适应空间在轨精细操作的多功能旋拧装置和旋拧方法
本发明属于空间在轨服务,涉及一种空间在轨维护维修的操作工具,具体是指适应空间在轨精细操作的多功能旋拧装置和旋拧方法。
背景技术:
1、空间在轨服务技术是当今世界各国竞相竞争的高地,也是衡量一个国家综合国力的重要标志。空间操控是空间在轨服务技术的重要能力,因其能代替人类完成空间站的组装、装配与维护维修、轨道垃圾清理、太空资产维护,以及抓捕、释放、回收卫星等高度复杂的任务,所以对其技术的研究与开发一直是航天科技强国关注的热点。
2、空间操控任务中,对目标的复杂精细操作能力要求非常高。因此,开发精细操作能力是空间操控的关键。作为精细操作的典型代表,旋拧任务是必不可少的。开发通用的可适应精细操作的多功能旋拧工具技术已然迫在眉睫,是未来提升在轨操控和在轨服务技术的核心能力。
技术实现思路
1、本发明为了解决在空间操控任务中,实现捕获的同时,如何传递扭矩,实现旋拧任务的问题;进而提供一种适应空间在轨精细操作的多功能旋拧装置和旋拧方法。
2、本发明为解决上述技术问题采用的技术方案是:
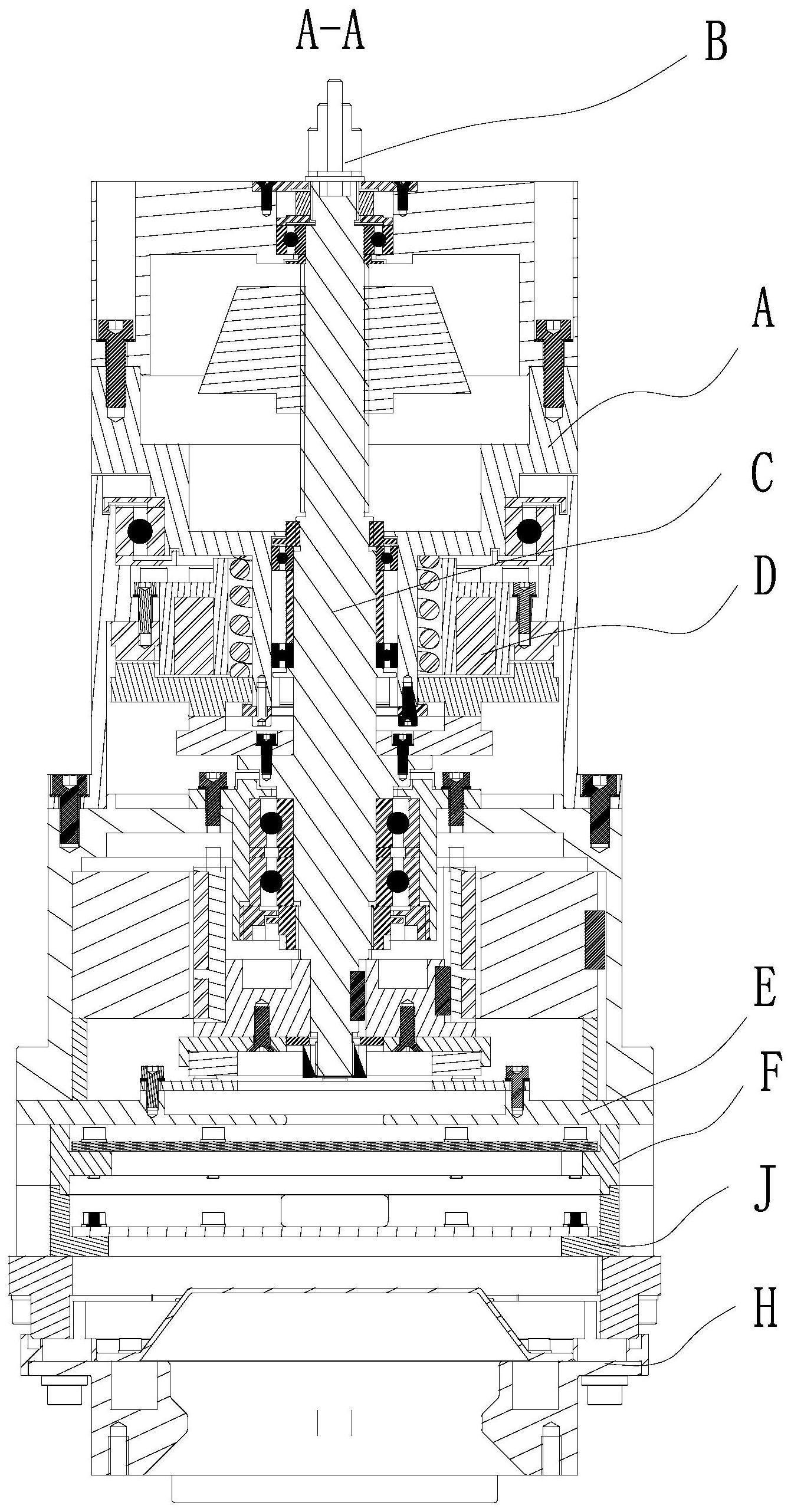
3、适应空间在轨精细操作的多功能旋拧装置,包括旋转支撑外壳、夹爪机构、驱动与传动机构和离合器机构;
4、所述的旋转支撑外壳包括由上至下同轴依次连接的夹爪支撑壳体、阶梯法兰、离合器支撑壳体和轴系支撑壳体;所述的夹爪支撑壳体与阶梯法兰固定连接;所述的阶梯法兰部分插在离合器支撑壳体内并与离合器支撑壳体转动连接,所述的离合器支撑壳体和轴系支撑壳体固定连接;
5、所述夹爪机构的爪端处于夹爪支撑壳体的上方,夹爪机构的动力输入端处于阶梯法兰与夹爪支撑壳体所形成的容置腔内;
6、所述驱动与传动机构包括电机、旋转轴和动力输出件,所述的电机安装在轴系支撑壳体内,所述旋转轴的底端与电机的动力输出端固定连接,并转动安装在轴系支撑壳体上,所述旋转轴的上端依次穿过离合器支撑壳体和阶梯法兰并转动安装在夹爪支撑壳体上;所述的动力输出件安装在旋转轴上,并与夹爪组件的动力输入端连接,驱动夹爪组件实现张开或闭合动作;
7、所述的离合器机构为环形结构,并安装在阶梯法兰与离合器支撑壳体所形成的环形安装槽内;离合器机构包括离合器壳体、离合器线圈、压缩弹簧、离合器固定摩擦盘、离合器转动摩擦盘、制动器转动摩擦盘和限位法兰盘;所述离合器壳体的下环面开有一圈凹槽,离合器线圈处于凹槽内;所述的离合器壳体和离合器转动摩擦盘由上至下依次套在阶梯法兰的下段上,离合器壳体与阶梯法兰之间形成一个环形槽,所述的压缩弹簧套在阶梯法兰上并处于环形槽内,压缩弹簧的一端抵接在阶梯法兰的台阶面上,压缩弹簧的另一