一种工业自动钻孔机器人的制作方法
本发明涉及一种钻孔机器人,具体为一种工业自动钻孔机器人,属于工业机器人。
背景技术:
1、爆破技术为矿山开采、城市拆旧做出了重要贡献,爆破之前的炸药安装一般用机器人代替人工,现有技术中爆破机器人安装的机械臂往往不能灵活进行转动,从而无法对周边建筑进行全方位钻孔;且机械臂无法灵活对其伸出的高度和长度进行调节,影响使用效果。
2、现公开了专利号为:cn217967693u的一种爆破用钻孔机器人的旋转式机械臂,包括机壳,所述机壳的内部设有蜗杆,所述蜗杆两端且位于机壳的外壁上均固定设有轴承,所述蜗杆与轴承转动安装,所述蜗杆的一侧设有转动轴,所述转动轴与机壳转动安装,所述转动轴上且位于机壳的内部固定设有涡轮,所述蜗杆与涡轮啮合连接,所述机壳的外壁上固定设有第一电机,所述第一电机输出端与蜗杆固定安装,所述转动轴的上端穿过机壳,且固定设有旋转盘,使用者可以通过打开第一电机使其带动蜗杆进行转动,由于蜗杆与涡轮啮合安装,因此涡轮也会进行转动,由此可实现对转动轴和旋转盘进行转动的效果。
3、上述方案存在诸多益处,但也存在以下缺陷:
4、1、对于机械臂调节存在局限,无法多个角度调整钻头的角度;
5、2、对于钻头设备安装固定不够便捷,无法匹配不同型号的钻机设备,并且针对钻机外部的形状往往凹凸不平,无法使安装稳定;
6、3、对于钻机钻孔的角度调节后,需要不断给进钻孔深度,往往在给进过程往往会存在偏移,进而造成出现钻孔误差。
技术实现思路
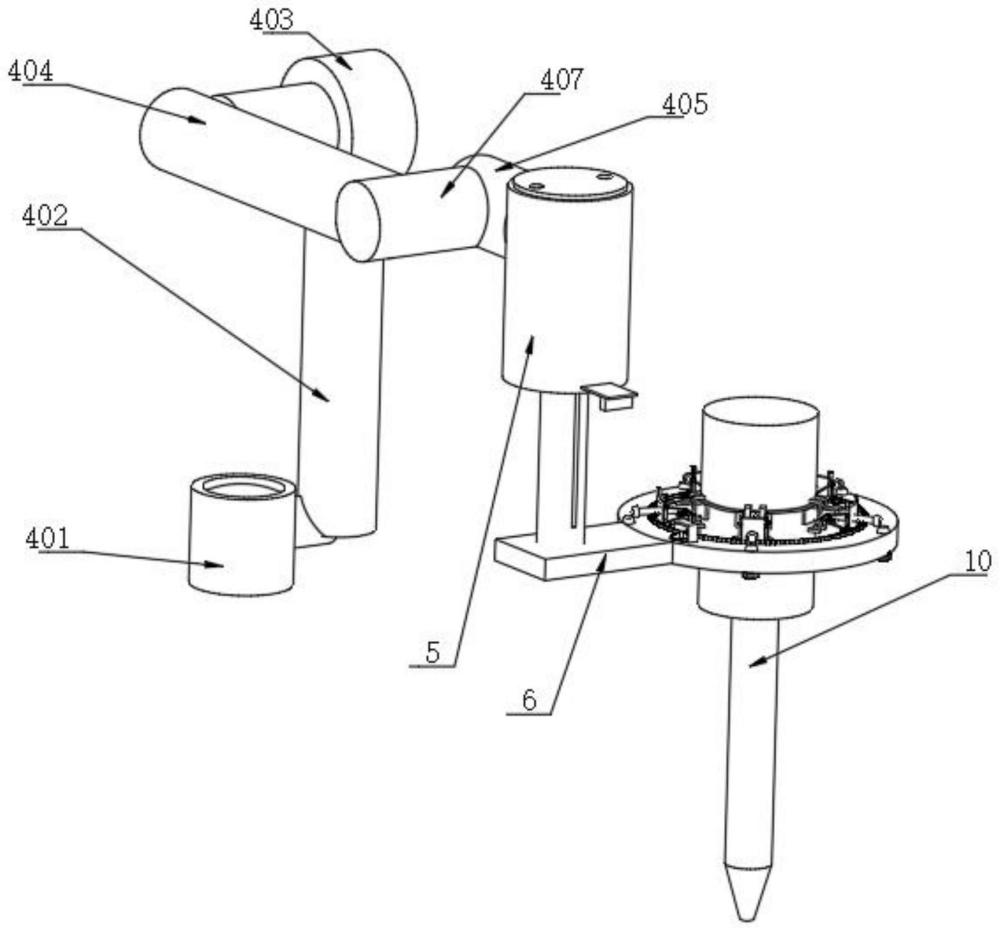
1、本发明通过以下技术方案予以实现:一种工业自动钻孔机器人,包括移动框架,所述移动框架外侧安装有移动装置,所述移动框架顶部固定连接有支撑架,所述支撑架顶部设有连接筒,所述连接筒与支撑架之间设有用于角度调整的调节机械臂;
2、所述连接筒底部设有固定板,所述连接筒外侧固定连接有测距相机,所述连接筒与固定板之间设有给进组件;
3、所述固定板一端固定连接有固定环内部设有钻孔装置,所述固定环顶部设有多组用于对固定环安装的夹持组件。
4、优选的,所述给进组件包括连接支杆,所述连接支杆设置于连接筒内部,所述连接支杆贯穿连接筒底部并与连接筒活动连接,所述连接支杆外侧开设有限位槽,所述限位槽外侧套设有第一齿轮,所述第一齿轮与连接筒内部底端转动连接,所述第一齿轮内壁固定连接有凸块,所述凸块延伸至限位槽内部并与限位槽滑动连接,可以通过第一齿轮内部的凸块带动连接支杆进行转动,并且不会影响连接支杆进行升降调整。
5、优选的,所述给进组件还包括第一支杆,所述第一支杆与连接筒内部底端转动连接,所述第一支杆外侧固定连接有第二齿轮,所述第二齿轮与凸块啮合连接,所述连接筒内部固定连接有第一电机,所述第一电机的输出端与第一支杆固定连接,所述连接支杆外侧转动连接有连接盘,所述连接盘与连接筒之间固定连接有第二液压伸缩杆,可以通过第二液压伸缩杆推动连接盘升降进而达到给进的目的。
