信息处理装置和方法、机器人系统、物品制造方法和介质与流程
本公开涉及信息处理。更具体而言,本公开涉及信息处理装置、信息处理方法、机器人系统、使用机器人系统的物品制造方法、程序和记录介质。
背景技术:
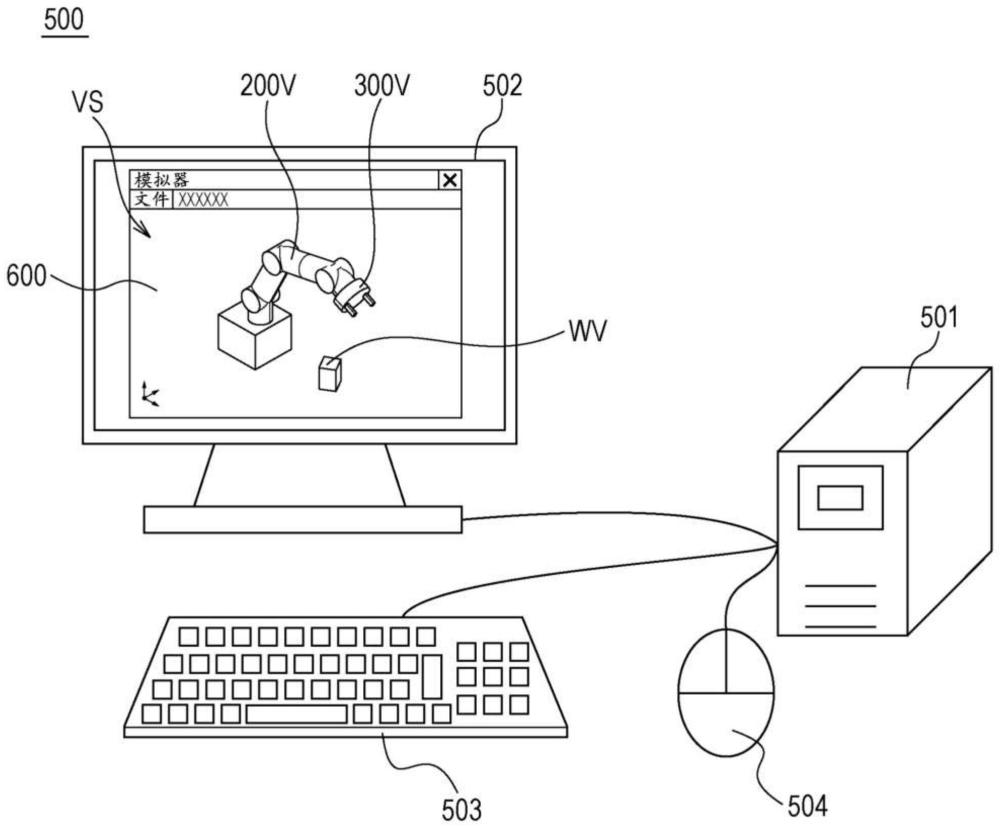
1、迄今为止,在用于机器人的操作的设定作业(也称为示教(teach)作业)中,使用能够在不使用机器人的真实机器的情况下预先检查机器人的操作的机器人模拟器。设定作业的示例包括设定作为机器人的末端执行器(end effector)部分的代表点的工具中心点(下文中称为tcp)、创建作为tcp的移动目的地的坐标的示教点、然后创建用于使机器人通过使用tcp和示教点来进行操作的程序的作业。在这种机器人模拟器中,将机器人和周围环境的模型布置在虚拟空间中,并且通过例如移动机器人的模型(tcp)和周围环境的模型来执行模拟,从而示教机器人的操作。存在作为供用户移动机器人的模型和周围环境的模型的设备的操作手柄(operating handle)(操作部)的功能。日本专利特许公开no.2014-161921描述了分别在机器人的轴和tcp的位置处显示操作手柄的功能。
技术实现思路
1、根据本公开的实施例,信息处理装置通过使用虚拟模型来执行模拟。信息处理装置包括处理单元。处理单元被配置成在显示单元上显示虚拟模型和操作部,该操作部被用户用来操作虚拟模型,并且响应于用户的输入来改变关于操作部的设定信息。
2、通过以下参考附图对实施例的描述,本公开的进一步的特征将变得清楚。
技术特征:
1.一种通过使用虚拟模型来执行模拟的信息处理装置,其特征在于,该信息处理装置包括处理单元,其中,
2.根据权利要求1所述的信息处理装置,其中,
3.根据权利要求1所述的信息处理装置,其中,
4.根据权利要求3所述的信息处理装置,其中,
5.根据权利要求1所述的信息处理装置,其中,
6.根据权利要求1所述的信息处理装置,其中,
7.根据权利要求1所述的信息处理装置,其中,
8.根据权利要求1所述的信息处理装置,其中,
9.根据权利要求1所述的信息处理装置,其中,
10.根据权利要求1所述的信息处理装置,其中,
11.根据权利要求10所述的信息处理装置,其中,
12.根据权利要求11所述的信息处理装置,其中,
13.根据权利要求12所述的信息处理装置,其中,
14.根据权利要求10所述的信息处理装置,其中,
15.根据权利要求1所述的信息处理装置,其中,
16.根据权利要求10所述的信息处理装置,其中,
17.根据权利要求10所述的信息处理装置,其中,
18.根据权利要求1所述的信息处理装置,其中,
19.根据权利要求18所述的信息处理装置,其中,
20.根据权利要求18所述的信息处理装置,其中,
21.根据权利要求1所述的信息处理装置,其中,
22.一种机器人系统,其特征在于,包括由根据权利要求1至21中的任一项所述的信息处理装置来设定其操作的机器人。
23.一种通过使用根据权利要求22所述的机器人系统来制造物品的方法。
24.一种通过使用虚拟模型来执行模拟的信息处理方法,其特征在于,该信息处理方法包括:
25.一种信息处理装置,其特征在于,用于操作设备并且在拍摄设备的画面上通过增强现实显示虚拟模型,该信息处理装置包括处理单元,其中,
26.根据权利要求25所述的信息处理装置,其中,
27.一种信息处理方法,其特征在于,该方法操作设备并且在拍摄设备的画面上通过增强现实显示虚拟模型,该信息处理方法包括:
28.一种非暂态计算机可读记录介质,其特征在于,存储有能够执行根据权利要求24或27所述的信息处理方法的程序。
技术总结
公开了信息处理装置和方法、机器人系统、物品制造方法和介质。信息处理装置通过使用虚拟模型来执行模拟。信息处理装置包括处理单元。处理单元被配置成在显示单元上显示虚拟模型和操作部,该操作部被用户用来操作虚拟模型,并且响应于用户的输入来改变关于操作部的设定信息。
技术研发人员:菅谷聪,佐佐木裕宣
受保护的技术使用者:佳能株式会社
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!