端抵接在离合器转动摩擦盘上;所述的离合器转动摩擦盘与阶梯法兰的外环壁之间为键连接并可轴向移动,所述的限位法兰盘套在旋转轴上,并与阶梯法兰的底端面固定连接,用于离合器转动摩擦盘上下移动的限位;所述的制动器转动摩擦盘套装在旋转轴上,并与旋转轴的轴肩固定连接;所述的离合器固定摩擦盘套装在离合器壳体上,并固定安装在离合器支撑壳体内环壁的轴肩上;离合器固定摩擦盘的下环面和离合器转动摩擦盘上环面的接触面分别为摩擦面,通过二者摩擦面的接触实现制动;所述离合器转动摩擦盘的下环面与制动器转动摩擦盘上环面的接触面分别为摩擦面,通过二者摩擦面的接触实现制动。
8、优选地,所述的夹爪机构包括多个夹爪组件,多个所述的夹爪组件周向均匀设置,并径向滑动连接在夹爪支撑壳体上。
9、优选地,所述的夹爪支撑壳体上周向开有若干个贯穿于上下表面的滑槽ⅰ,每个滑槽ⅰ的滑动方向与夹爪支撑壳体的径向方向保持一致,且每个滑槽ⅰ内滑动连接一个夹爪组件。
10、优选地,每个夹爪组件包括一个夹爪、一个夹爪滑动底座和夹爪驱动底座,所述的夹爪固定安装在夹爪滑动底座上,并处于夹爪支撑壳体的上方;所述的夹爪滑动底座滑动连接在夹爪支撑壳体的滑槽ⅰ内;所述的夹爪驱动底座为楔形,夹爪驱动底座的楔形面为被驱动面,夹爪驱动底座的顶端面与夹爪滑动底座的下端面固定连接,并处于阶梯法兰与夹爪支撑壳体所形成的容置腔内;
11、所述的驱动与传动机构为丝杠螺母副,旋转轴为丝杠轴,动力输出件为圆台形的丝杠螺母,所述的丝杠螺母螺接在丝杠轴上,丝杠螺母的外壁上周向开有若干个滑槽ⅱ,滑槽ⅱ的滑动方向与丝杠螺母的坡面方向相同;所述的夹爪驱动底座处于滑槽ⅱ内,并与丝杠螺母滑动连接。
12、优选地,所述的动力输出件为圆环形的驱动盘,驱动盘的上环面开有螺纹,且驱动盘的内环壁与旋转轴采用键连接;
13、每个夹爪组件包括一个夹爪和一个夹爪滑动底座,所述的夹爪固定安装在夹爪滑动底座的上表面处,并处于夹爪支撑壳体的上方;所述的夹爪滑动底座滑动连接在夹爪支撑壳体的滑槽ⅰ内,夹爪滑动底座的下表面开有螺纹,并与驱动盘上表面的螺纹相咬合,实现夹爪滑动底座沿着夹爪支撑壳体径向方向的移动。
14、优选地,所述驱动盘的上环面上开有一个同心的环形安装槽;
15、所述夹爪支撑壳体的下表面同轴设置一个安装套筒,安装套筒插在驱动盘的环形安装槽内,并与环形安装槽转动连接。
16、优选地,所述离合器转动摩擦盘的上环面同轴设置有一圈环形凸起ⅰ,环形凸起ⅰ与离合器固定摩擦盘相对设置,且环形凸起ⅰ的上端面为摩擦面;离合器转动摩擦盘的下环面同轴设置有一圈环形凸起ⅱ,环形凸起ⅱ的下端面为摩擦面;
17、所述制动器转动摩擦盘的上环面同轴设置有一圈环形凸起ⅲ,环形凸起ⅲ与环形凸起ⅱ相对设置,且环形凸起ⅲ的上端面为摩擦面。
