一种投料炒菜机器人的制作方法
本发明属于炒菜机器人,具体为一种投料炒菜机器人。
背景技术:
1、炒菜机器人,首先要将复杂的菜肴烹饪工艺与动作进行分解与定义,并用机器人专业与烹饪专业均能理解的语言进行描述;在此基础上,找出菜肴烹饪的核心工艺与核心动作;之后设计机器人运动系统,包括锅具动作机构、送料机构、火控机构、出料机构等;机器人自动炒菜机实现了炒菜过程的自动化,烹饪过程不粘不糊不溢、而且安全、节能、无油烟。炒菜过程中,锅体自动密封保鲜、菜肴营养美味正宗。
2、申请号:cn202210432795.8公开了一种“机械臂”,其背景技术叙述了“在工程实践中,机械长臂、超长机械臂的设计一直是工程设计中的一个难点,这类机械臂不仅需要在长度上能够满足作业需求,同时还需要考虑机械臂的安装、运输及其存放场地要求。目前现有结构中,例如日本superdargon超长机械臂。这种机械臂由基座与手臂两大部分组成,该机械手臂有多节,每一节具有臂桶与关节;节与节、节与基座由关节相连。然而该机械手臂不方便收纳运输以及布置,其关节部分铰链最大活动角度为-90°至90°,同时其每节臂杆直线排列,无法折叠”;
3、但是依旧存在以下缺陷:
4、1、需要逐个折叠才能进行收纳,这样整个收纳过程缓慢;
5、2、折叠的方式导致机械臂依旧完全暴露在外,在受到物体挤压撞击,就容易全部产生损坏。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种投料炒菜机器人,有效的解决了目前市场上的投料炒菜机器人机械臂折叠收纳速度慢、整体全部暴露在外部易损坏的问题。
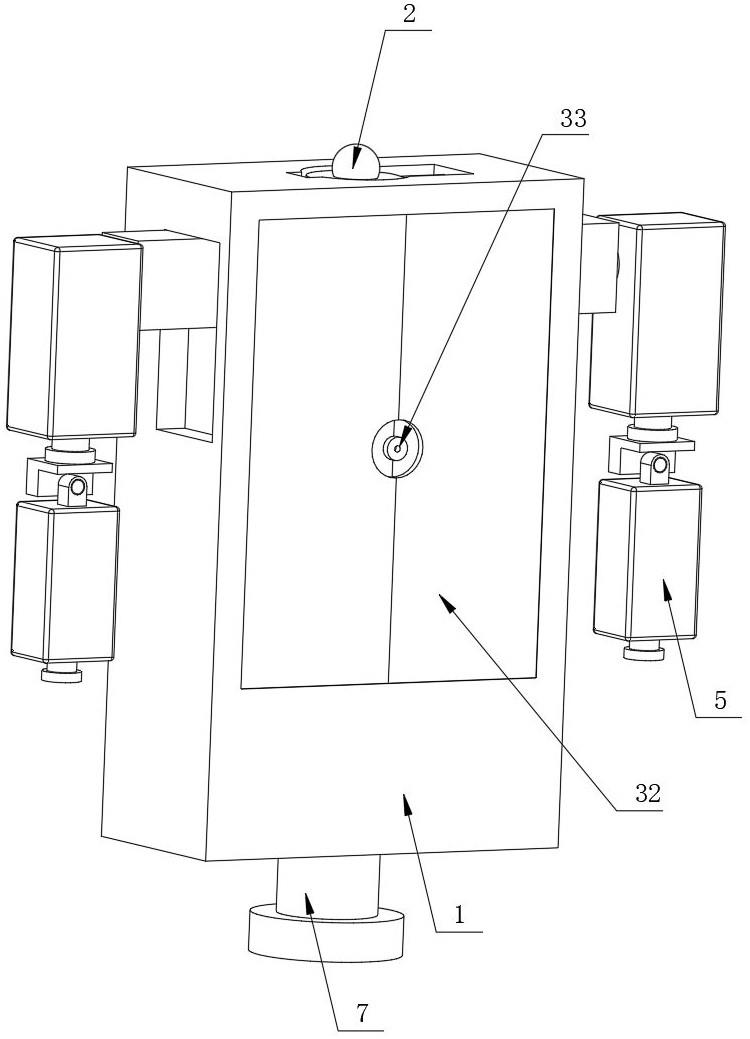
2、为实现上述目的,本发明提供如下技术方案:一种投料炒菜机器人,包括机器人主体、用于支撑旋转升降的支撑座,所述机器人主体的底部与支撑座顶部相安装,所述机器人主体的内腔安装有距离控制用调节组件,所述调节组件的两端安装有用于夹持炒菜工具的机械臂组件,所述机器人主体的内部开设有存放用收纳仓;
3、机械臂组件包括安装在调节组件上的安装盒,所述安装盒的内腔安装有传输电机,所述传输电机延伸至安装盒外部的输出端安装有收纳盒,所述收纳盒的内腔安装有第一推杆电机,所述第一推杆电机的输出端安装有多级可回收机械关节组件。
4、上述技术方案实现了:
5、通过上述部件的配合,可实现机械臂组件的快捷收纳,进而方便炒菜机器人的运输工作,并且提高了机械臂组件收缩后的防护强度,还能进行整体长度调整,提高机械臂组件的适用范围。
6、优选的,所述机器人主体的底部设置有回收仓,且回收仓内腔的顶部与支撑座的顶部直接安装,所述机器人主体外部棱角处呈弧形设计,且整体呈矩形设置;
7、上述技术方案实现了:
8、支撑座可通过伸缩功能整体进入回收仓内部,这样就避免了支撑座突出在机器人主体外部,影响炒菜机器人的便捷运输,同时由于机器人主体棱角边缘处均做了弧形设计,这样就不会因为棱角戳坏物体,因为整体呈矩形设置,这样在摆放时就不会占据较大空间,使得运输时车辆的运输空间能得到合理利用。
9、优选的,所述调节组件包括安装在机器人主体内部的支撑架,所述支撑架的侧壁内腔安装有控制电机,所述控制电机的输出端通过轴承安装有丝杆,所述支撑架内壁顶部开设有限位用滑动槽,所述丝杆的一端螺纹连接有两个顶部延伸至滑动槽内腔的活动架,且活动架的外部与安装盒的外部相安装;
10、上述技术方案实现了:
11、调节组件可带动机械臂组件进行伸缩运动,进而扩大了机械臂组件的使用宽度,同时也方便了机械臂组件的回收。
12、优选的,所述机器人主体的两侧均开设有一个回收口,所述回收口的长度值大于收纳盒的长度值;
13、上述技术方案实现了:
14、回收口可对收纳盒进行回收至机器人主体内部,进而方便机械臂组件的运输工作。
