一种颈部结构及机器人的制作方法
本申请涉及机器人,尤其涉及一种颈部结构及机器人。
背景技术:
1、人形机器人是一种外形与人类相似,具备一定的人机交互和动作能力的机器人。颈部结构是人形机器人的重要组成部分,用于连接人形机器人的躯体结构和头部结构。
2、相关技术中,通过第一舵机与头部结构连接,第二舵机与第一舵机连接,这样,第一舵机能够驱动头部结构绕一方向转动,使得机器人能够完成点头动作,第二舵机能够驱动第一舵机和头部结构一起绕另一方向转动,使得机器人能够完成转头动作。然而,上述结构中头部结构的运动自由度有限,只能进行简单的转头和点头动作,仿生效果并不理想。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种颈部结构及机器人,旨在解决现有技术中头部结构的运动自由度有限,仿生效果不理想的技术问题。
2、为实现上述目的,本申请采用的技术方案如下:
3、第一方面,本申请的实施例提供了一种颈部结构,包括:
4、支撑部,通过第一驱动件与头部结构转动连接,所述第一驱动件用于驱动所述头部结构相对所述支撑部转动,所述支撑部具有第一端和第二端,所述第一端与躯体结构转动连接;
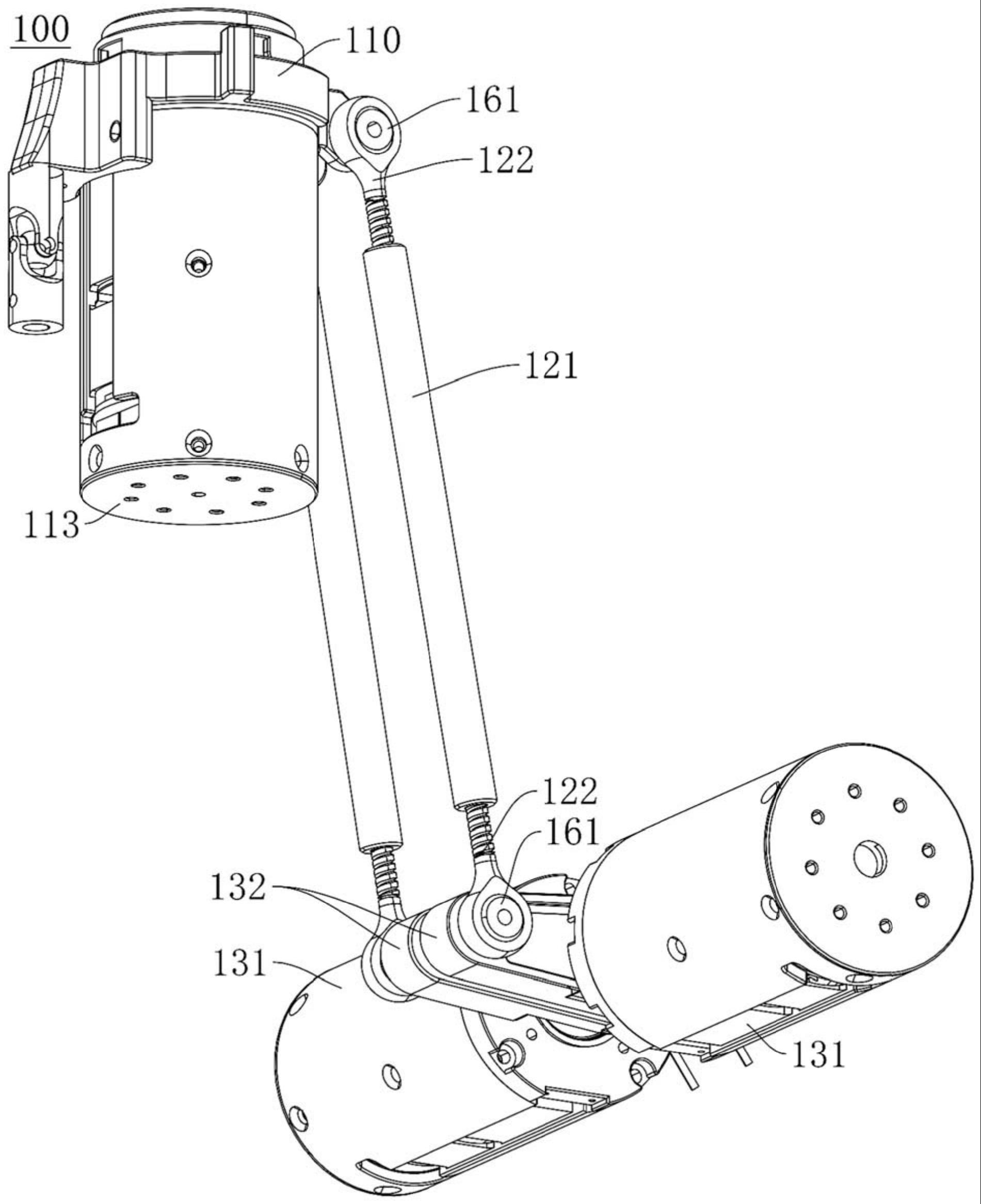
5、传动部,设置有两个,每个所述传动部的一端均与所述第二端转动连接;
6、驱动部,设置于所述躯体结构上,所述驱动部包括第二驱动件和摆臂,所述第二驱动件与所述摆臂的一端连接,用于驱动所述摆臂转动,所述驱动部设置有两个,每个所述摆臂远离所述第二驱动件的一端与一个所述传动部远离所述支撑部的一端转动连接。
7、在第一方面的其中一个实施例中,所述颈部结构还包括两个弹性部,每个所述弹性部与一个所述摆臂耦合,所述弹性部用于向所述传动部的方向对所述摆臂施加弹性支撑力。
8、在第一方面的其中一个实施例中,所述弹性部为扭簧,所述摆臂的一端设置有连接凸台,所述摆臂远离所述连接凸台的一端设置有限位筋,所述第二驱动件的输出端与所述连接凸台连接,所述扭簧套设于所述连接凸台设置,且所述扭簧的一端固定设置,所述扭簧的另一端能够与所述限位筋背离所述传动部的一侧抵接。
9、在第一方面的其中一个实施例中,所述扭簧包括第一弹性段、第二弹性段和环形段,所述环形段套设于所述连接凸台设置,并连接于所述第一弹性段和所述第二弹性段之间,所述第一弹性段能够与所述限位筋背离所述传动部的一侧抵接,所述第二弹性段固定于所述第二驱动件或所述躯体结构设置。
10、在第一方面的其中一个实施例中,所述传动部包括连接杆和两个连接件,所述连接杆连接于两个所述连接件之间,所述第二端和所述摆臂上均设置有球形件,所述连接件设置有敞口的球形腔,每个所述连接件通过所述球形腔套设于一个所述球形件设置,所述球形件与所述球形腔间隙配合。
