一种机械臂固定系统及其工作方法与流程
本发明属于机器人,具体涉及一种机械臂固定系统及其工作方法。
背景技术:
1、雕刻:在雕塑中,把木材、石材或其他材料切割或雕刻成预期的形状的过程皆可称之为雕刻。服务于这一目的的工具有刀、凿子、铲子、圆锥、扁斧和锤子。最常见的雕刻方法是一只手拿着凿子,另一只手拿锤子,然后用锤子将凿子敲入木头或石头中。一个雕刻完成的作品可以被称为雕刻,但雕塑一词通常被用来指具有严肃艺术意涵或美学意涵的作品。尽管一些金属加工技术例如焊接和装配,在过去的一个世纪中逐渐变得重要,但是雕刻和制模仍是两种主要的雕塑技法。
2、焊接:也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。焊接通过下列三种途径达成接合的目的:1、熔焊:加热欲接合之工件使之局部熔化形成熔池,熔池冷却凝固后便接合,必要时可加入熔填物辅助,它是适合各种金属和合金的焊接加工,不需压力。2、压焊:焊接过程必须对焊件施加压力,属于各种金属材料和部分金属材料的加工。3、钎焊:采用比母材熔点低的金属材料做钎料,利用液态钎料润湿母材,填充接头间隙,并与母材互相扩散实现链接焊件。适合于各种材料的焊接加工,也适合于不同金属或异类材料的焊接加工。现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。
3、现有技术存在以下问题:
4、1)技术工人进行雕刻或焊接工作时需要将目标物体进行固定,但是现有技术中往往采用人工安设固定架或支撑架的固定方式,人力成本投入大,工人工作量大,并且这种方式容易发生安全事故,安全性低;
5、2)现有技术中的机械臂系统功能性差,自动化程度差,存在很大的误差,其对目标的识别定位的精确性差,固定工作的效率低下,无法满足工业化需求。
技术实现思路
1、为了解决现有技术存在的人工固定方式人力成本投入大、工人工作量大以及安全性低,机械臂系统功能性差、自动化程度差、精确性差以及效率低下的问题,本发明目的在于提供一种机械臂固定系统及其工作方法。
2、本发明所采用的技术方案为:
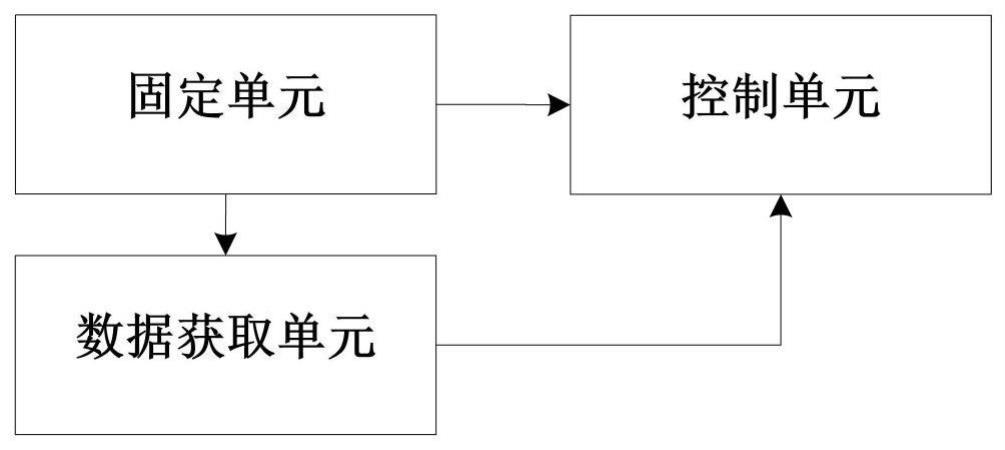
3、一种机械臂固定系统,包括固定单元、数据获取单元以及控制单元,固定单元和数据获取单元均与控制单元通信连接,固定单元与数据获取单元通信连接;
4、固定单元,用于根据控制单元发送的固定控制信号选取固定工作对目标物体进行固定;
5、数据获取单元,用于获取固定单元的工作数据和目标物体的扫描数据,并将工作数据和扫描数据发送至控制单元;
6、控制单元,用于对接收的工作数据和扫描数据进行分析和处理,根据不同的固定模式生成对应的固定控制信号并将固定控制信号发送至固定单元。
7、进一步地,控制单元包括控制后台和控制终端,控制后台和控制终端均分别与移动工作台和固定单元通信连接,控制终端与控制后台通信连接。
8、进一步地,固定单元至少包括一个固定机器人,所有的固定机器人均与控制单元通信连接;
9、每个固定机器人包括固定机器人底座、固定机器人移动模块、固定主控模块、固定机器人通讯模块、机械臂模块以及固定工具模块,固定主控模块分别与数据获取单元、固定机器人移动模块、固定机器人通讯模块、机械臂模块以及固定工具模块通信连接,且固定主控模块设置于固定机器人底座的内部,机械臂模块设置于固定机器人底座的顶端,固定机器人移动模块设置于固定机器人底座的底端,固定工具模块设置于机械臂模块的末端,固定机器人通讯模块与控制单元通信连接。
10、进一步地,固定机器人移动模块包括固定机器人驱动电机、固定机器人转向控制器、固定机器人万向轮组以及固定机器人定向轮组,所述固定机器人定向轮组设置于固定机器人底座的底端一侧,固定机器人驱动电机与固定机器人定向轮组连接,固定机器人万向轮组设置于固定机器人底座的底端另一侧,固定机器人转向控制器与固定机器人万向轮组连接,且固定机器人转向控制器与固定机器人主控模块通信连接;
11、机械臂模块包括若干机械臂伺服电机和若干机械臂部分,若干机械臂部分依次连接,位于首端的机械臂部分与固定机器人底座的顶端连接,且机械臂部分与固定机器人底座的顶端的连接处设置有一个机械臂伺服电机,其余的若干机械臂伺服电机一一对应的设置于相邻的机械臂部分连接的关节处,且所有的伺服电机均与固定主控模块通信连接;
