用于变电站设备维护机器人的控制方法及系统与流程
本发明涉及智能控制,尤其涉及用于变电站设备维护机器人的控制方法及系统。
背景技术:
1、变电站设备维护机器人是一种用于变电站设备巡检、操作和维护的智能机器人,其通常具备自主导航、巡检、定位、定时等功能,可以代替人工执行危险、繁重、重复性工作,提高作业效率,降低运维成本,同时保障人员安全。然而,现有技术对于复杂的变电站环境,机器人控制适应性较差,导致变电站设备维护分析准确性较低。
技术实现思路
1、本申请通过提供用于变电站设备维护机器人的控制方法及系统,解决了现有技术对于复杂的变电站环境,机器人控制适应性较差,导致变电站设备维护分析准确性较低的技术问题,达到依据变电站环境实现机器人自适应巡检控制,提高变电站设备运行分析准确性和分析效率,进而确保变电站设备及时运维的技术效果。
2、鉴于上述问题,本发明提供了用于变电站设备维护机器人的控制方法及系统。
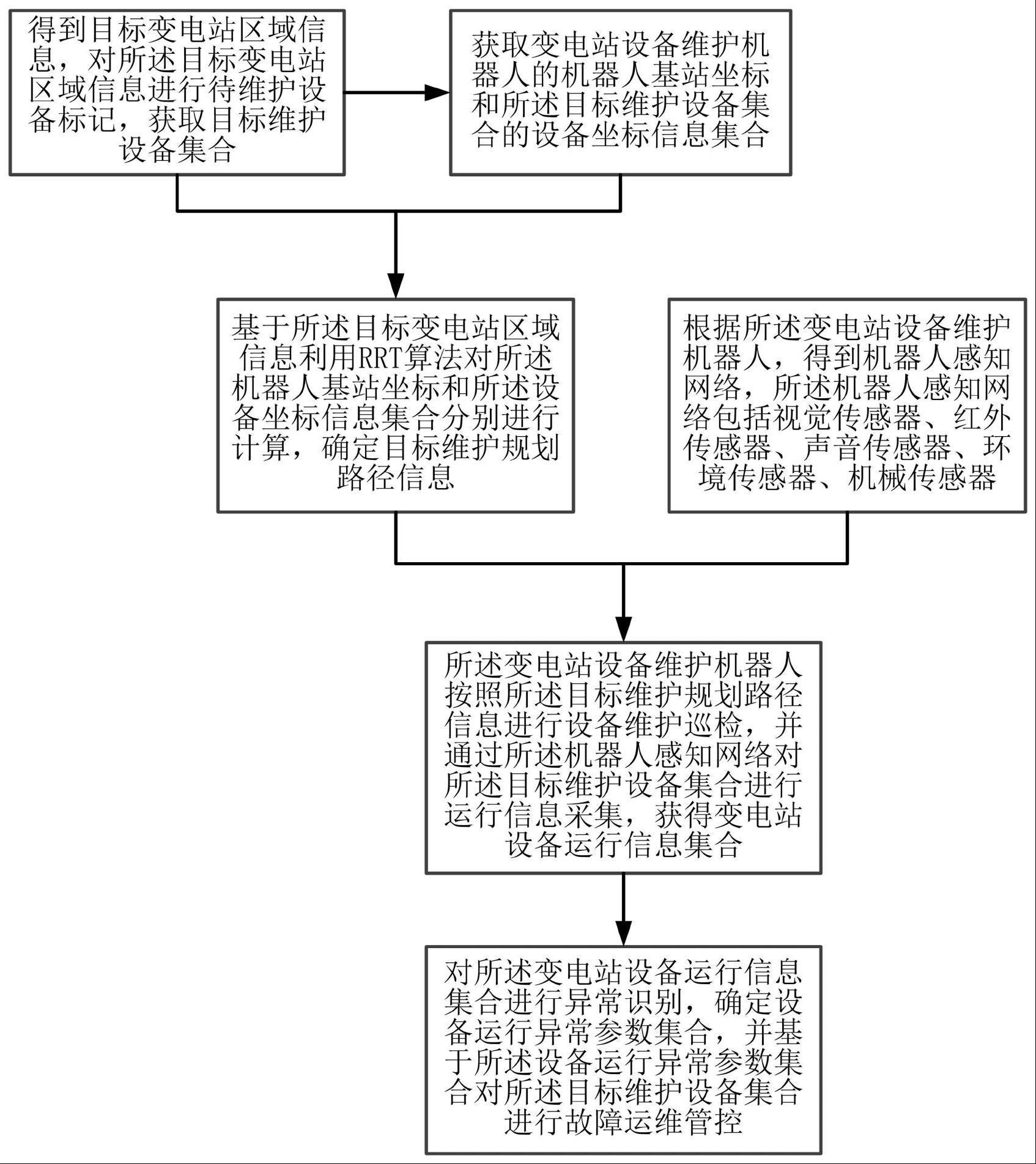
3、第一方面,本申请提供了用于变电站设备维护机器人的控制方法,所述方法包括:得到目标变电站区域信息,对所述目标变电站区域信息进行待维护设备标记,获取目标维护设备集合;获取变电站设备维护机器人的机器人基站坐标和所述目标维护设备集合的设备坐标信息集合;基于所述目标变电站区域信息利用rrt算法对所述机器人基站坐标和所述设备坐标信息集合分别进行计算,确定目标维护规划路径信息;根据所述变电站设备维护机器人,得到机器人感知网络,所述机器人感知网络包括视觉传感器、红外传感器、声音传感器、环境传感器、机械传感器;所述变电站设备维护机器人按照所述目标维护规划路径信息进行设备维护巡检,并通过所述机器人感知网络对所述目标维护设备集合进行运行信息采集,获得变电站设备运行信息集合;对所述变电站设备运行信息集合进行异常识别,确定设备运行异常参数集合,并基于所述设备运行异常参数集合对所述目标维护设备集合进行故障运维管控。
4、另一方面,本申请还提供了用于变电站设备维护机器人的控制系统,所述系统包括:维护设备标记模块,用于得到目标变电站区域信息,对所述目标变电站区域信息进行待维护设备标记,获取目标维护设备集合;坐标信息获取模块,用于获取变电站设备维护机器人的机器人基站坐标和所述目标维护设备集合的设备坐标信息集合;维护规划路径确定模块,用于基于所述目标变电站区域信息利用rrt算法对所述机器人基站坐标和所述设备坐标信息集合分别进行计算,确定目标维护规划路径信息;机器人感知网络获得模块,用于根据所述变电站设备维护机器人,得到机器人感知网络,所述机器人感知网络包括视觉传感器、红外传感器、声音传感器、环境传感器、机械传感器;设备维护巡检模块,用于所述变电站设备维护机器人按照所述目标维护规划路径信息进行设备维护巡检,并通过所述机器人感知网络对所述目标维护设备集合进行运行信息采集,获得变电站设备运行信息集合;故障运维管控模块,用于对所述变电站设备运行信息集合进行异常识别,确定设备运行异常参数集合,并基于所述设备运行异常参数集合对所述目标维护设备集合进行故障运维管控。
5、第三方面,本申请提供了一种电子设备,包括总线、收发器、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述收发器、所述存储器和所述处理器通过所述总线相连,所述计算机程序被所述处理器执行时实现上述任意一项所述方法中的步骤。