11、在第一方面的其中一个实施例中,所述连接件包括球套和螺杆,所述球套与所述螺杆的一端连接,并设置有所述球形腔,所述连接杆开设有螺纹孔,所述螺杆远离所述球套的部分穿设于所述螺纹孔设置。
12、在第一方面的其中一个实施例中,两个所述球形件的球心之间的距离为d,满足关系式:25mm≤d≤40mm。
13、在第一方面的其中一个实施例中,所述传动部相对所述摆臂的转动轴线与所述摆臂的转动轴线之间的距离为l1,满足关系式:28mm≤l1≤48mm。
14、在第一方面的其中一个实施例中,所述传动部相对所述摆臂的转动轴线与所述传动部相对所述支撑部的转动轴线之间的距离为l2,满足关系式:130mm≤l2≤170mm。
15、在第一方面的其中一个实施例中,所述颈部结构还包括万向节,所述万向节包括第一连接件、第二连接件和转动件,所述第一连接件与所述第一端连接,所述第二连接件与所述躯体结构连接,所述转动件分别与所述第一连接件和所述第二连接件铰接,所述第一连接件相对所述转动件的转动轴线与所述第二连接件相对所述转动件的转动轴线不重合。
16、第二方面,本申请的实施例还提供了一种机器人,包括上述任一实施例中所述的颈部结构。
17、本申请的有益效果是:
18、本申请提供的颈部结构中,支撑部通过第一驱动件与头部结构转动连接,将支撑部的第一端与躯体结构转动连接,并将支撑部的第二端分别与两个传动部转动连接,在此基础上,还设置了两个驱动部,每个驱动部均包括第二驱动件和摆臂,每个第二驱动件与一个摆臂的一端连接,每个摆臂远离第二驱动件的一端与一个传动部远离支撑部的一端转动连接,这样,在第一驱动件的驱动下,头部结构能够相对颈部结构转动,同时,在两个驱动部的驱动下,支撑部能够相对躯体结构活动,如此能够组合出多种头部活动动作,自由度更多,更接近人类的头部活动模式,因此仿生效果更好,提高了机器人的市场竞争力。
19、为使本申请的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种颈部结构,其特征在于,包括:
2.根据权利要求1所述的颈部结构,其特征在于,所述颈部结构还包括两个弹性部,每个所述弹性部与一个所述摆臂耦合,所述弹性部用于向所述传动部的方向对所述摆臂施加弹性支撑力。
3.根据权利要求2所述的颈部结构,其特征在于,所述弹性部为扭簧,所述摆臂的一端设置有连接凸台,所述摆臂远离所述连接凸台的一端设置有限位筋,所述第二驱动件的输出端与所述连接凸台连接,所述扭簧套设于所述连接凸台设置,且所述扭簧的一端固定设置,所述扭簧的另一端能够与所述限位筋背离所述传动部的一侧抵接。