12、固定工具模块包括工具转换轴、固定工具驱动电机以及若干固定工具,工具转换轴和固定工具驱动电机分别与固定主控模块通信连接,且工具转换轴设置于机械臂模块的末端,固定工具驱动电机设置于工具转换轴的末端,且固定工具驱动电机分别与若干固定工具连接,若干固定工具均匀的环绕工具转换轴的侧面设置,固定工具包括爪形固定器、镊形固定器、钳形固定器以及环形固定器。
13、进一步地,数据获取单元包括至少一个视觉模块、至少一个三维扫描模块以及至少一个传感器模块,每个视觉模块、每个三维扫描模块以及每个传感器模块一一对应的设置于每个固定机器人处,且每个视觉模块、每个三维扫描模块以及每个传感器模块均与对应的固定机器人的固定机器人主控模块通信连接。
14、进一步地,每个视觉模块包括识别摄像头、运动摄像头以及第一测距传感器,识别摄像头、运动摄像头以及第一测距传感器均与固定机器人主控模块通信连接,且识别摄像头设置于固定机器人的一侧,运动摄像头和第一测距传感器均设置于固定工具模块处;
15、每个三维扫描模块包括升降电机、升降导轨以及三维扫描器,升降电机和三维扫描器均与固定机器人主控模块通信连接,三维扫描器通过升降电机设置于升降导轨处,且三维扫描器设置于固定机器人底座的顶端,支撑底座的顶端设置有与升降导轨和三维扫描器相配合的凹槽,升降导轨可伸缩的垂直设置于凹槽的内部;
16、每个传感器模块包括温度传感器、烟雾传感器、位移传感器、位置传感器、压力传感器以及若干第二测距传感器,温度传感器、烟雾传感器、位移传感器、位置传感器、压力传感器以及若干第二测距传感器均与固定机器人主控模块通信连接,若干第二测距传感器均匀的设置于固定机器人底座的侧面,压力传感器设置于固定工具模块处。
17、进一步地,机械臂固定系统还包括移动工作台,移动工作台与控制单元通信连接;
18、移动工作台包括工作台底座、工作台通讯模块、工作台移动模块、工作台主控模块以及可升降攀爬架模块,工作台主控模块分别与工作台通讯模块、工作台移动模块和可升降攀爬架模块通信连接,且工作台主控模块设置于工作台底座的内部,工作台移动模块设置于工作台底座的底端,可升降攀爬架模块设置于工作台底座的顶端,工作台通讯模块与控制单元通信连接。
19、进一步地,工作台移动模块包括工作台驱动电机、工作台转向控制器、工作台万向轮组以及工作台定向轮组,所述工作台定向轮组设置于工作台底座的底端一侧,工作台驱动电机与工作台定向轮组连接,工作台万向轮组设置于工作台底座的底端另一侧,工作台转向控制器与工作台万向轮组连接,且工作台转向控制器与工作台主控模块通信连接;
20、可升降攀爬架模块包括若干升降驱动电机、若干滑轨以及若干攀爬架部分,若干攀爬架部分依次滑动连接,位于首端的攀爬架部分与工作台底座的顶端连接,且攀爬架部分与工作台底座的顶端的连接处设置有一个升降驱动电机,若干滑轨一一对应的设置于相邻的攀爬架部分的连接处,其余的若干升降驱动电机一一对应的设置于相邻的攀爬架部分的连接处,且所有的升降驱动电机均与工作台主控模块通信连接。
21、一种机械臂固定系统的工作方法,基于机械臂固定系统,机械臂固定系统包括移动工作台、固定单元、数据获取单元以及控制单元,工作方法包括如下步骤:
22、固定机器人获取目标物体的位置数据,所有的固定机器人根据位置数据移动至目标物体的四周;
23、数据获取单元获取固定单元的工作数据和目标物体的扫描数据,并将工作数据和扫描数据发送至控制单元;
24、控制单元根据工作数据、扫描数据以及当前的固定模式生成对应的固定控制信号,并将固定控制信号发送至所有的固定机器人;
25、所有的固定机器人根据接收到的固定控制信号进行固定工作。
26、进一步地,固定模式包括自动固定模式和手动固定模式,固定控制信号包括自动固定控制信号和手动固定控制信号;
27、自动固定模式,所有的固定机器人根据控制后台发送的自动固定控制信号进行固定工作;
28、手动固定模式,所有的固定机器人根据控制终端发送的手动固定控制信号进行固定工作。
29、本发明的有益效果为:
30、1)本发明提供一种自动化程度高的机械臂固定系统,采用了系统化、智能化的固定系统,避免了人工固定导致的工人工作量大和容易发生安全事故的问题,降低了人力成本投入的同时,数据获取单元实时获取固定机器人的各项数据以及目标物体的扫描数据,减小了固定定位的误差,提高了固定定位的精确性。
31、2)本发明提供一种机械臂固定系统的工作方法,采用自动固定模式和手动固定模式相结合的方式进行固定工作,提高了技术工人进行雕刻或焊机工作的效率,满足了工业化生产的需求。
32、本发明的其他有益效果将在具体实施方式中进一步进行说明。
- 还没有人留言评论。精彩留言会获得点赞!