15、优选的,所述收纳仓内腔安装有存放除油污清洁液的储液盒,所述储液盒的内腔安装有吸液管,所述吸液管延伸至储液盒外部的一端安装有液体传输用泵体,所述储液盒的顶部表面螺纹连接有封闭盖,所述泵体的输出端安装有传输管,所述传输管的内腔设置有第一电动阀门,所述传输管的顶部安装有呈三头设置的雾化喷头;
16、上述技术方案实现了:
17、利用上述部件的配合可将去除油污的液体喷洒至机械臂组件及摄像头表面,进而实现对机械臂组件及摄像头表面去油污清洁工作。
18、优选的,所述收纳仓的内腔底部一侧安装有限位框,所述限位框的内壁开设有多个限位槽,所述限位槽的内腔顶部与底部均安装有定位架,所述定位架的内腔安装有滚珠,所述限位槽的内腔活动安装有齿轮环,所述齿轮环的内壁安装有清洁毛刷,所述齿轮环的外侧啮合有驱动齿轮,所述驱动齿轮的中部安装有防水电机;
19、上述技术方案实现了:
20、通过上述部件的配合,可以更好的对机械臂组件进行清洁,同时也起到对机械臂组件进行擦干作用。
21、优选的,所述收纳仓内腔底部安装有蓄水盒,所述蓄水盒的内部安装有输送管,且输送管延伸至蓄水盒外部的一端与泵体底部输出端上的吸液管一端相安装,所述输送管的内腔安装有第二电动阀门,所述蓄水盒的顶部螺纹连接有注水塞;
22、上述技术方案实现了:
23、利用上述部件的配合,可对摄像头与机械臂组件上进行液体清洗,保证了摄像头与机械臂组件表面洁净度。
24、优选的,所述机器人主体的外部开设有排污口,所述排污口的内腔螺纹连接有密封块,所述机器人主体的表面通过合页安装有封闭门,所述封闭门的外部凹槽处安装有门锁;
25、上述技术方案实现了:
26、利用排污口可实现污水的有效导出,同时打开封闭门口,可对机器人主体内部收纳仓进行开启,进而进行检修清洁等工作。
27、优选的,所述机器人主体的顶部位置安装有一个旋转用转向机构,所述转向机构的顶部安装有用于监控的摄像头,所述机器人主体的内部安装有照明用led灯;
28、上述技术方案实现了:
29、利用摄像头可实现对炒菜机器人进行炒菜监控,保证炒菜过程的安全记录,还能对机器人主体内部进行监控。
30、优选的,所述转向机构包括开设在机器人主体顶部的圆形孔,所述圆形孔的中部通过轴承安装有可旋转的转向杆,所述转向杆通过轴承的一端安装有驱动电机,所述转向杆外部的一端安装有与圆形孔内壁相契合的圆形承载板,所述圆形孔的内壁开设有圆形卡位槽,所述承载板的外壁粘合有与卡位槽内腔相匹配的卡位条;
31、上述技术方案实现了:
32、利用转向组件可将摄像头在机器人主体外部进行位置调整,从而实现在不同环境下有效利用摄像头。
33、与现有技术相比,本发明的有益效果是:
34、在工作中,通过机械臂组件可实现逐级或同步收缩运动,这样就可实现快速收纳以及不会在放置时产生阻碍,并且通过该收纳方式,仅收纳盒暴露在外,其余部件均位于收纳盒内部,能够有效增强整体抗压力,不易损坏;
35、通过调节组件可将机械臂组件移动至机器人主体内部,这样就完全规避了机器臂暴露在外的状况,并且通过机器人主体外部部件的全部收缩,使得整个炒菜机器人暴露在外的仅机器人主体,这样就能在运输时进行便捷的叠加放置,空间占据小,运输效率高,且运输过程中不易产生零部件损坏;
36、通过摄像头可对炒菜机器人的炒菜过程进行更加清晰的摄像监控,保证整个炒菜过程中的安全记录;
37、通过转向机构将摄像头移动至机器人主体内部,可以实现保护摄像头的功能,当开启led灯后,配合摄像头还能起到监测机器人主体内部情况的功能;
38、通过雾化喷头喷射清洁液体至摄像头及机械臂组件上,就可实现去油污清洁的功能,保证了炒菜机器人使用的美观性,同时封闭式的自动清洁也避免了污水溅射,整体清洁效率高。
- 还没有人留言评论。精彩留言会获得点赞!