4.根据权利要求3所述的颈部结构,其特征在于,所述扭簧包括第一弹性段、第二弹性段和环形段,所述环形段套设于所述连接凸台设置,并连接于所述第一弹性段和所述第二弹性段之间,所述第一弹性段能够与所述限位筋背离所述传动部的一侧抵接,所述第二弹性段固定于所述第二驱动件或所述躯体结构设置。
5.根据权利要求1所述的颈部结构,其特征在于,所述传动部包括连接杆和两个连接件,所述连接杆连接于两个所述连接件之间,所述第二端和所述摆臂上均设置有球形件,所述连接件设置有敞口的球形腔,每个所述连接件通过所述球形腔套设于一个所述球形件设置,所述球形件与所述球形腔间隙配合。
6.根据权利要求5所述的颈部结构,其特征在于,所述连接件包括球套和螺杆,所述球套与所述螺杆的一端连接,并设置有所述球形腔,所述连接杆开设有螺纹孔,所述螺杆远离所述球套的部分穿设于所述螺纹孔设置。
7.根据权利要求5所述的颈部结构,其特征在于,两个所述球形件的球心之间的距离为d,满足关系式:25mm≤d≤40mm。
8.根据权利要求1至7中任一项所述的颈部结构,其特征在于,所述传动部相对所述摆臂的转动轴线与所述摆臂的转动轴线之间的距离为l1,满足关系式:28mm≤l1≤48mm。
9.根据权利要求1至7中任一项所述的颈部结构,其特征在于,所述传动部相对所述摆臂的转动轴线与所述传动部相对所述支撑部的转动轴线之间的距离为l2,满足关系式:130mm≤l2≤170mm。
10.根据权利要求1至7中任一项所述的颈部结构,其特征在于,所述颈部结构还包括万向节,所述万向节包括第一连接件、第二连接件和转动件,所述第一连接件与所述第一端连接,所述第二连接件与所述躯体结构连接,所述转动件分别与所述第一连接件和所述第二连接件铰接,所述第一连接件相对所述转动件的转动轴线与所述第二连接件相对所述转动件的转动轴线不重合。
11.一种机器人,其特征在于,包括权利要求1至10中任一项所述的颈部结构。
技术总结
本申请公开了一种颈部结构及机器人,涉及机器人技术领域。颈部结构包括:通过第一驱动件与头部结构转动连接的支撑部,与支撑部的第二端转动连接的两个传动部,以及设置于躯体结构上的两个驱动部。第一驱动件用于驱动头部结构相对支撑部转动,驱动部包括第二驱动件和摆臂,第二驱动件与摆臂的一端连接,用于驱动摆臂转动,每个摆臂远离第二驱动件的一端与一个传动部远离支撑部的一端转动连接。本申请提供的颈部结构,在第一驱动件的驱动下,头部结构能够相对颈部结构转动,同时,在两个驱动部的驱动下,支撑部能够相对躯体结构活动,这样能够组合出多种头部活动动作,自由度更多,使得机器人的仿生效果更好。
技术研发人员:房雄远,刘乐锋,索文豪,梁忠浩
受保护的技术使用者:深圳市优世界机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!