一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置的制作方法
本发明涉及风电设备清洗装置,特别涉及一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置。
背景技术:
1、风力发电是指利用风力发电机组直接将风能转化为电能的发电方式。在风能的各种利用形式中,风力发电是风能利用的主要形式,也是目前可再生能源中技术最成熟、最具有规模化开发条件和商业化发展前景的发电方式之一。据统计,截止2020年6月底,全国风电累计装机2.17亿千瓦,其中陆上风电累计装机2.1亿千瓦、海上风电累计装机699万千瓦,海上发电的比重正在逐步提升。
2、随着我国风电装机数量的增加,风电运维市场越来越大,工作也越来越复杂,特别是我国风电机组种类多,未来对风电运维的管理提出了更高的要求。风电机组运维主要是指风电机组的定期检修和日常维护。目前针对风电塔筒、叶片的清洗、除锈、翻新维护均是以高空作业“蜘蛛人”为主。
3、然而,这种作业方式,靠一根保险绳和一根作业绳,从地面缓缓上升,悬挂在几十米高的塔筒、叶片外侧,进行勘察、维修等工作。上升到半空中后,由于没有固定的着力点,只能用绳子将人和叶片套住,才能开始作业。整个过程要保持平衡全靠腰腹力量支撑,有时候用膝盖顶着叶片,时间一长,膝盖都淤青了。每次作业,除了一身的装备,还有腰间挂的三个桶,里面装的都是维修所需的工具和材料。桶加上材料、工具,有十几斤重。
4、存在的不足主要包括:
5、1、作业风险大,高空作业,风的影响;
6、2、效率低;
7、3、成本高,作业停机时间长,发电损失大。
技术实现思路
1、本发明的主要目的在于提供一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置,可以有效解决背景技术中的问题。
2、为实现上述目的,本发明采取的技术方案为:
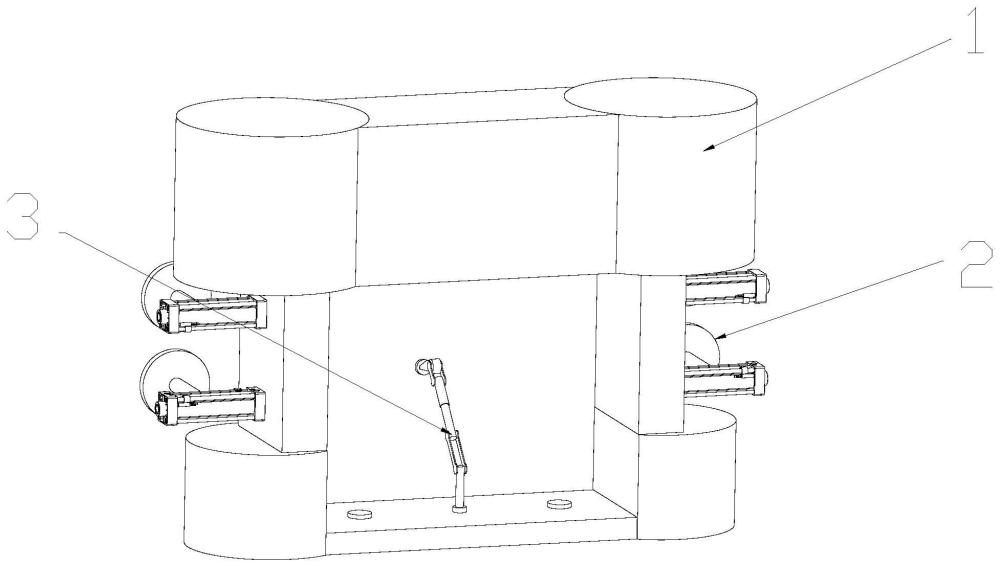
3、一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置,该装置包括机器人主体、控制器、电源模块、传感器模块、防抖动装置、图像处理模块和喷绘模块,所述机器人主体包括移动装置和执行装置,所述的移动装置固定在执行装置的一侧,移动装置用于在风电塔筒表面移动,执行装置可对风电塔筒进行除锈、补漆、喷绘及探伤作业;所述控制器用于控制移动装置和执行装置的动作;所述电源模块为移动装置和执行装置提供动力;所述传感器模块与控制器电性连接,用于实时监测作业环境和风电塔筒的状态;所述防抖动模块可有效减少执行装置运动过程中的抖动;所述图像处理模块可对采集的图像进行处理并传输给控制器;所述喷绘模块用于控制执行装置对风电塔筒进行喷绘作业。
4、与现有技术相比,本发明提供了一种智能化的风电塔筒维护平台,可以对塔筒外壁进行自动清洗、除油、除锈、探伤检测、防腐翻新等。其优点在于:
5、1、无人化,地面遥控作业,人员避免高空作业;
6、2、高效率,可对塔筒外壁进行全面覆盖;
7、3、智能化,搭载摄像头,缺陷自动识别,自动处理;
8、4、模块化,快装快拆模块化设计,便于运输和安装。
技术特征:
1.一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置,其特征在于:该装置包括机器人主体、控制器、电源模块、传感器模块、防抖动装置、图像处理模块和喷绘模块,所述机器人主体包括移动装置和执行装置,所述的移动装置固定在执行装置的一侧,移动装置用于在风申筒表面移动,执行装置可对风电塔筒进行除锈、补漆、喷绘及探伤作业;所述控制器用于控制移动装置和执行装置的动作;所述电源模块为移动装置和执行装置提供动力;所述传感器模块与控制器电性连接,用于实时监测作业环境和风电塔筒的状态;所述防抖动模块可有效减少执行装置运动过程中的抖动;所述图像处理模块可对采集的图像进行处理并传输给控制器;所述喷绘模块用于控制执行装置对风电塔筒进行喷绘作业。
技术总结
本发明涉及风电设备清洗装置技术领域,特别涉及一种用于风电塔筒除锈补漆绘探伤高空全自动机器人作业装置。该装置包括机器人主体、控制器、电源模块、传感器模块、防抖动装置、图像处理模块和喷绘模块,所述机器人主体包括移动装置和执行装置,所述的移动装置固定在执行装置的一侧,移动装置用于在风电塔筒表面移动,执行装置可对风电塔筒进行除锈、补漆、喷绘及探伤作业;本发明可以对塔筒外壁进行自动清洗、除油、除锈、探伤检测、防腐翻新等。
技术研发人员:于景龙,于波,闻增鑫,张秉龙,卢浩然,葛鎣,卢伟,张宏,陈晓贺,张俊东,王开,王明跃
受保护的技术使用者:吉林省跃隆晟新能源科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!