6、优选的,所述夹持组件包括支撑板,所述支撑板固定连接于固定环顶部,所述支撑板内部转动连接有螺纹杆,所述螺纹杆一端螺纹连接有螺纹筒,所述螺纹筒一端固定连接有夹持板,所述支撑板与螺纹筒之间固定连接有第三伸缩杆,所述螺纹杆一端固定连接有第一锥齿轮,可以通过第三伸缩杆对螺纹筒进行限位,使螺纹筒进行水平移动,通过夹持板对钻孔装置进行夹持固定。
7、优选的,多个所述第一锥齿轮外侧均啮合连接有第二锥齿轮,多个所述第二锥齿轮底部均固定连接有转动杆,多个所述转动杆均贯穿固定环并与固定环转动连接,多个转动杆底部均固定连接有第三齿轮,所述固定环底部转动连接有第一外齿圈,所述第一外齿圈与多个第三齿轮啮合连接,所述第一外齿圈外侧啮合连接有第四齿轮,所述固定环底部固定连接有第三电机,所述第三电机的输出端与第四齿轮固定连接,可以通过第一外齿圈经过第三齿轮、转动杆和第二锥齿轮进行传动,使多个第一锥齿轮转动,从而同时使多个夹持板进行移动,达到对钻孔装置固定。
8、优选的,多个所述螺纹筒两侧均设有齿条,所述齿条底部固定连接有下连接板,所述齿条底部设有底板,所述底板与螺纹筒固定连接,所述底板与下连接板之间固定连接有第一伸缩杆,所述齿条一端铰接有c形夹持板,所述齿条顶部啮合连接有传动齿轮,所述传动齿轮内部固定连接有第二支杆,所述第二支杆与螺纹筒转动连接,所述支撑板两侧均设有l形固定板,所述l形固定板顶部固定连接有第二伸缩杆,所述第二伸缩杆顶部固定连接有固定架,所述固定架与支撑板固定连接,所述第二伸缩杆外侧套设有弹簧,所述弹簧的两端分别与固定架和l形固定板固定连接,所述l形固定板一侧转动连接有第二带轮,所述支撑板一侧设有第二转动杆,所述第二转动杆贯穿支撑板并与支撑板转动连接,所述第二转动杆两端均固定连接有第三带轮,所述第二支杆一端固定连接有第一带轮,所述第二带轮、第三带轮和第一带轮外侧套设有皮带并通过皮带传动连接,可以通过第二带轮、第三带轮和第一带轮的传动使传动齿轮进行转动,进而推动c形夹持板对钻孔装置进行进一步固定。
9、优选的,多个所述第二转动杆一端均固定连接有第三锥齿轮,所述第三锥齿轮底部啮合连接有第四锥齿轮,所述第四锥齿轮底部固定连接有第五齿轮,所述第五齿轮与固定环转动连接,所述固定环底部转动连接有内外齿圈,所述内外齿圈外侧啮合连接有第六齿轮,所述固定环顶部固定连接有第二电机,所述第二电机的输出端与第六齿轮固定连接。
10、优选的,所述调节机械臂包括第一伺服电机,所述第一伺服电机的输出端连接有第一支臂,所述第一支臂一端固定连接有第二伺服电机,所述第二伺服电机的输出端连接有第二支臂,所述第二支臂的一端固定连接有第五伺服电机,所述第五伺服电机的输出端连接有第三伺服电机,所述第三伺服电机的输出端与连接筒固定连接,所述支撑架底部固定连接有第四伺服电机,所述第四伺服电机的输出端与第一伺服电机固定连接,所述第一伺服电机与支撑架转动连接,可以对钻孔装置进行多角度调整,提高钻孔的范围。