6、第四方面,本申请还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一项所述方法中的步骤。
7、本申请中提供的一个或多个技术方案,至少具有如下技术效果或优点:
8、由于采用了基于目标变电站区域信息利用rrt算法对机器人基站坐标和设备坐标信息集合分别进行计算,确定目标维护规划路径信息,同时根据所述变电站设备维护机器人,得到机器人感知网络,所述变电站设备维护机器人按照所述目标维护规划路径信息进行设备维护巡检,并通过所述机器人感知网络对目标维护设备集合进行运行信息采集,获得变电站设备运行信息集合,进而以此进行设备异常识别,确定设备运行异常参数集合,并基于所述设备运行异常参数集合对所述目标维护设备集合进行故障运维管控的技术方案。进而达到依据变电站环境实现机器人自适应巡检控制,提高变电站设备运行分析准确性和分析效率,进而确保变电站设备及时运维的技术效果。
9、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.用于变电站设备维护机器人的控制方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述确定目标维护规划路径信息,包括:
3.如权利要求2所述的方法,其特征在于,所述确定所述目标维护规划路径信息,包括:
4.如权利要求3所述的方法,其特征在于,所述构建随机扩展树,包括:
5.如权利要求1所述的方法,其特征在于,所述确定设备运行异常参数集合,包括:
6.如权利要求5所述的方法,其特征在于,所述构建设备运行异常识别网络,包括:
7.如权利要求1所述的方法,其特征在于,所述基于所述设备运行异常参数集合对所述电站设备运行信息集合进行故障运维管控,包括:
8.用于变电站设备维护机器人的控制系统,其特征在于,所述系统包括:
9.一种电子设备,包括总线、收发器、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述收发器、所述存储器和所述处理器通过所述总线相连,其特征在于,所述计算机程序被所述处理器执行时实现如权利要求1-7中任一项所述的用于变电站设备维护机器人的控制方法中的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的用于变电站设备维护机器人的控制方法中的步骤。
技术总结
本发明公开了用于变电站设备维护机器人的控制方法及系统,涉及智能控制技术领域,所述方法包括:基于目标变电站区域信息利用RRT算法对机器人基站坐标和设备坐标信息集合分别进行计算,确定目标维护规划路径信息;变电站设备维护机器人按照所述目标维护规划路径信息进行设备维护巡检,并通过机器人感知网络对目标维护设备集合进行运行信息采集,获得变电站设备运行信息集合,进而以此进行异常识别,确定设备运行异常参数集合,并基于所述设备运行异常参数集合对所述目标维护设备集合进行故障运维管控。达到依据变电站环境实现机器人自适应巡检控制,提高变电站设备运行分析准确性和分析效率,进而确保变电站设备及时运维的技术效果。
技术研发人员:阚久辉,赵正,郭胤,张传驰,时盟,王佳琦,苗飞,滕松,张珊
受保护的技术使用者:国网江苏省电力有限公司徐州供电分公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!