的底端固定且连通有喷洒管,若干组所述喷洒管贯穿第二通孔且延伸至车牌框壳体内,若干组所述喷洒管的端部且远离第二导流管的一侧开设有若干组溢流孔。
8、进一步的,所述第一移动组件包括漂浮块;所述漂浮块为矩形结构,且所述漂浮块的表面开设有装配槽,所述装配槽活动贴合连接在第一壳体的外壁,所述装配槽的内壁固定连接有第一联动杆和第二联动杆,且所述第一联动杆和第二联动杆以漂浮块的中轴线为中心呈对称设置,所述第一联动杆活动贴合连接在一组导向槽的内壁,所述第二联动杆活动贴合连接在另一组导向槽的内壁,所述第二联动杆上螺纹连接有螺纹杆,且所述螺纹杆的顶部传动连接有第二电机的输出端,所述第二电机嵌入安装在第一壳体上,所述漂浮块的外壁两侧且靠近拐角处嵌入安装有第三电机,所述第三电机的输出端传动连接有第一防护板,且所述第一防护板活动贴合连接在漂浮块的外壁,所述第一防护板的表面且远离第三电机的一侧嵌入安装有第一螺旋桨,所述漂浮块的外壁另外两侧且靠近拐角处嵌入安装有第四电机,所述第四电机的输出端传动连接有第二防护板,且所述第二防护板活动贴合连接在漂浮块的外壁,所述第二防护板的表面且远离第四电机的一侧嵌入安装有第二螺旋桨。
9、进一步的,所述第二移动组件包括第一装配板和第二装配板;所述第一装配板的一端嵌入安装有第五电机,且所述第五电机的输出端传动连接有方向轮,所述第二装配板垂直设置在第一装配板的底部,且所述第二装配板位于远离方向轮的一侧,所述第一装配板和第二装配板之间固定连接有两组第三电动推杆,且两组所述第三电动推杆以第二装配板的中轴线为中心呈对称设置,两组所述第三电动推杆的输出端均贯穿第一装配板,且两组所述第三电动推杆的输出端固定连接在收纳槽的内壁顶端,所述第二装配板的底部固定连接有两组双轴电机,且两组所述双轴电机的输出端均传动连接有行走轮。
10、一种无轨式园区巡查机器人的工作方法,包括以下步骤,
11、通过第二移动组件用于带动巡查机器人在陆地环境下使用;
12、通过第二移动组件收纳在第一驱动组件底部,再利用第一驱动组件带动第一移动组件下移,使巡查机器人在水面环境下使用;
13、通过第二驱动组件带动清洁臂组件,使清洁臂组件在冬季下雪的天气,对进入停车场的车辆车牌进行清洁的作用。
14、本发明的有益效果是:
15、1、通过第二移动组件用于带动巡查机器人在陆地环境下使用,通过第二移动组件收纳在第一驱动组件底部,再利用第一驱动组件带动第一移动组件下移,使巡查机器人在水面环境下使用,通过第二驱动组件带动清洁臂组件,使清洁臂组件在冬季下雪的天气,对进入停车场的车辆车牌进行清洁的作用,提高了车牌的清洁效果,降低了园区内服务人员的劳动强度。
16、2、通过车牌框壳体活动套接在车辆车牌的外部,并启动气泵,使气泵产生的高压气体吹拂在车牌框壳体内,对车牌上的积雪进行清洁的作用,并配合微动开关带动第一导流管移动,使若干组喷洒管往复移动在第二通孔的内壁,用于切换若干组喷洒管的工作状态,提高了对车牌积雪的清洁效率。
17、3、通过若干组喷洒管延伸至车牌框壳体内时,利用伸缩管将出水孔内的盐水进行收集,并通过第一导流管、第二导流管和喷洒管再由溢流孔向外喷洒,使盐水均匀喷洒在车牌框壳体内的不同位置,用于将车牌上堆积的积雪进行深度清洁的作用,能够有效的对结冰后的车牌进行快速清洁。
18、4、通过第二电机带动螺纹杆旋转,使螺纹连接在第二联动杆移动至螺纹杆不同位置的同时,将漂浮块同步移动至第一壳体的底部周围,用于使第一壳体能够漂浮在水面的作用,使园区巡查机器人在积水路面或者地下室积水环境下也能够进行巡查探测的目的,提高了巡查机器人在多环境下使用的兼容性。
19、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!