18、优选地,所述的电机为直流无刷电机,直流无刷电机包括电机转子轴、电机转子磁钢固定法兰、电机转子磁钢、电机定子线圈和电机轴向挡环;所述的电机转子轴、电机转子磁钢固定法兰、电机转子磁钢和电机定子线圈由内至外依次设置,所述的电机转子轴与电机转子磁钢固定法兰键连接,所述的电机转子磁钢通过胶粘的方式与电机转子磁钢固定法兰固连;所述的电机定子线圈通过电机轴向挡环轴向支撑在轴系支撑壳体内,并与轴系支撑壳体的内环壁键连接;所述旋转轴的底端与电机转子轴键连接。
19、优选地,所述的旋拧装置还包括传感器、控制器、驱动器和机械臂接口;所述的传感器、控制器、驱动器和机械臂接口同轴依次安装,并通过传感器固定连接在旋转支撑外壳的底部;
20、所述的传感器包括由上至下依次设置的磁环固定板、磁环、角位置传感器处理电路板和角位置传感器固定支架;所述的磁环固定板固定连接在电机转子轴的下端面上,磁环固定在磁环固定板上,角位置传感器处理电路板与角位置传感器固定支架固定连接,角位置传感器固定支架安装在轴系支撑壳体的下端口处并将轴系支撑壳体的下端口密封;
21、所述的控制器包括控制板支架和控制板,所述的控制板支架固定安装在角位置传感器固定支架的下表面处,控制板与控制板支架固定连接;
22、所述的驱动器包括驱动板和驱动板支架,所述的驱动板支架固定安装在控制板支架的下表面处,驱动板固定安装在驱动板支架上;
23、所述的机械臂接口包括由上至下依次设置的基座法兰、防护盖和更换接口,以及绝缘垫和电连接器;所述的基座法兰安装在驱动板支架的下表面处,防护盖设置在基座法兰的下方,且二者之间的边缘处留有缝隙,并通过绝缘垫进行密封;所述的更换接口安装在防护盖上,电连接器安装在更换接口的一侧。
24、适应空间在轨精细操作的多功能旋拧方法,具体操作过程如下:
25、s1,空间目标捕获阶段:
26、离合器机构中的离合器线圈通电,产生的电磁吸合力将离合器转动摩擦盘吸合,从而使得离合器转动摩擦盘在电磁吸合力的作用下,沿着阶梯法兰的轴线方向并克服压缩弹簧的弹力向上移动,离合器固定摩擦盘的摩擦面与离合器转动摩擦盘的摩擦面贴合并产生一定的压力,离合器转动摩擦盘保持固定不动,此时压缩弹簧处于压缩状态并存储一定的预紧力;驱动与传动机构中的电机提供动力,旋转轴绕自身的中轴线进行旋转,由于制动器转动摩擦盘和离合器转动摩擦盘的摩擦面脱离,仅制动器转动摩擦盘随旋转轴一起做旋转运动,夹爪机构在周向上和轴向上是固定不动的,动力输出件在旋转轴的带动下对夹爪机构的动力输入端产生作用力,使得爪端所形成的抓捕口径逐渐减小,进而实现夹爪机构对空间目标的抓取。
27、s2,空间目标的旋拧阶段:
28、离合器机构中的离合器线圈断电,电磁吸合力消失,离合器转动摩擦盘在压缩弹簧的预紧力作用下沿着阶梯法兰的轴线方向向下移动,离合器转动摩擦盘的摩擦面和制动器转动摩擦盘的摩擦面贴合并产生一定的压力;驱动与传动机构中的直流无刷电机提供动力,旋转轴绕自身的中轴线进行旋转,制动器转动摩擦盘随旋转轴一起做旋转运动,离合器转动摩擦盘在制动器转动摩擦盘摩擦力的作用下,带动阶梯法兰一起做旋转运动,阶梯法兰将旋转的扭矩依次传递给夹爪支撑壳体和夹爪机构,夹爪机构随着旋转轴一起做旋转运动,由于夹爪机构与驱动与传动机构中的动力输出件一起做同步的旋转运动,故动力输出件不会对夹爪机构的动力输入端产生驱动力,夹爪机构的抓捕口径不会发生改变;夹爪机构的旋转实现对操作目标的旋拧。
29、s3,空间目标释放阶段:
30、离合器机构中的离合器线圈通电,产生的电磁吸合力将离合器转动摩擦盘吸合,从而使得离合器转动摩擦盘在电磁吸合力的作用下,沿着阶梯法兰的轴线方向并克服压缩弹簧的弹力向上移动,离合器固定摩擦盘的摩擦面与离合器转动摩擦盘的摩擦面贴合并产生一定的压力,离合器转动摩擦盘保持固定不动,此时压缩弹簧处于压缩状态并存储一定的预紧力;驱动与传动机构中的电机提供动力,旋转轴绕自身的中轴线进行反向旋转,由于制动器转动摩擦盘和离合器转动摩擦盘的摩擦面脱离,仅制动器转动摩擦盘随旋转轴一起做反向旋转运动,夹爪机构在周向上和轴向上是固定不动的,动力输出件在旋转轴的带动下对夹爪机构的动力输入端产生作用力,使得爪端所形成的抓捕口径逐渐增加,进而实现夹爪机构对空间目标的释放。
31、本发明与现有技术相比产生的有益效果是:
32、1、本技术在旋转支撑外壳、夹爪机构、驱动与传动机构和离合器机构的协同作用下实现了对空间目标的捕获、旋拧与释放动作,完成空间操作任务。
33、2、本技术对空间目标的捕获、旋拧与释放动作,仅通过一个直流无刷电机完成,减小了装置的整体体积与重量;同时本技术采用体积与质量较小的离合器机构,利用电磁离合器的吸合力,使得离合器转动摩擦盘具备上下移动的自由度,并利用离合器转动摩擦盘与离合器固定摩擦盘之间的摩擦力和与制动器转动摩擦盘之间的摩擦力,使得夹爪机构中的夹爪完成了平面移动以及旋转两个自由度的动作;整个装置具备自由度少、功耗低和控制简单的效果。
34、3、本技术的驱动与传动机构采用梯形丝杠螺母传动或者驱动盘与夹爪滑动底座之间的螺纹传动,可以实现自锁,无需额外的制动器组件,重量小,可靠性高。
35、4、本技术采用了模块化机电接口,具备和空间机器人或空间机械臂的对接能力,具备在轨更换的能力,极大地拓展了在轨精细操作的应用范围。
- 还没有人留言评论。精彩留言会获得点赞!