11、一种工业自动钻孔机器人的控制系统,包括控制终端和信息采集单元,所述控制终端的输出端连接有用于对操作数据进行处理的中央处理器,所述信息采集单元的输入端与中央处理器的输入端连接,所述信息采集单元的输出端连接有用于对协同中央处理器处理图像的视觉分析模块,所述视觉分析模块的输入端与中央处理器的输出端连接,所述视觉分析模块的输出端连接有反馈模块,所述反馈模块的输出端与中央处理器输出端连接,所述中央处理器的输出端连接有机械臂控制模块,所述中央处理器的输出端连接有用于钻进深度角度数据保存的数据存储模块,所述数据存储模块的输出端连接有数据导出模块,所述中央处理器的输出端连接有数据处理生成的三维展示模块,所述三维展示模块的输出端与数据存储模块的输入端连接,所述中央处理器的输出端连接有用于报警提示的语音信号发射器,所述语音信号发射器的输出端连接有移动终端。
12、优选的,所述信息采集单元包括用于拍摄的相机模块和用于设备移动的雷达模块,所述相机模块和雷达模块的输出端均与中央处理器的输入端连接。
13、本发明提供了一种工业自动钻孔机器人,其具备的有益效果如下:
14、1、该工业自动钻孔机器人,通过设置的相机模块拍摄照片将其输送至视觉分析模块,通过视觉分析模块对照片进行分析,判断钻孔的点位正确,并通过反馈模块反馈给中央处理器,再经过三维展示模块建立立体的数据模型,并上传至数据存储模块保存,后期可以通过数据导出模块进行导出,同时在钻孔过程中如果出现故障,可以通过语音信号发射器进行发射信号,发送至移动终端,人员对其进行检查,维护,避免造成过大损失。
15、2、该工业自动钻孔机器人,通过启动支撑架上的第四伺服电机,第四伺服电机带动第一伺服电机进行转动调整方向,第一伺服电机的输出端带动第一支臂,并通过第二伺服电机和第二支臂以及第三伺服电机达到多个角度的调整,使其更加灵活,并且还可以在打孔的过程中通过连接筒内部的第二液压伸缩杆推动连接盘,连接盘带动转动连接的连接支杆进行升降,使连接支杆带动固定板下降,使钻孔装置钻孔的过程中进行逐级给进,不断延伸钻孔的深度。
16、3、该工业自动钻孔机器人,通过启动第二电机,第二电机带动固定连接的第六齿轮,第六齿轮带动啮合连接的内外齿圈,内外齿圈带动多个啮合连接的第五齿轮进行转动,第五齿轮带动第四锥齿轮转动,第四锥齿轮带动啮合连接的第三锥齿轮转动,第三锥齿轮带动外侧固定连接的第三带轮转动,通过第三带轮、第二带轮和第一带轮传动,使第二支杆转动,第二支杆带动固定连接的传动齿轮转动,传动齿轮带动啮合连接的齿条移动,齿条推动一端铰接的c形夹持板,c形夹持板对钻孔装置外侧进行夹持,由于齿条与c形夹持板铰接,使钻孔装置可以针对不同半径位置进行固定,保证对钻孔装置固定稳定性,同时也便于后期进行拆卸。
17、4、该工业自动钻孔机器人的控制系统,通过多个第三齿轮带动固定连接的转动杆转动,转动杆带动固定连接的第二锥齿轮转动,第二锥齿轮带动啮合连接的第一锥齿轮转动,进而第一锥齿轮带动固定连接的螺纹杆转动,螺纹杆外侧螺纹连接有螺纹筒,螺纹筒与支撑板之间固定连接有第三伸缩杆,使螺纹筒推动夹持板一端,使夹持板对钻孔装置进行固定夹持,保证对不同尺寸的钻孔装置进行快速安装固定。
- 还没有人留言评论。精彩留言会获得点赞!